State Estimation for Compliant and Morphologically Adaptive Robots
作者: Valentin Yuryev, Max Polzin, Josie Hughes
分类: cs.RO
发布日期: 2025-09-30 (更新: 2025-10-01)
备注: 8 pages, 10 figures, 1 table, preprint
💡 一句话要点
针对柔顺和形态自适应机器人,提出一种基于神经网络的状态估计方法。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 状态估计 柔顺机器人 形态自适应 神经网络 运动控制
📋 核心要点
- 柔顺和形态自适应机器人因其在复杂环境中的鲁棒性而备受关注,但传统刚体状态估计方法难以应对其形变。
- 论文提出一种基于神经网络的状态估计器,融合历史状态信息,并能校正不可靠传感器数据,适用于柔顺机器人的状态估计。
- 实验表明,该方法在GOAT机器人上表现出色,显著提升了状态估计精度,并在电机故障情况下提高了自主导航能力。
📝 摘要(中文)
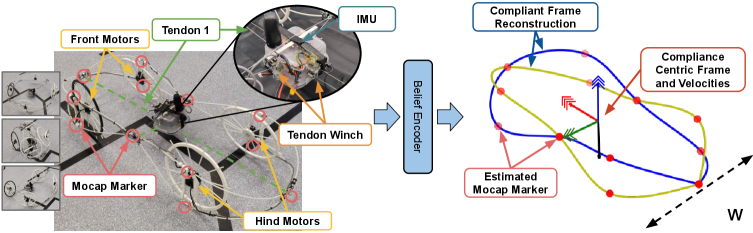
具有主动或被动柔顺性的移动机器人,在不确定环境中表现出鲁棒性,这在农业、研究和环境等行业中具有应用前景。然而,由于缺乏刚体假设以及形态变化引起的运动学改变,此类机器人的状态估计具有挑战性。本文提出了一种方法,用于估计典型的刚体状态以及与柔顺性相关的状态,例如不同形态和运动模式下软机器人的形状。我们基于神经网络的状态估计器使用历史状态和一个机制来直接影响不可靠的传感器。我们在GOAT平台上测试了我们的框架,该机器人能够进行被动柔顺和主动变形,以适应极端的户外地形。该网络在一个以柔顺性为中心的框架中,利用运动捕捉数据进行训练,该框架考虑了与变形相关的状态。我们的方法预测的形状相关测量值在机器人尺寸的4.2%以内,速度在线性速度的6.3%和角速度的2.4%以内,方向在1.5度以内。我们还展示了,当使用我们的估计器进行闭环自主户外操作时,电机故障期间的行驶里程增加了300%。
🔬 方法详解
问题定义:论文旨在解决柔顺和形态自适应机器人的状态估计问题。传统的状态估计方法依赖于刚体假设,无法准确描述此类机器人的形变和运动学变化。此外,传感器数据可能存在噪声和不确定性,进一步加剧了状态估计的难度。
核心思路:论文的核心思路是利用神经网络学习柔顺机器人的状态空间表示,并结合历史状态信息和传感器数据校正机制,实现高精度的状态估计。通过将柔顺性相关的状态(如形状)纳入状态向量,并使用运动捕捉数据进行训练,网络能够学习到机器人形变与状态之间的关系。
技术框架:该状态估计框架主要包含以下几个模块:1)数据采集模块:从机器人上的传感器(如IMU、编码器等)获取数据,并记录历史状态信息。2)神经网络状态估计器:该模块是核心,接收传感器数据和历史状态作为输入,输出当前时刻的状态估计。3)传感器校正机制:用于识别和校正不可靠的传感器数据,提高状态估计的鲁棒性。4)运动控制模块:根据状态估计结果,控制机器人的运动。
关键创新:该方法的关键创新在于:1)提出了一个以柔顺性为中心的框架,能够同时估计刚体状态和柔顺性相关的状态。2)设计了一种基于神经网络的状态估计器,能够学习柔顺机器人的复杂运动学模型。3)引入了一种传感器校正机制,提高了状态估计的鲁棒性。
关键设计:神经网络的具体结构未知,但可以推测其可能采用循环神经网络(RNN)或Transformer等结构,以处理时间序列数据。损失函数的设计可能包括状态估计误差、形状预测误差等。训练数据来自运动捕捉系统,并以柔顺性为中心进行标注,包含了机器人的形状、位置、姿态等信息。传感器校正机制的具体实现方式未知,可能采用卡尔曼滤波或类似的滤波算法。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法能够以较高的精度估计柔顺机器人的状态,形状相关测量值误差在机器人尺寸的4.2%以内,速度误差在线性速度的6.3%和角速度的2.4%以内,方向误差在1.5度以内。此外,在电机故障情况下,使用该状态估计器进行闭环控制,机器人的行驶里程提高了300%。
🎯 应用场景
该研究成果可应用于农业、搜救、勘探等领域,提升柔顺机器人在复杂环境下的自主导航和操作能力。例如,在农业领域,可用于果蔬采摘机器人,使其能够适应不同形状和大小的果实;在搜救领域,可用于灾后救援机器人,使其能够穿越废墟等复杂地形。未来,该技术有望推动柔顺机器人在更多领域的应用。
📄 摘要(原文)
Locomotion robots with active or passive compliance can show robustness to uncertain scenarios, which can be promising for agricultural, research and environmental industries. However, state estimation for these robots is challenging due to the lack of rigid-body assumptions and kinematic changes from morphing. We propose a method to estimate typical rigid-body states alongside compliance-related states, such as soft robot shape in different morphologies and locomotion modes. Our neural network-based state estimator uses a history of states and a mechanism to directly influence unreliable sensors. We test our framework on the GOAT platform, a robot capable of passive compliance and active morphing for extreme outdoor terrain. The network is trained on motion capture data in a novel compliance-centric frame that accounts for morphing-related states. Our method predicts shape-related measurements within 4.2% of the robot's size, velocities within 6.3% and 2.4% of the top linear and angular speeds, respectively, and orientation within 1.5 degrees. We also demonstrate a 300% increase in travel range during a motor malfunction when using our estimator for closed-loop autonomous outdoor operation.