Anomaly detection for generic failure monitoring in robotic assembly, screwing and manipulation
作者: Niklas Grambow, Lisa-Marie Fenner, Felipe Kempkes, Philip Hotz, Dingyuan Wan, Jörg Krüger, Kevin Haninger
分类: cs.RO
发布日期: 2025-09-30 (更新: 2026-01-09)
💡 一句话要点
提出基于自编码器的通用异常检测方法,用于机器人装配、拧螺丝和操作中的故障监控。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 异常检测 机器人操作 自编码器 时序数据 故障监控
📋 核心要点
- 现有机器人异常检测方法缺乏跨任务和控制策略的通用性,限制了其在复杂工业场景的应用。
- 利用机器人操作中的力/扭矩时序数据,结合自编码器进行异常检测,实现对机器人与环境交互的有效监控。
- 在机器人布线、拧螺丝和打磨等任务中验证了该方法的有效性,AUROC最高可达0.96,展示了良好的故障检测能力。
📝 摘要(中文)
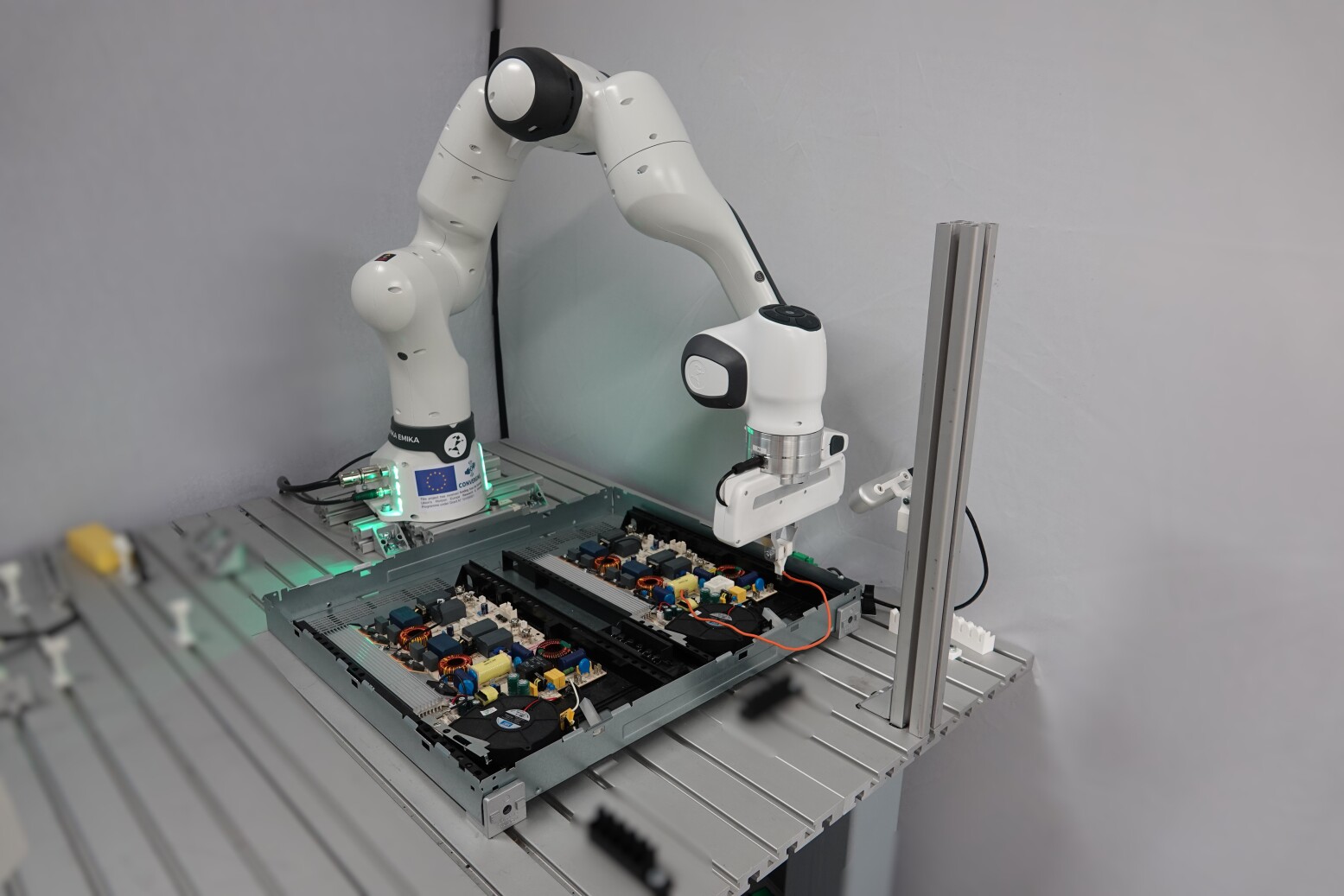
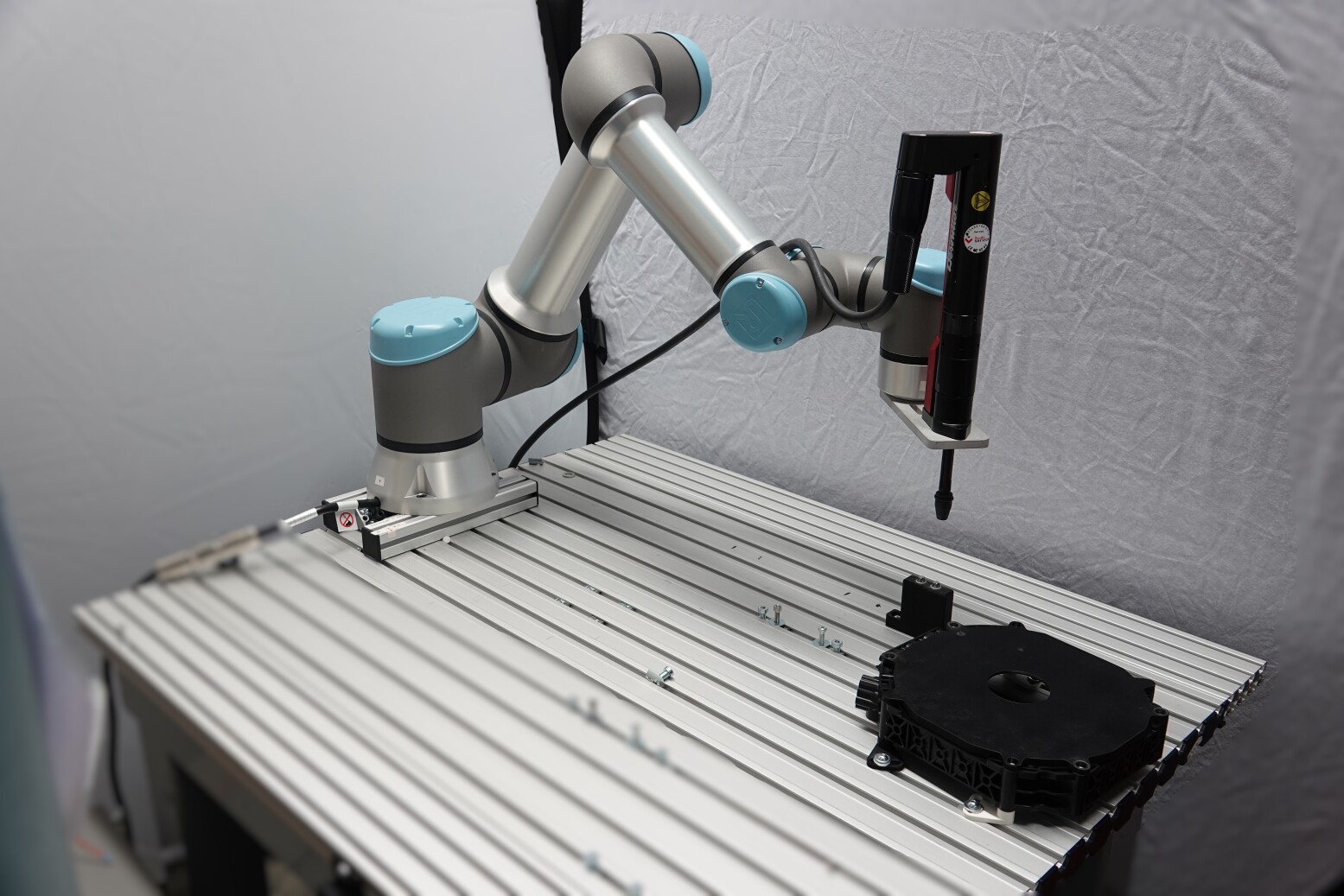
机器人操作中超出分布的状态常导致不可预测的行为或任务失败,降低成功率并增加损坏风险。异常检测(AD)可以识别数据中偏离预期模式的偏差,用于触发安全行为和恢复策略。先前工作已将数据驱动的AD应用于特定机器人任务的时序数据,但AD方法在不同机器人控制策略和任务类型之间的可迁移性尚未得到证实。利用力/扭矩信号等时序数据可以直接捕获机器人与环境的交互,这对于操作和在线故障检测至关重要。它们广泛的可用性、高采样率和低维度实现了高时间分辨率和高效处理。由于机器人任务可能具有广泛的信号特征和要求,因此需要可以以相同方式应用于各种任务的AD方法,理想情况下具有良好的数据效率。我们研究了三个工业任务,每个任务都存在多个异常。构建了机器人布线、拧螺丝和打磨的测试场景,并收集了多模态时序数据。比较了几种基于自编码器的方法,并评估了不同任务和控制方法(扩散策略、位置和阻抗控制)之间的泛化能力。这使我们能够验证AD在涉及更严格的公差以及来自机器人及其环境的变化的复杂任务中的集成。此外,我们评估了数据效率、检测延迟和支持稳健检测的任务特征。结果表明,在布线和拧螺丝任务中,对于不正确或未对准的零件等故障,AUROC高于0.96,检测可靠。在抛光任务中,只有严重的故障才能被可靠地检测到,而更细微的故障仍然未被检测到。
