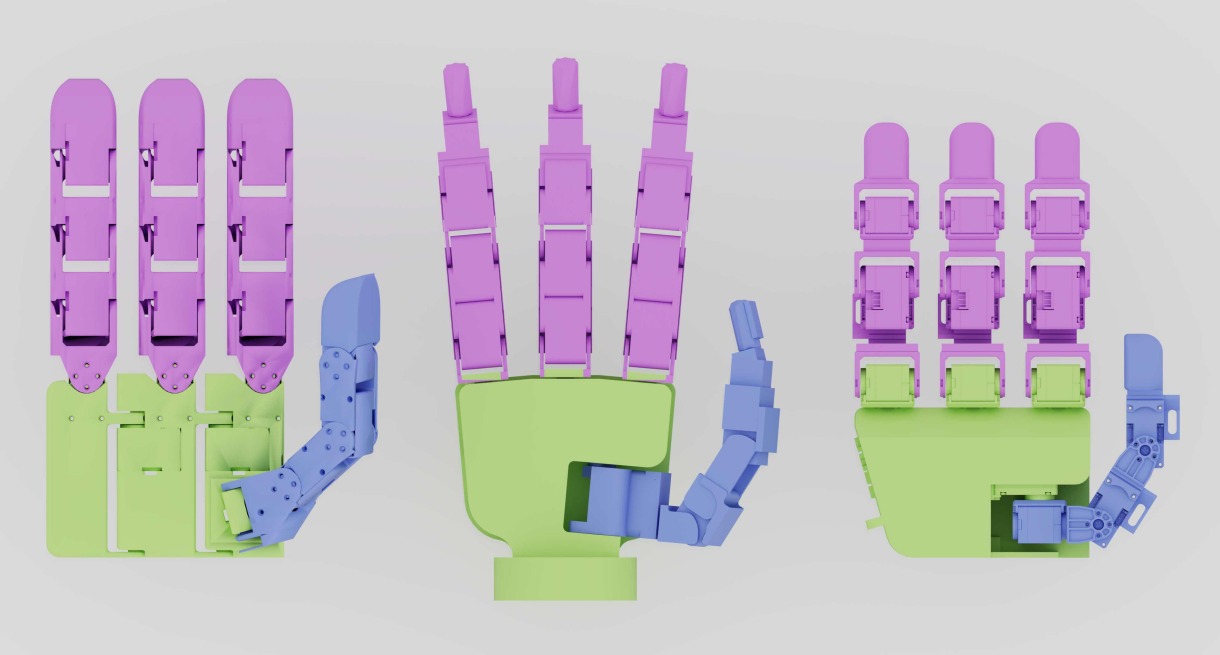
ISyHand: A Dexterous Multi-finger Robot Hand with an Articulated Palm
作者: Benjamin A. Richardson, Felix Grüninger, Lukas Mack, Joerg Stueckler, Katherine J. Kuchenbecker
分类: cs.RO
发布日期: 2025-09-30
备注: Accepted at IEEE Humanoids 2025
💡 一句话要点
ISyHand:一种具有铰接掌部的灵巧多指机器人手
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 灵巧手 机器人手 铰接掌部 强化学习 机器人操作
📋 核心要点
- 现有灵巧手设计通常在拟人化和灵巧性之间做出妥协,难以兼顾低成本和易制造性。
- ISyHand通过创新的铰接掌部设计,在牺牲少量拟人化的前提下,显著提升了机器人的灵巧操作能力。
- 实验证明,ISyHand在模拟和真实环境中均能有效执行掌内操作任务,验证了铰接掌部设计的有效性。
📝 摘要(中文)
人型机器人和定制化制造解决方案的快速发展,将灵巧操作推到了现代机器人技术的前沿。过去十年中,市场上出现了一些昂贵的灵巧手,但硬件设计(尤其是在伺服电机和3D打印方面)的进步,最近促进了更便宜的开源手的蓬勃发展。大多数手都是拟人化的,以便使用标准的人类工具,而提高灵巧性的尝试往往会牺牲拟人化。我们介绍了开源的ISyHand(发音为easy-hand),这是一种高度灵巧、低成本、易于制造、基于关节伺服驱动的机器人手。我们的手使用现成的Dynamixel电机、紧固件和3D打印部件,可以在四小时内组装完成,总材料成本约为1300美元。ISyHand独特的铰接掌部设计提高了整体灵巧性,而对拟人化的牺牲很小。为了证明铰接掌部的效用,我们使用强化学习在模拟中训练该手执行经典的掌内操作任务:立方体重定向。我们新颖的系统实验表明,模拟的ISyHand在早期训练阶段优于两个最可比较的手,所有三个手在策略收敛后表现相似,并且ISyHand明显优于其自身设计的固定掌部版本。此外,我们在真实的手上部署了在立方体重定向上训练的策略,证明了其执行真实世界灵巧操作的能力。
🔬 方法详解
问题定义:现有灵巧手设计面临着拟人化、灵巧性、成本和易制造性之间的权衡问题。许多现有的灵巧手要么价格昂贵,要么难以制造,要么在灵巧性方面有所欠缺。此外,如何在保证一定程度拟人化的前提下,进一步提升灵巧操作能力是一个挑战。
核心思路:ISyHand的核心思路是通过引入一个铰接掌部来增加手的自由度,从而提升灵巧性。铰接掌部允许手在操作过程中进行额外的调整和适应,从而更好地完成复杂的操作任务。同时,该设计尽可能地采用低成本、易于获取的材料和部件,并采用3D打印技术,以降低制造成本和复杂度。
技术框架:ISyHand的整体架构包括五个手指和一个铰接掌部。每个手指由多个关节组成,并由Dynamixel伺服电机驱动。掌部也由伺服电机驱动,可以进行旋转和倾斜运动。整个手的设计采用模块化方法,方便组装和维护。控制系统使用强化学习算法,在模拟环境中训练手的操作策略,然后将训练好的策略部署到真实的手上。
关键创新:ISyHand最重要的技术创新点在于其铰接掌部设计。与传统的固定掌部机器人手相比,铰接掌部可以提供更大的操作空间和更高的灵活性,从而显著提升灵巧操作能力。此外,该设计在保证灵巧性的同时,尽可能地降低了成本和复杂度,使其更易于制造和使用。
关键设计:ISyHand的关键设计包括:1) 采用Dynamixel伺服电机作为关节驱动器,具有较高的精度和可靠性;2) 使用3D打印技术制造大部分零件,降低了制造成本和复杂度;3) 铰接掌部的运动范围和自由度经过精心设计,以最大化操作空间和灵活性;4) 使用强化学习算法训练手的操作策略,以实现高效的灵巧操作。
🖼️ 关键图片


📊 实验亮点
实验结果表明,在模拟环境中,ISyHand在早期训练阶段优于两个最可比较的手,并且明显优于其自身设计的固定掌部版本。在真实环境中,ISyHand成功地执行了立方体重定向任务,验证了其在真实世界中进行灵巧操作的能力。这些结果表明,铰接掌部设计能够显著提升机器人手的灵巧操作能力。
