Kilometer-Scale GNSS-Denied UAV Navigation via Heightmap Gradients: A Winning System from the SPRIN-D Challenge
作者: Michal Werner, David Čapek, Tomáš Musil, Ondřej Franěk, Tomáš Báča, Martin Saska
分类: cs.RO
发布日期: 2025-10-01
备注: 8 pages
💡 一句话要点
提出基于梯度匹配的GNSS拒止无人机导航系统,实现公里级自主飞行
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 无人机导航 GNSS拒止 梯度匹配 激光雷达 粒子滤波
📋 核心要点
- 在GNSS拒止环境中,无人机长距离可靠飞行面临里程计漂移累积、无闭环检测等难题。
- 该系统通过梯度模板匹配校正漂移,将激光雷达局部高度图与先验地理数据高度图对齐,并融合里程计信息。
- 系统成功完成公里级飞行挑战,显著降低了漂移,并在CPU硬件上实现了实时运行。
📝 摘要(中文)
本文提出了一种完全自主的无人机(UAV)系统,用于SPRIN-D Funke全自主飞行挑战赛,该挑战要求在无GNSS或预先密集地图的情况下,进行低于地面25米,长达9公里的远程航点导航。该系统集成了感知、建图、规划和控制,并采用了一种轻量级的漂移校正方法,该方法通过梯度模板匹配将激光雷达(LiDAR)导出的局部高度图与先验地理数据高度图进行匹配,并将证据与里程计在聚类粒子滤波器中融合。在比赛中,该系统在城市、森林和开阔地等地形上执行了公里级的飞行,相对于原始里程计,显著降低了漂移,同时在仅使用CPU的硬件上实时运行。本文描述了系统架构、定位流程和比赛评估,并报告了来自现场部署的实践见解,为GNSS拒止的无人机自主导航设计提供了参考。
🔬 方法详解
问题定义:在GNSS拒止的环境中,如何实现无人机长距离的自主导航,尤其是在没有预先构建的详细地图的情况下?现有方法依赖里程计,但会随着时间的推移产生累积误差(漂移)。传统的闭环检测方法在未探索区域不可用,而嵌入式平台的计算能力有限,难以支持复杂的定位算法。
核心思路:利用先验的粗略地理数据(高度图),通过匹配激光雷达获取的局部高度图的梯度信息,来校正里程计的漂移。这种方法不需要预先构建详细地图,并且计算量相对较小,适合在嵌入式平台上运行。
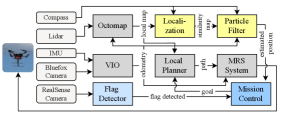
技术框架:该系统包含感知、建图、规划和控制四个主要模块。感知模块使用激光雷达获取环境信息,并生成局部高度图。建图模块维护一个先验的地理数据高度图。定位模块通过梯度模板匹配将局部高度图与先验高度图对齐,并使用聚类粒子滤波器融合里程计信息和梯度匹配结果,估计无人机的位置和姿态。规划模块根据当前位置和目标航点生成飞行轨迹。控制模块控制无人机按照规划的轨迹飞行。
关键创新:关键创新在于使用梯度模板匹配进行漂移校正。与直接匹配高度图相比,梯度匹配对光照变化和传感器噪声更加鲁棒。此外,使用聚类粒子滤波器可以有效地融合来自里程计和梯度匹配的信息,提高定位精度。
关键设计:梯度模板匹配使用互相关作为相似性度量,选择具有最高互相关值的位姿作为最佳匹配。聚类粒子滤波器使用K-means算法将粒子聚类成多个簇,并根据簇的权重更新粒子。系统在CPU上实时运行,优化了计算效率。
🖼️ 关键图片


📊 实验亮点
该系统在SPRIN-D Funke全自主飞行挑战赛中成功完成了公里级的飞行任务,证明了其在GNSS拒止环境下的导航能力。实验结果表明,该系统相对于原始里程计,显著降低了漂移,并且能够在仅使用CPU的硬件上实时运行。具体性能数据未在摘要中明确给出,但强调了其在实际复杂环境中的有效性。
🎯 应用场景
该研究成果可应用于GNSS拒止或受限环境下的无人机自主导航,例如室内导航、地下矿井勘探、城市峡谷环境下的物流配送、灾后救援等。该方法降低了对GNSS的依赖,提高了无人机在复杂环境中的可靠性和适应性,具有重要的实际应用价值。
📄 摘要(原文)
Reliable long-range flight of unmanned aerial vehicles (UAVs) in GNSS-denied environments is challenging: integrating odometry leads to drift, loop closures are unavailable in previously unseen areas and embedded platforms provide limited computational power. We present a fully onboard UAV system developed for the SPRIN-D Funke Fully Autonomous Flight Challenge, which required 9 km long-range waypoint navigation below 25 m AGL (Above Ground Level) without GNSS or prior dense mapping. The system integrates perception, mapping, planning, and control with a lightweight drift-correction method that matches LiDAR-derived local heightmaps to a prior geo-data heightmap via gradient-template matching and fuses the evidence with odometry in a clustered particle filter. Deployed during the competition, the system executed kilometer-scale flights across urban, forest, and open-field terrain and reduced drift substantially relative to raw odometry, while running in real time on CPU-only hardware. We describe the system architecture, the localization pipeline, and the competition evaluation, and we report practical insights from field deployment that inform the design of GNSS-denied UAV autonomy.