Control Your Robot: A Unified System for Robot Control and Policy Deployment
作者: Tian Nian, Weijie Ke, Shaolong Zhu, Bingshan Hu
分类: cs.RO
发布日期: 2025-09-28 (更新: 2025-12-09)
备注: Code: https://github.com/Tian-Nian/control_your_robot
💡 一句话要点
Control Your Robot:统一机器人控制与策略部署的通用系统
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人控制 策略部署 跨平台 模块化设计 统一API
📋 核心要点
- 现有机器人控制方案面临硬件接口、数据格式和控制范式多样化的难题,导致工具链割裂,阻碍了策略部署。
- Control Your Robot 框架通过标准化工作流、模块化设计和统一 API,实现了跨平台机器人控制和策略部署的统一。
- 实验表明,该框架能够高效收集数据,支持模仿学习和视觉-语言-动作模型,训练出的策略与专家演示高度吻合。
📝 摘要(中文)
跨平台机器人控制一直面临挑战,因为硬件接口、数据格式和控制范式差异巨大,导致工具链分散并减缓了部署速度。为了解决这个问题,我们提出了 Control Your Robot,这是一个模块化、通用的框架,它统一了跨平台的数据收集和策略部署。该系统通过标准化的工作流程、模块化设计、统一的API和闭环架构来减少碎片化。它支持灵活的机器人注册、具有遥操作和轨迹回放的双模控制,以及从多模态数据采集到推理的无缝集成。在单臂和双臂系统上的实验表明,该系统能够实现高效、低延迟的数据收集,并有效支持模仿学习和视觉-语言-动作模型的策略学习。基于Control Your Robot收集的数据训练的策略与专家演示高度匹配,表明该框架能够实现跨平台的可扩展和可复现的机器人学习。
🔬 方法详解
问题定义:现有机器人控制系统面临的主要问题是跨平台兼容性差。不同的机器人平台具有不同的硬件接口、数据格式和控制范式,这导致开发人员需要针对不同的平台开发不同的工具链,增加了开发和部署的复杂性和成本。此外,现有方法难以实现多模态数据的统一采集和处理,限制了机器人学习算法的应用。
核心思路:Control Your Robot 框架的核心思路是通过构建一个模块化、通用的系统,提供统一的API和标准化的工作流程,从而屏蔽底层硬件和软件的差异。该框架旨在实现数据收集、控制和策略部署的无缝集成,支持多种机器人平台和控制模式,并提供多模态数据采集和处理能力。
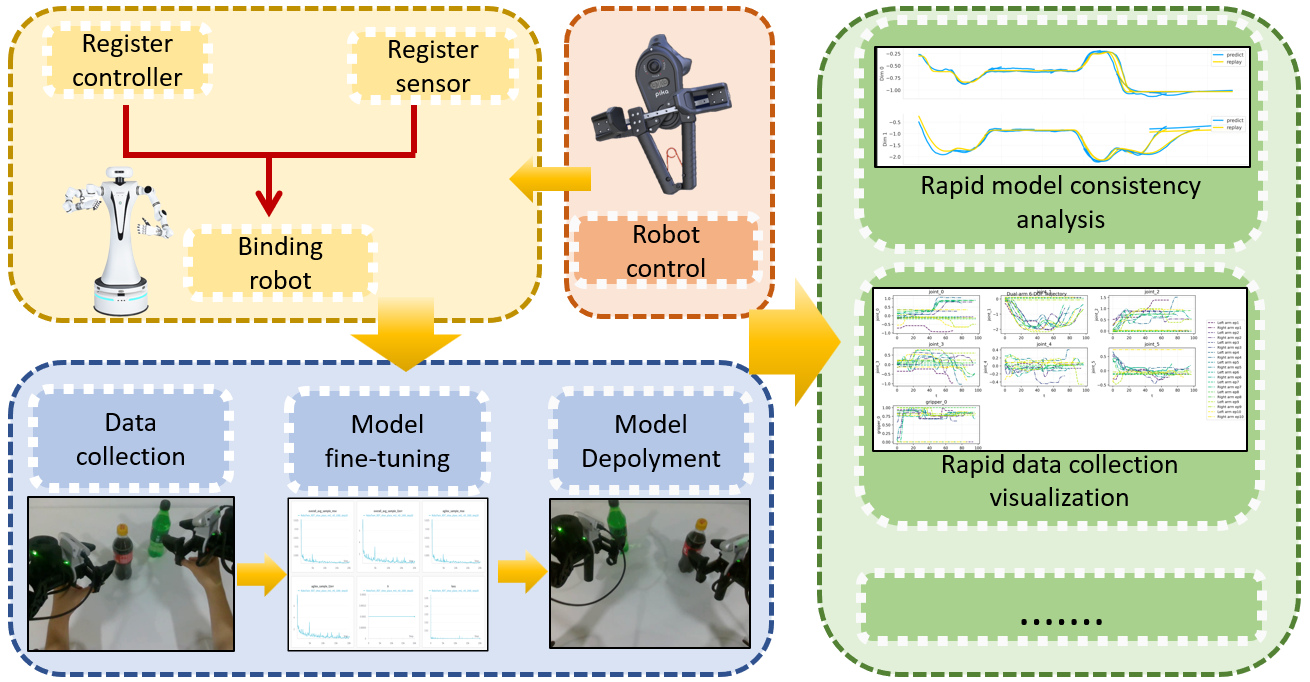
技术框架:Control Your Robot 框架采用模块化设计,包含以下主要模块:机器人注册模块(用于注册和管理不同的机器人平台)、控制模块(支持遥操作和轨迹回放等多种控制模式)、数据采集模块(用于采集多模态数据)和策略部署模块(用于部署和执行学习到的策略)。整个系统采用闭环架构,能够实时反馈和调整控制策略。
关键创新:该框架的关键创新在于其通用性和可扩展性。通过统一的API和标准化的工作流程,该框架能够支持多种机器人平台和控制模式,并能够方便地集成新的模块和功能。此外,该框架还提供了多模态数据采集和处理能力,为机器人学习算法的应用提供了便利。