🔬 方法详解
问题定义:论文旨在解决机器人操作过程中,由于超出预期状态导致的故障检测问题。现有方法通常针对特定任务和控制策略设计,缺乏通用性和泛化能力,难以适应复杂多变的工业环境。此外,现有方法对细微故障的检测能力有限,容易造成潜在的安全隐患。
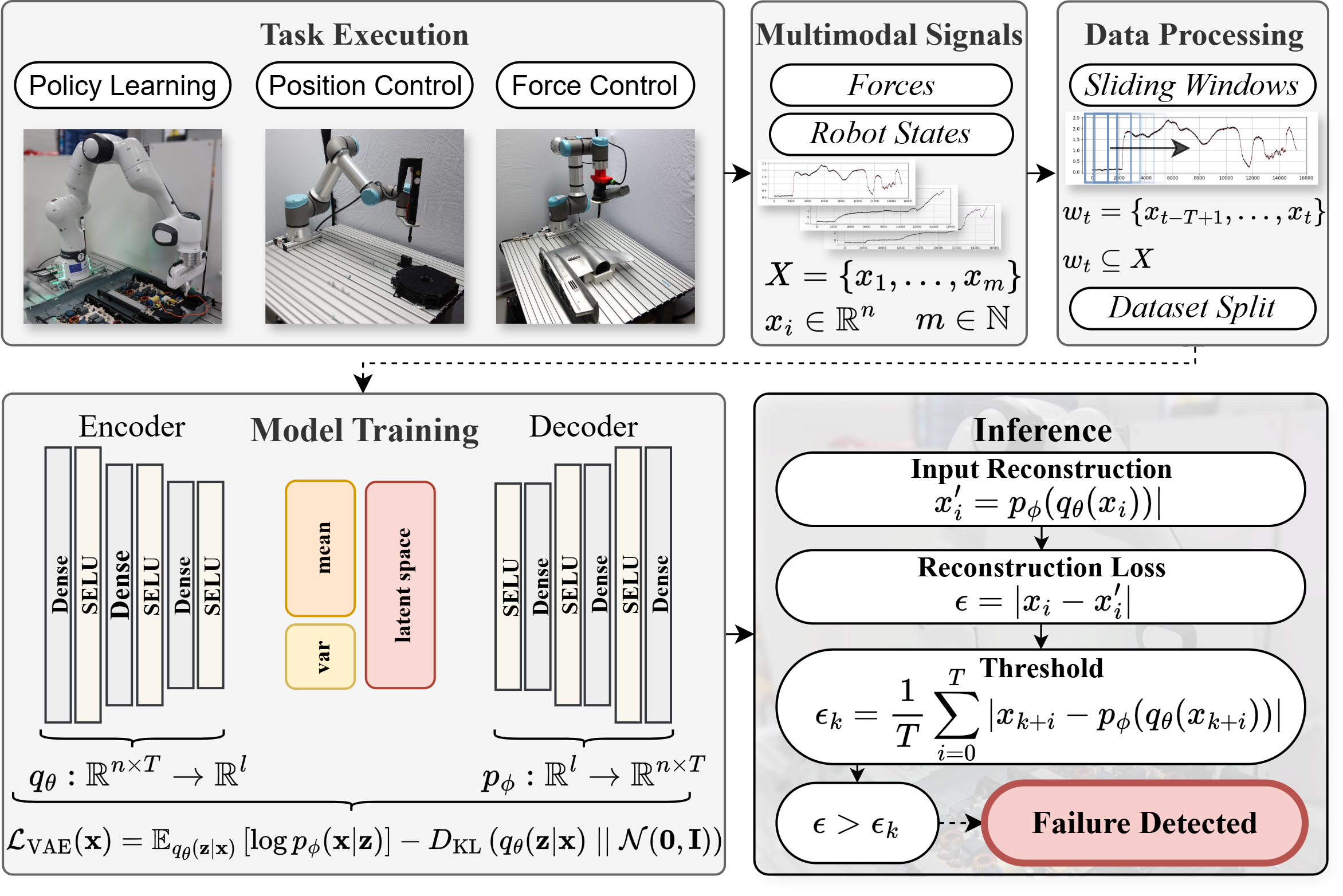
核心思路:论文的核心思路是利用机器人操作过程中产生的力/扭矩时序数据,通过自编码器学习正常操作模式的特征表示。当机器人出现异常操作时,其力/扭矩数据会偏离正常模式,导致自编码器的重构误差增大,从而实现异常检测。这种方法不依赖于特定的任务和控制策略,具有较强的通用性。
技术框架:整体框架包括数据采集、数据预处理、模型训练和异常检测四个阶段。首先,通过力/扭矩传感器采集机器人操作过程中的时序数据。然后,对数据进行预处理,包括降噪、归一化等操作。接着,使用自编码器模型对预处理后的数据进行训练,学习正常操作模式的特征表示。最后,通过计算重构误差来判断是否存在异常,并设置阈值来区分正常和异常状态。
关键创新:论文的关键创新在于提出了一种基于自编码器的通用异常检测方法,该方法不依赖于特定的任务和控制策略,具有较强的通用性和泛化能力。此外,论文还通过实验验证了该方法在不同工业任务中的有效性,并分析了影响检测性能的关键因素。
关键设计:论文采用了多种自编码器结构,包括标准自编码器、变分自编码器等,并比较了它们在不同任务中的性能。损失函数主要采用均方误差(MSE)或交叉熵损失函数。为了提高检测精度,论文还采用了滑动窗口技术,将时序数据分割成多个窗口,并对每个窗口进行异常检测。此外,论文还对阈值的选择进行了优化,以平衡检测精度和误报率。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在机器人布线和拧螺丝任务中取得了良好的检测效果,AUROC值均高于0.96,表明该方法能够有效检测出不正确或未对准的零件等故障。然而,在抛光任务中,该方法只能可靠地检测到严重的故障,而对于更细微的故障则难以检测。这表明该方法的检测性能受到任务复杂度和数据质量的影响。
