A Novel Model for 3D Motion Planning for a Generalized Dubins Vehicle with Pitch and Yaw Rate Constraints
作者: Deepak Prakash Kumar, Swaroop Darbha, Satyanarayana Gupta Manyam, David Casbeer
分类: cs.RO, math.OC
发布日期: 2025-09-29
备注: The code for this paper is available at https://github.com/DeepakPrakashKumar/3D-Motion-Planning-for-Generalized-Dubins-with-Pitch-Yaw-constraints
💡 一句话要点
提出一种考虑俯仰和偏航速率约束的广义Dubins车辆3D运动规划新模型
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 3D运动规划 Dubins车辆 无人机 姿态控制 路径优化
📋 核心要点
- 现有3D运动规划方法通常只考虑俯仰角或航向角,无法完整描述车辆姿态,且控制输入单一,难以准确建模车辆运动学。
- 本文提出一种新的建模方法,使用附着于机身的坐标系描述车辆完整姿态,并使用俯仰和偏航速率两个控制输入。
- 数值模拟表明,该方法平均在10秒内生成可行路径,且在多数情况下路径长度优于现有方法。
📝 摘要(中文)
本文提出了一种新的建模方法和快速算法,用于固定翼无人机的3D运动规划。目标是在满足运动约束的条件下,构建连接给定初始和最终配置的最短路径。本文与现有文献的不同之处在于两个方面。首先,我们使用附着于机身的坐标系来考虑完整的车辆姿态,包括横滚角、俯仰角和偏航角。而现有工作仅使用俯仰角和/或航向角,这不足以唯一确定姿态。其次,我们使用两个控制输入来表示有界的俯仰和偏航速率,反映了由两个独立执行器进行的控制。相比之下,大多数先前的方法依赖于单个输入,例如路径曲率,这不足以准确地对3D车辆的运动学进行建模。我们使用旋转最小化框架来描述车辆的配置及其演变,并通过连接球面、柱面或平面上的最优Dubins路径来构建路径。数值模拟表明,我们的方法平均在10秒内生成可行的路径,并且在大多数情况下产生比现有方法更短的路径。
🔬 方法详解