关键设计:该框架的关键设计包括:统一的机器人描述格式(用于描述不同机器人的硬件和软件配置)、统一的API(用于控制机器人和采集数据)、模块化的软件架构(方便扩展和定制)以及闭环控制机制(用于实时反馈和调整控制策略)。具体的参数设置、损失函数和网络结构取决于具体的机器人学习算法。
🖼️ 关键图片
📊 实验亮点
实验结果表明,Control Your Robot 框架能够实现高效、低延迟的数据收集,并有效支持模仿学习和视觉-语言-动作模型的策略学习。基于该框架收集的数据训练的策略与专家演示高度匹配,验证了该框架在跨平台机器人学习方面的有效性。具体性能数据和对比基线在论文中进行了详细描述。
🎯 应用场景
该研究成果可广泛应用于工业自动化、服务机器人、医疗机器人等领域。通过降低机器人控制和策略部署的复杂性,该框架能够加速机器人技术的应用和普及,并促进机器人学习算法的发展。未来,该框架有望成为机器人开发和研究的标准工具。
📄 摘要(原文)
Cross-platform robot control remains difficult because hardware interfaces, data formats, and control paradigms vary widely, which fragments toolchains and slows deployment. To address this, we present Control Your Robot, a modular, general-purpose framework that unifies data collection and policy deployment across diverse platforms. The system reduces fragmentation through a standardized workflow with modular design, unified APIs, and a closed-loop architecture. It supports flexible robot registration, dual-mode control with teleoperation and trajectory playback, and seamless integration from multimodal data acquisition to inference. Experiments on single-arm and dual-arm systems show efficient, low-latency data collection and effective support for policy learning with imitation learning and vision-language-action models. Policies trained on data gathered by Control Your Robot match expert demonstrations closely, indicating that the framework enables scalable and reproducible robot learning across platforms.