Trajectory Prediction via Bayesian Intention Inference under Unknown Goals and Kinematics
作者: Shunan Yin, Zehui Lu, Shaoshuai Mou
分类: cs.RO
发布日期: 2025-09-29
💡 一句话要点
提出一种自适应贝叶斯算法,用于未知目标和运动学条件下的实时轨迹预测。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 轨迹预测 意图推断 贝叶斯算法 自适应系统 机器人导航
📋 核心要点
- 现有轨迹预测方法难以应对目标意图突变和运动特性未知的情况,鲁棒性不足。
- 提出一种自适应贝叶斯算法,联合估计目标的意图和运动参数,实现对动态变化的适应。
- 实验表明,该方法在四旋翼和四足机器人平台上表现出色,优于其他自适应方法,且无需训练。
📝 摘要(中文)
本文提出了一种自适应贝叶斯算法,用于通过意图推断进行实时轨迹预测,其中目标的意图和运动特征是未知的且可能发生变化。该方法同时估计两个关键变量:目标当前的意图(建模为马尔可夫潜在状态)以及描述目标遵循最短路径策略的意图参数。通过整合这种联合更新技术,该算法能够保持对突发意图转变和未知运动动态的鲁棒性。然后,一种基于采样的轨迹预测机制利用这些自适应估计来生成具有量化不确定性的概率预测。我们通过数值实验(两个案例的消融研究和一个500次试验的蒙特卡罗分析)以及四旋翼和四足机器人的硬件演示验证了该框架。实验结果表明,所提出的方法明显优于非自适应和部分自适应方法。该方法以约270 Hz的实时频率运行,无需训练或目标行为的详细先验知识,展示了其在各种机器人系统中的适用性。
🔬 方法详解
问题定义:现有的轨迹预测方法在处理目标意图未知、运动学特性未知且可能随时间变化的情况下,往往表现出鲁棒性不足的问题。这些方法通常依赖于预先设定的运动模型或需要大量的训练数据,难以适应真实世界中复杂多变的场景。因此,如何在未知目标和运动学条件下,实现准确、实时的轨迹预测是一个重要的挑战。
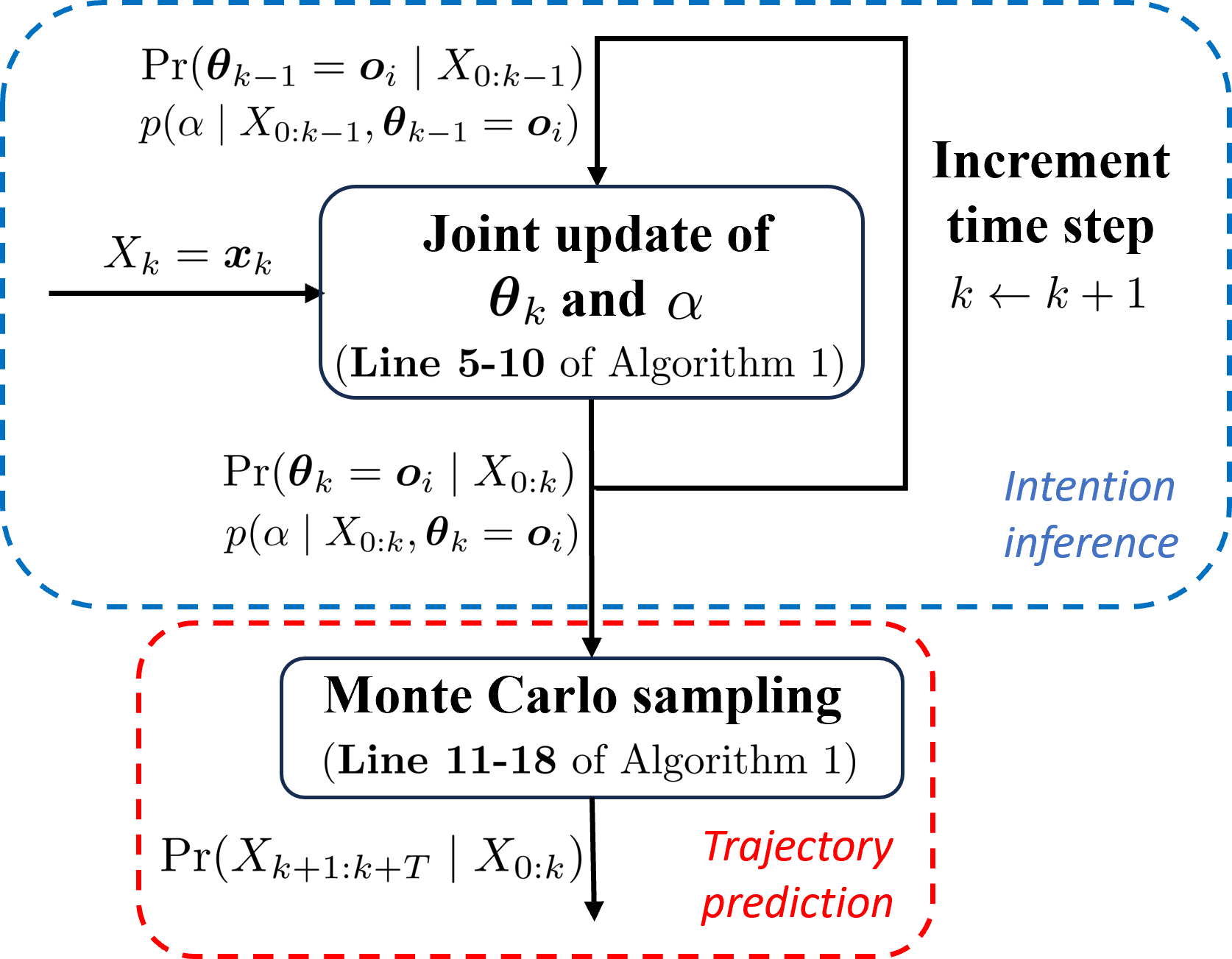
核心思路:本文的核心思路是利用贝叶斯推断框架,同时估计目标的意图和运动参数。将目标的意图建模为马尔可夫潜在状态,并引入一个意图参数来描述目标遵循最短路径策略的程度。通过联合更新这两个变量,算法能够自适应地跟踪目标的意图变化和运动动态,从而提高轨迹预测的准确性和鲁棒性。
技术框架:该方法主要包含以下几个模块:1) 状态估计模块:利用贝叶斯滤波器(如粒子滤波器)来估计目标的当前状态,包括位置、速度等。2) 意图推断模块:基于观测到的目标运动轨迹,推断目标的意图(即目标要到达的终点)。3) 运动参数估计模块:估计目标的运动参数,如速度偏好、路径规划策略等。4) 轨迹预测模块:基于估计的意图和运动参数,生成未来轨迹的概率分布。
关键创新:该方法最重要的创新点在于其自适应性。通过联合估计目标的意图和运动参数,算法能够动态地适应目标的行为变化,而无需预先知道目标的详细信息。这种自适应性使得该方法在处理复杂、动态的场景时具有更强的鲁棒性。
关键设计:在具体实现上,该方法采用了马尔可夫链来建模目标的意图变化,并使用粒子滤波器来进行状态估计和意图推断。意图参数的更新采用贝叶斯更新规则,根据观测到的轨迹来调整参数的概率分布。轨迹预测模块则利用采样方法,从估计的意图和运动参数的概率分布中生成多个可能的未来轨迹,从而得到轨迹预测的概率分布。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在轨迹预测精度上显著优于非自适应和部分自适应方法。在四旋翼和四足机器人平台上进行的硬件演示验证了该方法的实时性和有效性。该方法能够在约270 Hz的频率下实时运行,且无需训练或目标行为的详细先验知识。