问题定义:现有3D运动规划方法在无人机应用中存在局限性。一方面,它们通常只考虑俯仰角或航向角,无法完整描述车辆的姿态,导致运动规划不够精确。另一方面,现有方法通常依赖于单一控制输入(如路径曲率),这不足以准确地对3D车辆的运动学进行建模,尤其是在存在多个独立执行器控制的情况下。因此,需要一种更精确、更符合实际的3D运动规划方法。
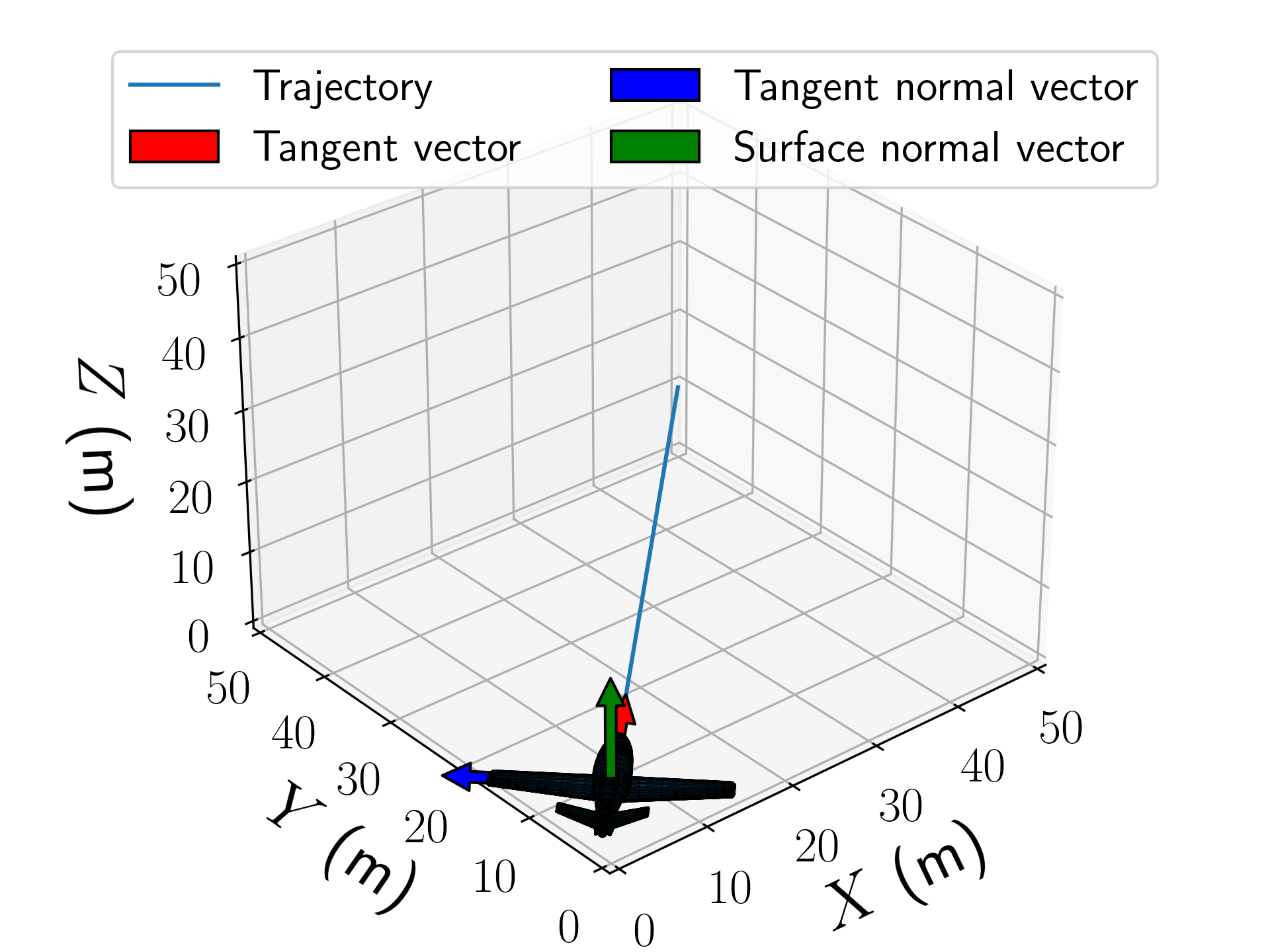
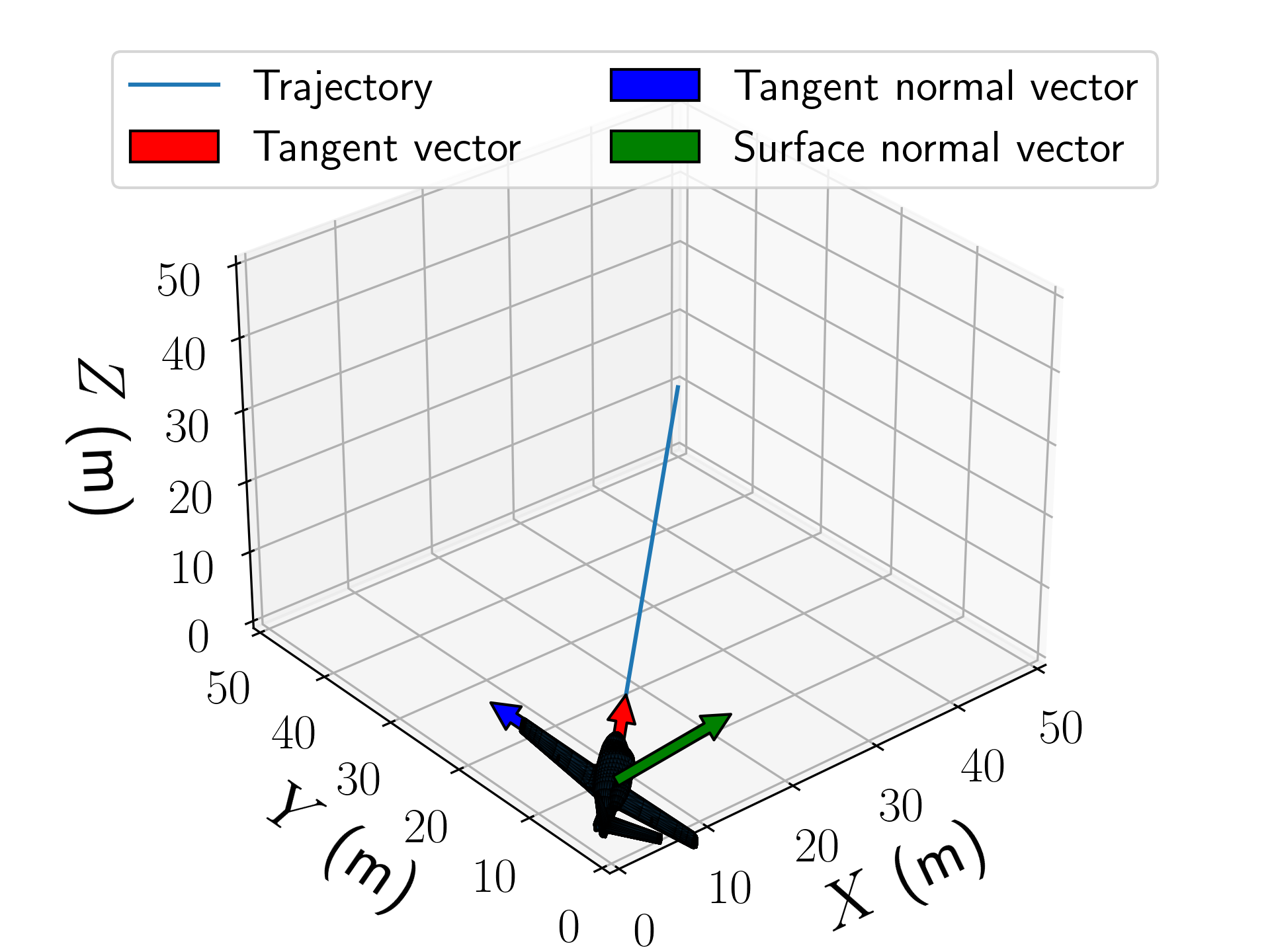
核心思路:本文的核心思路是使用一个附着于机身的坐标系来完整描述车辆的姿态,包括横滚角、俯仰角和偏航角。同时,使用两个控制输入来分别控制俯仰和偏航速率,从而更准确地模拟车辆的运动学特性。通过这种方式,可以更精确地规划出满足运动约束的最短路径。
技术框架:该方法使用旋转最小化框架来描述车辆的配置及其演变。整体流程包括:1) 定义初始和最终车辆配置(包括位置和姿态);2) 在球面、柱面或平面上构建最优Dubins路径;3) 将这些Dubins路径连接起来,形成完整的3D运动路径。该框架的关键在于使用旋转最小化框架和Dubins路径来保证路径的可行性和最优性。
关键创新:该方法最重要的技术创新点在于同时考虑了车辆的完整姿态(包括横滚角、俯仰角和偏航角)和两个独立的控制输入(俯仰和偏航速率)。这与现有方法只考虑部分姿态信息和单一控制输入形成了本质区别,使得该方法能够更准确地建模车辆的运动学特性,并生成更优的运动路径。
关键设计:该方法使用旋转最小化框架来描述车辆的姿态,并通过求解最优控制问题来生成Dubins路径。关键设计包括:1) 如何选择合适的球面、柱面或平面来构建Dubins路径;2) 如何将这些Dubins路径平滑地连接起来,以保证路径的连续性和可微性;3) 如何选择合适的参数来控制俯仰和偏航速率,以满足车辆的运动约束。
🖼️ 关键图片

📊 实验亮点
数值模拟结果表明,该方法平均在10秒内生成可行的3D运动路径,并且在大多数情况下,生成的路径比现有方法更短。这表明该方法在计算效率和路径优化方面都具有优势。具体性能提升幅度取决于具体的场景和参数设置,但总体而言,该方法能够显著提高无人机的运动规划性能。
🎯 应用场景
该研究成果可应用于固定翼无人机的自主导航、路径规划和避障等领域。通过更精确的3D运动规划,可以提高无人机的飞行效率、安全性以及在复杂环境中的适应性。此外,该方法还可以扩展到其他具有类似运动学特性的车辆,如水下机器人等,具有广泛的应用前景。
📄 摘要(原文)
In this paper, we propose a new modeling approach and a fast algorithm for 3D motion planning, applicable for fixed-wing unmanned aerial vehicles. The goal is to construct the shortest path connecting given initial and final configurations subject to motion constraints. Our work differs from existing literature in two ways. First, we consider full vehicle orientation using a body-attached frame, which includes roll, pitch, and yaw angles. However, existing work uses only pitch and/or heading angle, which is insufficient to uniquely determine orientation. Second, we use two control inputs to represent bounded pitch and yaw rates, reflecting control by two separate actuators. In contrast, most previous methods rely on a single input, such as path curvature, which is insufficient for accurately modeling the vehicle's kinematics in 3D. We use a rotation minimizing frame to describe the vehicle's configuration and its evolution, and construct paths by concatenating optimal Dubins paths on spherical, cylindrical, or planar surfaces. Numerical simulations show our approach generates feasible paths within 10 seconds on average and yields shorter paths than existing methods in most cases.