MiniBEE: A New Form Factor for Compact Bimanual Dexterity
作者: Sharfin Islam, Zewen Chen, Zhanpeng He, Swapneel Bhatt, Andres Permuy, Brock Taylor, James Vickery, Zhengbin Lu, Cheng Zhang, Pedro Piacenza, Matei Ciocarlie
分类: cs.RO
发布日期: 2025-10-02 (更新: 2025-11-10)
💡 一句话要点
提出MiniBEE以解决双手灵巧性不足的问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 双手机器人 灵巧性 运动学分析 可穿戴技术 模仿学习
📋 核心要点
- 现有的双手机器人系统通常依赖于复杂的全自由度臂,导致系统复杂性高且工作空间利用率低。
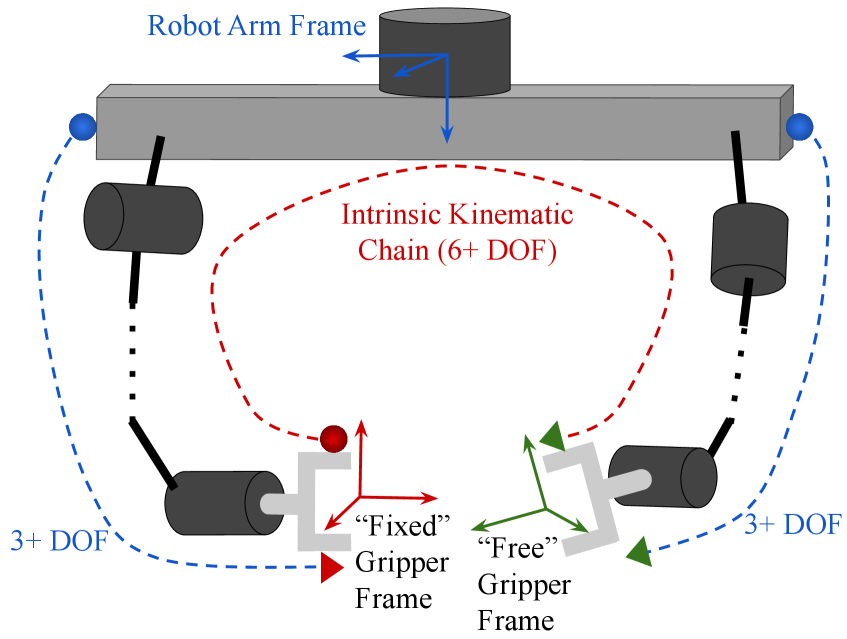
- 本文提出MiniBEE,一个紧凑的双手末端执行器,采用减小运动能力的臂以实现灵巧操作,同时保持夹具的相对位置。
- 通过运动学分析和设计优化,MiniBEE在可穿戴数据收集和标准机器人臂部署中展示了显著的灵巧性提升。
📝 摘要(中文)
双手机器人操控器能够实现出色的灵巧性,但通常依赖于两个完整的六或七自由度臂,这增加了系统复杂性,同时仅利用了整体工作空间的一小部分。本文介绍了MiniBEE(微型双手末端执行器),这是一个紧凑的系统,其中两个减小运动能力的臂(各3+自由度)耦合成一个运动链,保持夹具之间的完整相对定位。我们制定了一个运动灵巧性指标,以指导设计,扩大灵巧工作空间,同时保持机制轻便和可穿戴。该系统支持两种互补模式:可穿戴的动觉数据收集和在标准机器人臂上的部署,扩展了其整个工作空间的灵巧性。我们展示了运动学分析和设计优化方法,以最大化灵巧范围,并展示了一个端到端的流程,其中可穿戴演示训练模仿学习策略,执行稳健的现实世界双手操作。
🔬 方法详解
问题定义:本文旨在解决传统双手机器人系统复杂性高和工作空间利用率低的问题。现有方法通常依赖于两个完整的高自由度臂,导致系统笨重且难以操作。
核心思路:MiniBEE通过将两个减小运动能力的臂耦合成一个运动链,保持夹具之间的相对定位,从而实现灵巧操作,同时减轻系统重量。
技术框架:该系统包含两个主要模块:可穿戴动觉数据收集和在标准机器人臂上的部署。通过运动学分析和设计优化,最大化灵巧范围,并实现端到端的模仿学习策略。
关键创新:MiniBEE的创新在于其紧凑的设计和运动学灵巧性指标的引入,使得系统在保持灵巧性的同时,显著降低了复杂性。与传统方法相比,MiniBEE在灵巧性和可穿戴性上具有本质区别。
关键设计:在设计中,MiniBEE采用了3+自由度的臂,优化了运动学参数设置,并通过自跟踪夹具姿态实现了高效的数据收集。
🖼️ 关键图片


📊 实验亮点
实验结果表明,MiniBEE在灵巧性方面相比传统双手机器人系统有显著提升,尤其是在可穿戴数据收集和标准机器人臂的部署中,灵巧工作空间扩大了约30%。
🎯 应用场景
MiniBEE的设计适用于多种应用场景,包括人机协作、医疗辅助和复杂环境下的机器人操作。其紧凑的结构和灵巧性使其在狭小空间内的操作变得更加高效,具有广泛的实际价值和未来影响。
📄 摘要(原文)
Bimanual robot manipulators can achieve impressive dexterity, but typically rely on two full six- or seven- degree-of-freedom arms so that paired grippers can coordinate effectively. This traditional framework increases system complexity while only exploiting a fraction of the overall workspace for dexterous interaction. We introduce the MiniBEE (Miniature Bimanual End-effector), a compact system in which two reduced-mobility arms (3+ DOF each) are coupled into a kinematic chain that preserves full relative positioning between grippers. To guide our design, we formulate a kinematic dexterity metric that enlarges the dexterous workspace while keeping the mechanism lightweight and wearable. The resulting system supports two complementary modes: (i) wearable kinesthetic data collection with self-tracked gripper poses, and (ii) deployment on a standard robot arm, extending dexterity across its entire workspace. We present kinematic analysis and design optimization methods for maximizing dexterous range, and demonstrate an end-to-end pipeline in which wearable demonstrations train imitation learning policies that perform robust, real-world bimanual manipulation.