🎯 应用场景
该研究成果可广泛应用于工业机器人自动化生产线,实现对机器人操作过程的实时监控和故障预警。通过及时发现异常操作,可以避免设备损坏、产品质量下降等问题,提高生产效率和安全性。此外,该方法还可以应用于其他领域的异常检测,如智能交通、医疗诊断等。
📄 摘要(原文)
Out-of-distribution states in robot manipulation often lead to unpredictable robot behavior or task failure, limiting success rates and increasing risk of damage. Anomaly detection (AD) can identify deviations from expected patterns in data, which can be used to trigger failsafe behaviors and recovery strategies. Prior work has applied data-driven AD on time series data for specific robotic tasks, however the transferability of an AD approach between different robot control strategies and task types has not been shown. Leveraging time series data, such as force/torque signals, allows to directly capture robot-environment interactions, crucial for manipulation and online failure detection. Their broad availability, high sampling rates, and low dimensionality enable high temporal resolution and efficient processing. As robotic tasks can have widely signal characteristics and requirements, AD methods which can be applied in the same way to a wide range of tasks is needed, ideally with good data efficiency. We examine three industrial tasks, each presenting several anomalies. Test scenarios in robotic cabling, screwing, and sanding are built, and multi-modal time series data is gathered. Several autoencoder-based methods are compared, and we evaluate the generalization across different tasks and control methods (diffusion policy-, position-, and impedance-controlled). This allows us to validate the integration of AD in complex tasks involving tighter tolerances and variation from both the robot and its environment. Additionally, we evaluate data efficiency, detection latency, and task characteristics which support robust detection. The results indicate reliable detection with AUROC above 0.96 in failures in the cabling and screwing task, such as incorrect or misaligned parts. In the polishing task, only severe failures were reliably detected, while more subtle failures remained undetected.