🎯 应用场景
ISyHand具有广泛的应用前景,包括:1) 人型机器人:作为人型机器人的重要组成部分,用于执行各种复杂的任务;2) 定制化制造:用于自动化生产线上的精细操作,提高生产效率和质量;3) 远程操作:用于在危险或难以到达的环境中进行操作,如核电站维护、深海勘探等;4) 康复机器人:辅助残疾人进行日常生活活动,提高生活质量。
📄 摘要(原文)
The rapid increase in the development of humanoid robots and customized manufacturing solutions has brought dexterous manipulation to the forefront of modern robotics. Over the past decade, several expensive dexterous hands have come to market, but advances in hardware design, particularly in servo motors and 3D printing, have recently facilitated an explosion of cheaper open-source hands. Most hands are anthropomorphic to allow use of standard human tools, and attempts to increase dexterity often sacrifice anthropomorphism. We introduce the open-source ISyHand (pronounced easy-hand), a highly dexterous, low-cost, easy-to-manufacture, on-joint servo-driven robot hand. Our hand uses off-the-shelf Dynamixel motors, fasteners, and 3D-printed parts, can be assembled within four hours, and has a total material cost of about 1,300 USD. The ISyHands's unique articulated-palm design increases overall dexterity with only a modest sacrifice in anthropomorphism. To demonstrate the utility of the articulated palm, we use reinforcement learning in simulation to train the hand to perform a classical in-hand manipulation task: cube reorientation. Our novel, systematic experiments show that the simulated ISyHand outperforms the two most comparable hands in early training phases, that all three perform similarly well after policy convergence, and that the ISyHand significantly outperforms a fixed-palm version of its own design. Additionally, we deploy a policy trained on cube reorientation on the real hand, demonstrating its ability to perform real-world dexterous manipulation.