RoboPilot: Generalizable Dynamic Robotic Manipulation with Dual-thinking Modes
作者: Xinyi Liu, Mohammadreza Fani Sani, Zewei Zhou, Julius Wirbel, Bahram Zarrin, Roberto Galeazzi
分类: cs.RO, cs.AI
发布日期: 2025-09-30
💡 一句话要点
RoboPilot:双重思考模式实现通用动态机器人操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人操作 动态环境 闭环控制 链式思考 任务规划 反馈机制 双重思考 RoboPilot-Bench
📋 核心要点
- 现有机器人操作方法通常采用开环模式,缺乏推理和反馈,导致对环境变化鲁棒性差,误差累积严重。
- RoboPilot采用双重思考闭环框架,结合原始动作、链式思考推理和反馈机制,实现动态环境下的自适应任务规划和动作生成。
- RoboPilot在RoboPilot-Bench基准测试中,任务成功率超越现有技术25.9%,并在真实工业机器人部署中验证了其鲁棒性。
📝 摘要(中文)
本文提出RoboPilot,一个双重思考的闭环机器人操作框架,支持在真实动态环境中进行复杂任务的自适应推理。RoboPilot利用原始动作进行结构化任务规划和灵活的动作生成,同时引入反馈机制,以便从动态变化和执行错误中进行重新规划。链式思考推理进一步增强了高层任务规划并指导低层动作生成。该系统动态地在快速和慢速思考之间切换,以平衡效率和准确性。为了系统地评估RoboPilot在各种机器人操作场景中的鲁棒性,我们引入了RoboPilot-Bench,一个涵盖10个类别共21个任务的基准,包括不可行任务识别和故障恢复。实验表明,RoboPilot在任务成功率方面优于最先进的基线25.9%,并且在工业机器人上的实际部署进一步证明了其在真实环境中的鲁棒性。
🔬 方法详解
问题定义:现有机器人操作方法在复杂或长时程任务中面临挑战,主要原因是缺乏足够的推理能力和闭环反馈机制,导致对环境变化的适应性差,容易出现误差累积。现有的开环控制策略难以应对真实世界动态环境中的各种不确定性因素。
核心思路:RoboPilot的核心思路是引入双重思考模式,结合结构化任务规划、灵活动作生成和闭环反馈机制,从而提高机器人操作的鲁棒性和泛化能力。通过链式思考推理增强高层任务规划,并指导低层动作生成,同时利用反馈信息进行动态调整和重新规划。
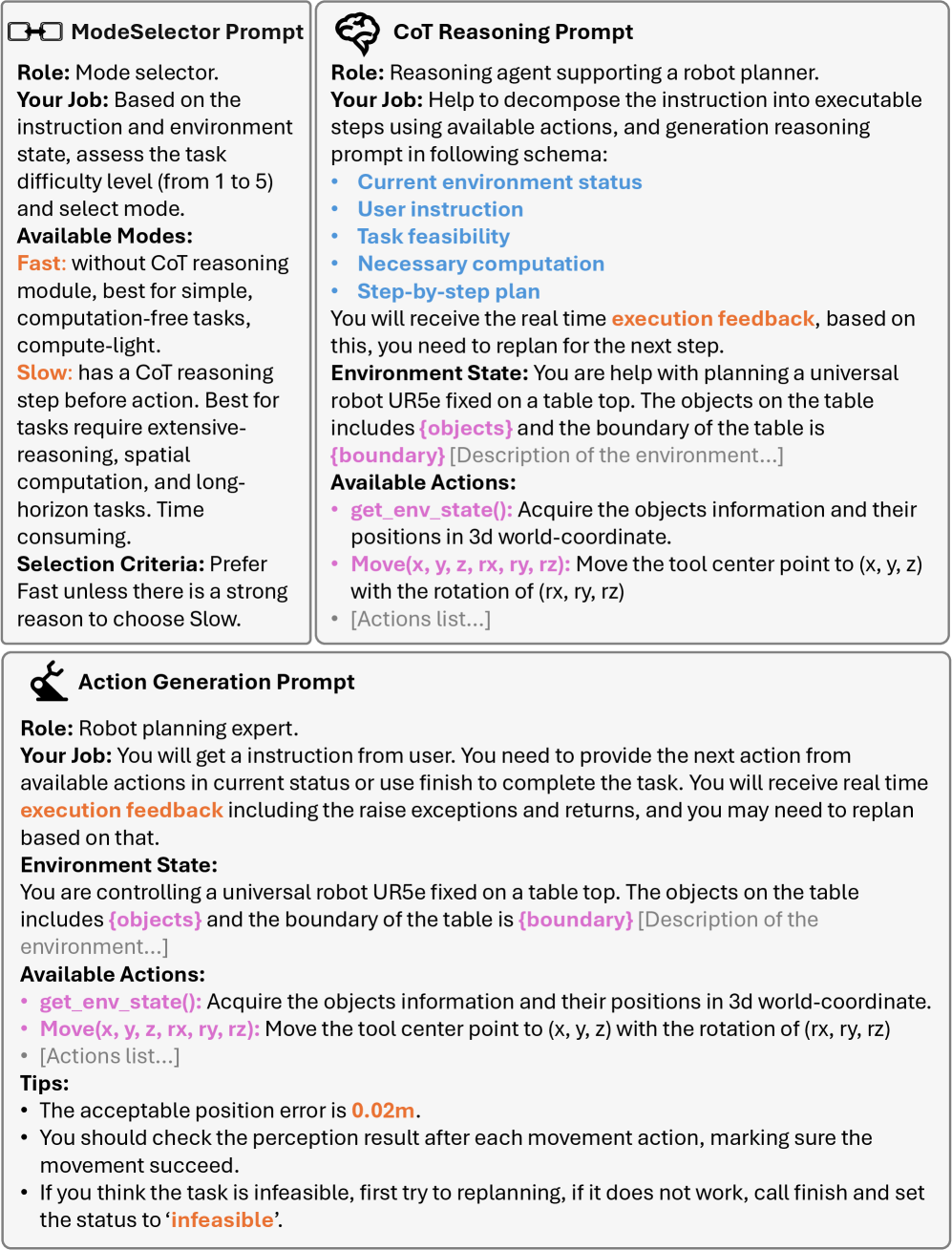
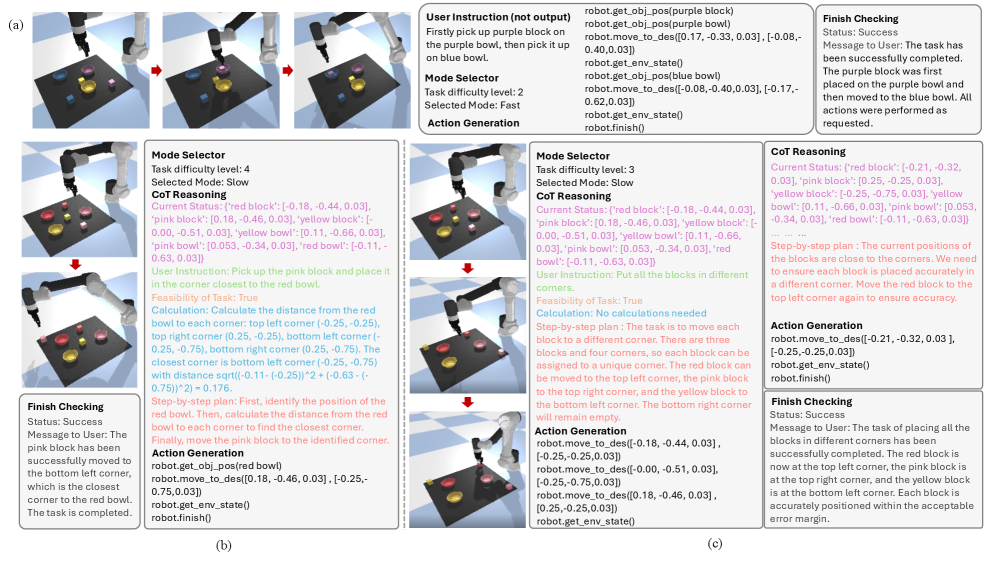
技术框架:RoboPilot框架包含以下主要模块:1) 原始动作库:定义了一组基本的机器人动作单元。2) 任务规划器:利用链式思考推理进行高层任务规划,生成动作序列。3) 动作生成器:根据任务规划结果,生成具体的机器人动作指令。4) 执行器:执行生成的动作指令。5) 状态监测器:监测环境和机器人的状态,并提供反馈信息。6) 重新规划器:根据反馈信息,对任务规划进行动态调整。系统在快速思考(快速执行)和慢速思考(详细规划)之间动态切换,以平衡效率和准确性。
关键创新:RoboPilot的关键创新在于其双重思考模式和闭环反馈机制。双重思考模式允许系统在高层进行更深入的推理和规划,同时在低层快速执行动作。闭环反馈机制则使得系统能够及时感知环境变化和执行错误,并进行动态调整和重新规划。此外,RoboPilot-Bench基准测试的提出也为机器人操作领域的研究提供了一个系统性的评估平台。
关键设计:RoboPilot的具体实现细节未知,论文中可能未详细公开。但可以推测,任务规划器可能采用了某种形式的强化学习或搜索算法,动作生成器可能使用了深度神经网络进行参数化控制。状态监测器可能依赖于视觉传感器和力/扭矩传感器。重新规划器可能基于规则或学习算法,根据反馈信息调整任务规划。