🎯 应用场景
该研究成果可广泛应用于机器人导航、自动驾驶、智能监控等领域。例如,在自动驾驶中,该方法可以帮助车辆预测行人的运动轨迹,从而做出更安全的决策。在机器人导航中,该方法可以帮助机器人更好地理解人类的意图,从而实现更自然的人机交互。此外,该方法还可以应用于智能监控系统中,用于预测目标的行为,从而提高安全预警的准确性。
📄 摘要(原文)
This work introduces an adaptive Bayesian algorithm for real-time trajectory prediction via intention inference, where a target's intentions and motion characteristics are unknown and subject to change. The method concurrently estimates two critical variables: the target's current intention, modeled as a Markovian latent state, and an intention parameter that describes the target's adherence to a shortest-path policy. By integrating this joint update technique, the algorithm maintains robustness against abrupt intention shifts and unknown motion dynamics. A sampling-based trajectory prediction mechanism then exploits these adaptive estimates to generate probabilistic forecasts with quantified uncertainty. We validate the framework through numerical experiments: Ablation studies of two cases, and a 500-trial Monte Carlo analysis; Hardware demonstrations on quadrotor and quadrupedal platforms. Experimental results demonstrate that the proposed approach significantly outperforms non-adaptive and partially adaptive methods. The method operates in real time around 270 Hz without requiring training or detailed prior knowledge of target behavior, showcasing its applicability in various robotic systems.