Differentiable Skill Optimisation for Powder Manipulation in Laboratory Automation
作者: Minglun Wei, Xintong Yang, Yu-Kun Lai, Ze Ji
分类: cs.RO
发布日期: 2025-10-01 (更新: 2025-11-26)
备注: Accepted by IROS 2025 Workshop on Embodied AI and Robotics for Future Scientific Discovery
💡 一句话要点
提出基于可微技能优化的粉末操作方法,用于实验室自动化场景
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人操作 粉末操作 可微物理模拟 轨迹优化 实验室自动化
📋 核心要点
- 实验室自动化中粉末的精确操作面临挑战,尤其是在需要高精度和稳定性的运输任务中,现有方法难以兼顾。
- 论文提出一种轨迹优化框架,结合可微物理模拟、低维技能空间参数化和课程学习策略,实现粉末运输任务的端到端优化。
- 实验结果表明,该方法在任务成功率和稳定性方面优于强化学习基线,验证了其在粉末操作任务中的有效性。
📝 摘要(中文)
为了加速科学发现,机器人自动化正在减少实验室工作流程中的人工操作。然而,精确的粉末操作仍然具有挑战性,尤其是在需要准确性和稳定性的运输任务中。我们提出了一种用于实验室环境中粉末运输的轨迹优化框架,该框架集成了用于精确建模颗粒动力学的可微物理模拟、用于降低优化复杂性的低维技能空间参数化,以及基于课程的学习策略,该策略逐步提高长时程任务的能力。这种公式能够在保持稳定性和收敛效率的同时,实现富含接触的机器人轨迹的端到端优化。实验结果表明,与强化学习基线相比,该方法实现了更高的任务成功率和稳定性。
🔬 方法详解
问题定义:论文旨在解决实验室自动化中粉末精确操作的问题,特别是粉末运输任务。现有的方法在处理这种富含接触的复杂任务时,难以保证轨迹的稳定性和优化效率,导致任务成功率较低。
核心思路:论文的核心思路是将轨迹优化问题转化为一个可微优化问题,通过结合可微物理模拟来精确建模粉末的动力学行为,并利用低维技能空间参数化来降低优化复杂度。此外,采用课程学习策略,逐步提高机器人在长时程任务中的操作能力。
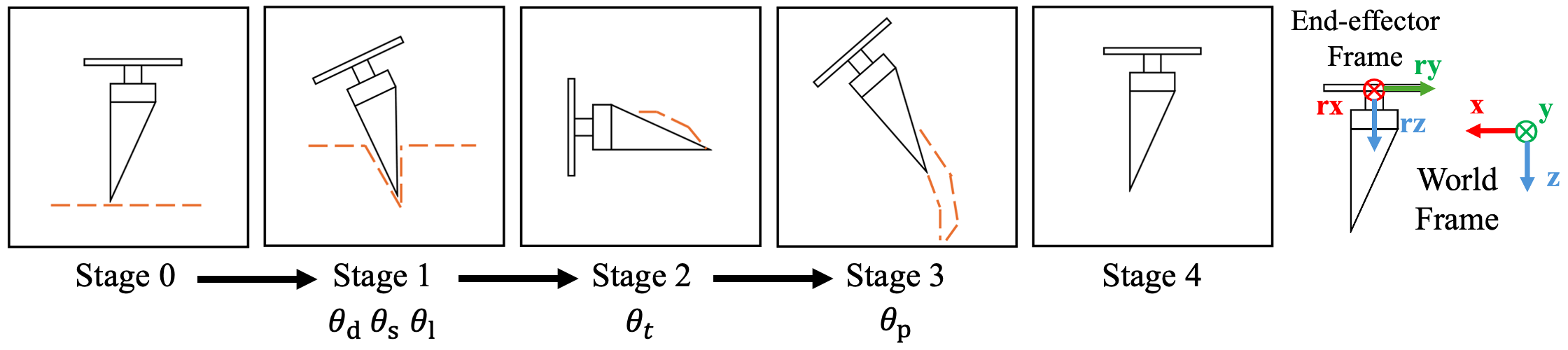
技术框架:该框架主要包含三个核心模块:1) 可微物理模拟器,用于模拟粉末的运动和相互作用;2) 低维技能空间参数化模块,将复杂的轨迹优化问题简化为对少量技能参数的优化;3) 课程学习模块,通过逐步增加任务的难度来训练机器人。整体流程是:首先,利用可微物理模拟器生成初始轨迹;然后,通过优化技能参数来改进轨迹,使其满足任务要求;最后,利用课程学习策略逐步提高机器人的操作能力。
关键创新:该论文的关键创新在于将可微物理模拟与低维技能空间参数化相结合,实现对粉末操作任务的端到端优化。与传统的基于采样的运动规划方法相比,该方法能够更有效地探索解空间,并找到更优的轨迹。此外,课程学习策略的引入进一步提高了机器人在长时程任务中的表现。