🖼️ 关键图片

📊 实验亮点
RoboPilot在RoboPilot-Bench基准测试中表现出色,在21个任务中,任务成功率比最先进的基线提高了25.9%。此外,RoboPilot还在真实工业机器人上进行了部署,验证了其在真实环境中的鲁棒性和泛化能力。这些实验结果表明,RoboPilot是一种有效的机器人操作框架,具有很强的实用价值。
🎯 应用场景
RoboPilot具有广泛的应用前景,可应用于工业自动化、物流、医疗、家庭服务等领域。例如,在工业自动化中,RoboPilot可以用于执行复杂的装配、搬运和检测任务。在医疗领域,它可以辅助医生进行手术或康复训练。在家庭服务领域,它可以帮助人们完成日常家务,提高生活质量。该研究有望推动机器人技术在实际场景中的应用。
📄 摘要(原文)
Despite rapid progress in autonomous robotics, executing complex or long-horizon tasks remains a fundamental challenge. Most current approaches follow an open-loop paradigm with limited reasoning and no feedback, resulting in poor robustness to environmental changes and severe error accumulation. We present RoboPilot, a dual-thinking closed-loop framework for robotic manipulation that supports adaptive reasoning for complex tasks in real-world dynamic environments. RoboPilot leverages primitive actions for structured task planning and flexible action generation, while introducing feedback to enable replanning from dynamic changes and execution errors. Chain-of-Thought reasoning further enhances high-level task planning and guides low-level action generation. The system dynamically switches between fast and slow thinking to balance efficiency and accuracy. To systematically evaluate the robustness of RoboPilot in diverse robot manipulation scenarios, we introduce RoboPilot-Bench, a benchmark spanning 21 tasks across 10 categories, including infeasible-task recognition and failure recovery. Experiments show that RoboPilot outperforms state-of-the-art baselines by 25.9\% in task success rate, and the real-world deployment on an industrial robot further demonstrates its robustness in real-world settings.