Shared Object Manipulation with a Team of Collaborative Quadrupeds
作者: Shengzhi Wang, Niels Dehio, Xuanqi Zeng, Xian Yang, Lingwei Zhang, Yun-Hui Liu, K. W. Samuel Au
分类: cs.RO, cs.MA, eess.SY
发布日期: 2025-10-01
备注: 8 pages, 9 figures, submitted to The 2026 American Control Conference
💡 一句话要点
提出基于腿式机器人团队的共享物体操作方法,解决多机器人协作搬运问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多足机器人 协同操作 混合运动-力控制 力闭合抓取 机器人团队
📋 核心要点
- 传统多机械臂系统在处理大型物体时受工作空间限制,难以满足复杂环境下的搬运需求。
- 论文扩展了混合运动-力控制器,使多足机器人团队能够协同操作刚性物体,实现灵活高效的搬运。
- 通过仿真和真实实验验证,该方法能够有效协调机器人运动,实现稳定可靠的物体协同操作。
📝 摘要(中文)
本文提出了一种利用多足机器人团队处理大型物体的方案。相较于受限于工作空间的多机械臂系统,本文将经典的混合运动-力控制器扩展到腿式机器人操作团队,实现了力闭合抓取下的刚性物体协同操作。该方法允许机器人灵活地协调运动,从而实现高效、稳定的物体协同操作和运输。通过大量的仿真和真实实验验证了该方法的有效性。
🔬 方法详解
问题定义:论文旨在解决多足机器人团队如何协同操作和搬运刚性物体的问题。现有方法,特别是多机械臂系统,在大型或复杂环境中受到工作空间的限制,难以实现灵活高效的物体操作。因此,需要一种能够充分利用多足机器人运动灵活性的协同操作方法。
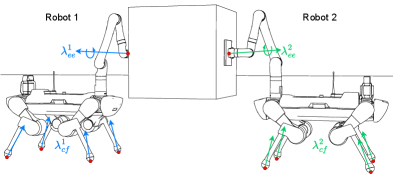
核心思路:论文的核心思路是将经典的混合运动-力控制器扩展到多足机器人团队。通过控制机器人的运动和作用力,实现对刚性物体的力闭合抓取和协同操作。这种方法允许机器人灵活地调整姿态和位置,从而适应不同的环境和任务需求。
技术框架:整体框架包含以下几个主要模块:1) 运动规划模块,负责生成每个机器人的运动轨迹;2) 力控制模块,负责控制机器人对物体的作用力,实现力闭合抓取;3) 混合运动-力控制器,将运动规划和力控制相结合,实现协同操作;4) 状态估计模块,用于估计物体和机器人的状态,为控制提供反馈。
关键创新:论文的关键创新在于将混合运动-力控制策略成功应用于多足机器人团队的协同操作。与传统的多机械臂系统相比,该方法充分利用了多足机器人的运动灵活性,能够在更复杂和受限的环境中进行物体操作。此外,该方法还考虑了力闭合抓取,保证了操作的稳定性和可靠性。
关键设计:在混合运动-力控制器中,需要仔细设计运动控制和力控制的权重,以平衡运动精度和力控制精度。力闭合抓取的实现依赖于对物体和机器人之间接触点的精确建模和控制。此外,状态估计模块的精度也对控制性能有重要影响。具体的参数设置和控制算法需要根据实际的机器人和环境进行调整。
🖼️ 关键图片

📊 实验亮点
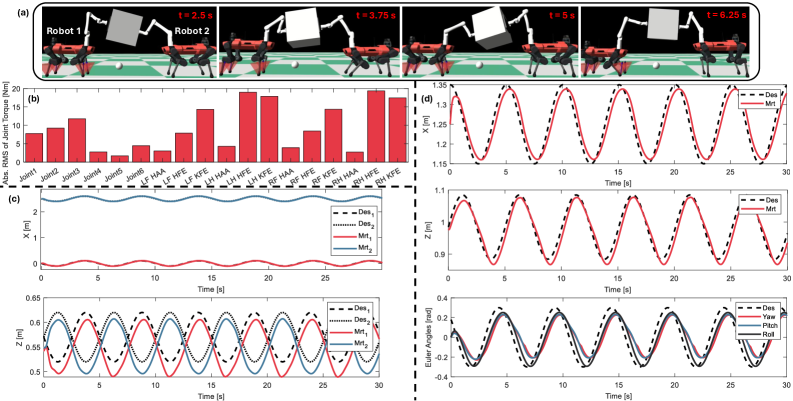
论文通过仿真和真实实验验证了所提出方法的有效性。实验结果表明,多足机器人团队能够稳定地协同搬运刚性物体,并能够适应不同的环境和任务需求。具体的性能数据(例如搬运速度、精度、稳定性等)在论文中进行了详细的展示和分析。
🎯 应用场景
该研究成果可应用于物流仓储、建筑工地、灾难救援等领域。多足机器人团队能够协同搬运重型或异形物体,提高工作效率和安全性。未来,该技术有望应用于更复杂的环境,例如崎岖地形或狭窄空间,实现更智能化的物体操作。
📄 摘要(原文)
Utilizing teams of multiple robots is advantageous for handling bulky objects. Many related works focus on multi-manipulator systems, which are limited by workspace constraints. In this paper, we extend a classical hybrid motion-force controller to a team of legged manipulator systems, enabling collaborative loco-manipulation of rigid objects with a force-closed grasp. Our novel approach allows the robots to flexibly coordinate their movements, achieving efficient and stable object co-manipulation and transport, validated through extensive simulations and real-world experiments.