Prometheus: Universal, Open-Source Mocap-Based Teleoperation System with Force Feedback for Dataset Collection in Robot Learning
作者: S. Satsevich, A. Bazhenov, S. Egorov, A. Erkhov, M. Gromakov, A. Fedoseev, D. Tsetserukou
分类: cs.RO
发布日期: 2025-10-01
💡 一句话要点
Prometheus:基于动捕和力反馈的通用开源遥操作系统,用于机器人学习数据集收集
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 遥操作 力反馈 机器人学习 模仿学习 数据集收集
📋 核心要点
- 现有遥操作系统成本高昂,限制了大规模模仿学习数据集的构建。
- Prometheus 系统利用低成本的 HTC Vive Trackers 和定制力反馈控制器,实现经济高效的遥操作。
- 实验表明,该系统提高了任务成功率,为模仿学习数据收集提供了一种可行的低成本方案。
📝 摘要(中文)
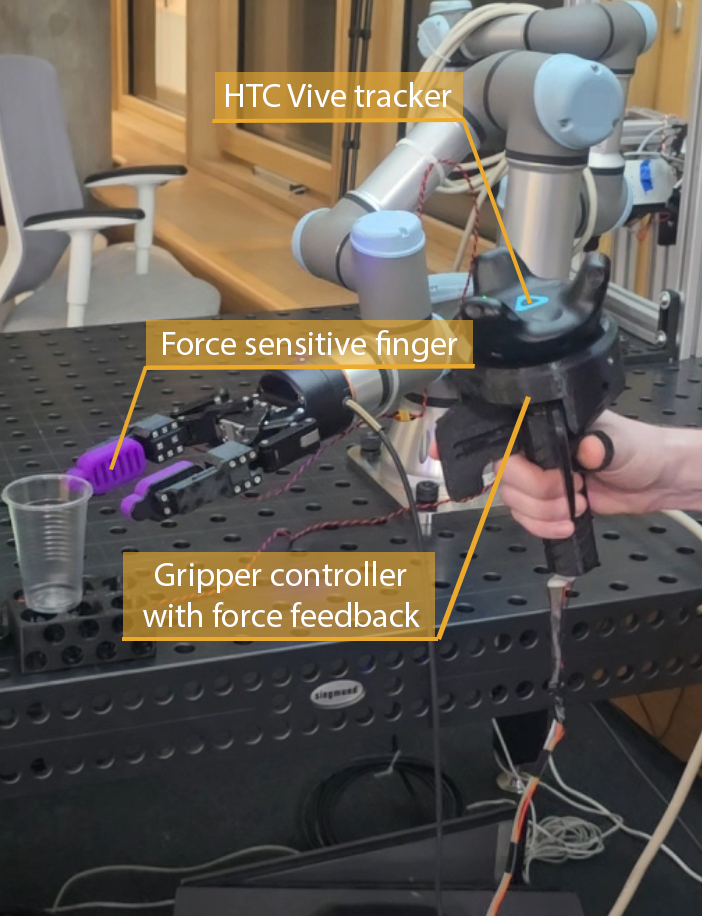
本文介绍了一种新型的具有力反馈的遥操作系统,该系统利用消费级的 HTC Vive Trackers 2.0。该系统集成了定制的控制器、UR3 机器人手臂和一个 Robotiq 夹爪,该夹爪配备了定制设计的指尖,以确保嵌入式力传感器上的压力分布均匀。实时压缩力数据被传输到控制器,使操作员能够感知施加到物体的抓取力。实验结果表明,该系统提高了任务成功率,并为大规模模仿学习数据收集提供了一种低成本的解决方案,同时不影响经济性。
🔬 方法详解
问题定义:论文旨在解决机器人学习中数据收集成本高昂的问题,特别是对于需要力反馈的复杂操作任务。现有的力反馈遥操作系统通常依赖于昂贵的专业设备,限制了其在研究和教育领域的普及,阻碍了大规模数据集的构建。
核心思路:论文的核心思路是利用低成本的消费级虚拟现实设备(HTC Vive Trackers)和定制的力反馈控制器,构建一个经济高效且易于使用的遥操作系统。通过将力反馈信息传递给操作员,提高操作的精确性和成功率,从而促进高质量模仿学习数据的收集。
技术框架:Prometheus 系统的整体架构包括以下几个主要模块:1) 操作员端:使用 HTC Vive Trackers 2.0 追踪操作员的运动,定制的控制器提供力反馈。2) 机器人端:UR3 机器人手臂执行操作,Robotiq 夹爪抓取物体。3) 力反馈系统:定制设计的夹爪指尖确保力传感器上的压力均匀分布,实时传输压缩力数据到操作员端。4) 通信系统:负责操作员端和机器人端之间的数据传输,保证实时性。
关键创新:该系统最重要的技术创新在于其低成本和通用性。通过巧妙地利用消费级 VR 设备和定制的力反馈控制器,显著降低了系统的成本,使其更易于部署和使用。此外,该系统具有通用性,可以应用于不同的机器人平台和操作任务。
关键设计:关键设计包括:1) 定制的力反馈控制器,能够将机器人端的力信息转化为操作员可感知的触觉反馈。2) 夹爪指尖的设计,确保力传感器上的压力分布均匀,提高力反馈的准确性。3) 实时通信协议,保证操作员端和机器人端之间的数据传输延迟足够低,从而实现流畅的遥操作体验。论文中未提及具体的参数设置、损失函数或网络结构等细节,这些可能是系统实现中的一些工程优化,但并非核心创新点。
🖼️ 关键图片


📊 实验亮点
实验结果表明,Prometheus 系统能够显著提高任务成功率。具体而言,使用该系统的操作员在抓取物体时能够更好地感知施加的力,从而避免过度用力或抓取不稳的情况。虽然论文中没有提供具体的性能数据和对比基线,但强调了该系统在提供低成本解决方案的同时,不影响任务的完成质量。
🎯 应用场景
该研究成果可广泛应用于机器人学习、远程操作、医疗康复等领域。在机器人学习中,该系统可用于生成高质量的模仿学习数据集,提升机器人的操作技能。在远程操作中,该系统可用于危险环境下的作业,如核电站维护、深海勘探等。在医疗康复领域,该系统可用于辅助患者进行精细动作训练,提高康复效果。
📄 摘要(原文)
This paper presents a novel teleoperation system with force feedback, utilizing consumer-grade HTC Vive Trackers 2.0. The system integrates a custom-built controller, a UR3 robotic arm, and a Robotiq gripper equipped with custom-designed fingers to ensure uniform pressure distribution on an embedded force sensor. Real-time compression force data is transmitted to the controller, enabling operators to perceive the gripping force applied to objects. Experimental results demonstrate that the system enhances task success rates and provides a low-cost solution for large-scale imitation learning data collection without compromising affordability.