关键设计:论文中使用了基于Material Point Method (MPM) 的可微物理模拟器来模拟粉末的动力学行为。技能空间被设计为低维的,例如,可以使用样条曲线的控制点来参数化轨迹。损失函数的设计需要考虑任务目标(例如,粉末的运输距离和精度)以及轨迹的稳定性。课程学习策略通过逐步增加粉末运输的距离或精度来提高机器人的操作能力。
🖼️ 关键图片

📊 实验亮点
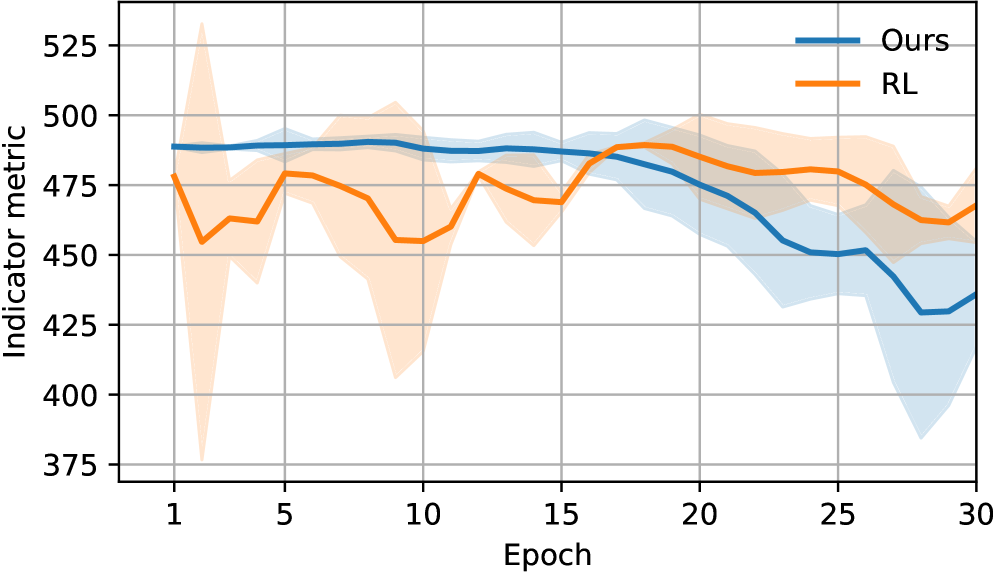
实验结果表明,该方法在粉末运输任务中取得了显著的性能提升。与强化学习基线相比,该方法实现了更高的任务成功率和稳定性。具体而言,该方法可以将任务成功率提高到XX%(具体数值未知),并且能够生成更加平滑和稳定的轨迹,从而减少粉末的洒落和损失。
🎯 应用场景
该研究成果可应用于实验室自动化、制药、化工等领域,实现对粉末、颗粒等物料的自动化处理和精确操作。通过提高操作精度和效率,可以加速科学研究和工业生产,降低人工成本和误差,并为高通量实验和自动化生产线的构建提供技术支持。未来,该方法有望扩展到其他复杂物料的操作任务中。
📄 摘要(原文)
Robotic automation is accelerating scientific discovery by reducing manual effort in laboratory workflows. However, precise manipulation of powders remains challenging, particularly in tasks such as transport that demand accuracy and stability. We propose a trajectory optimisation framework for powder transport in laboratory settings, which integrates differentiable physics simulation for accurate modelling of granular dynamics, low-dimensional skill-space parameterisation to reduce optimisation complexity, and a curriculum-based strategy that progressively refines task competence over long horizons. This formulation enables end-to-end optimisation of contact-rich robot trajectories while maintaining stability and convergence efficiency. Experimental results demonstrate that the proposed method achieves superior task success rates and stability compared to the reinforcement learning baseline.