High-Precision Climbing Robot Localization Using Planar Array UWB/GPS/IMU/Barometer Integration
作者: Shuning Zhang, Zhanchen Zhu, Xiangyu Chen, Yunheng Wang, Xu Jiang, Peibo Duan, Renjing Xu
分类: cs.RO
发布日期: 2025-09-28 (更新: 2025-10-24)
💡 一句话要点
提出基于注意力机制融合的UWB/GPS/IMU/气压计多传感器融合定位系统,用于提升攀爬机器人在复杂环境下的定位精度。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 攀爬机器人 多传感器融合 超宽带(UWB) 注意力机制 无迹卡尔曼滤波(UKF) 高精度定位 机器人导航
📋 核心要点
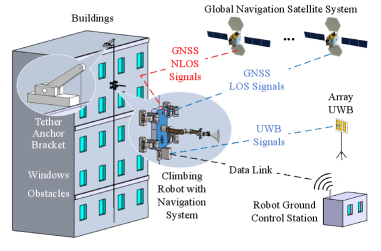
- 攀爬机器人在复杂高空环境中的定位面临GPS信号遮挡和UWB非视距传播等挑战,传统单传感器方案难以满足高精度和鲁棒性需求。
- 论文提出一种基于注意力机制的多传感器融合系统,利用UWB、GPS、IMU和气压计数据,通过自适应融合策略提升定位性能。
- 实验结果表明,该方法在真实场景中实现了0.48米的定位精度,优于传统GPS/INS-EKF算法,并具有更强的鲁棒性。
📝 摘要(中文)
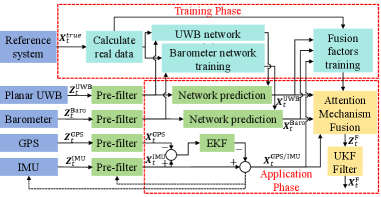
为了满足攀爬机器人在复杂高空环境中高精度定位的需求,本文提出了一种多传感器融合系统,克服了单一传感器方法的局限性。首先,分析了定位场景和问题模型。设计了一种基于注意力机制融合算法(AMFA)的集成架构,该架构融合了平面阵列超宽带(UWB)、GPS、惯性测量单元(IMU)和气压计,以应对GPS遮挡和UWB非视距(NLOS)等挑战。然后,开发了用于UWB和气压计的端到端神经网络推理模型,以及用于自适应数据融合的多模态注意力机制。应用无迹卡尔曼滤波器(UKF)来优化轨迹,提高精度和鲁棒性。最后,真实世界的实验表明,该方法实现了0.48米的定位精度和1.50米的较低最大误差,优于GPS/INS-EKF等基线算法,并表现出更强的鲁棒性。
🔬 方法详解
问题定义:攀爬机器人在复杂高空环境中的精确定位,现有方法如GPS在遮挡情况下性能下降,UWB易受非视距影响,单一传感器难以保证精度和鲁棒性。因此,需要一种能够有效融合多种传感器信息,克服各自局限性的定位方案。
核心思路:利用多传感器信息互补的特性,通过注意力机制自适应地调整不同传感器数据的权重,从而在各种复杂环境下实现更准确的定位。核心在于学习不同传感器在不同环境下的可靠性,并动态调整其在定位结果中的贡献。
技术框架:该系统采用多传感器融合架构,主要包含以下模块:1) 数据采集模块:获取UWB、GPS、IMU和气压计数据;2) 传感器数据预处理模块:对原始数据进行滤波、校准等处理;3) 基于神经网络的UWB和气压计数据推理模型:用于提高UWB和气压计数据的精度;4) 基于多模态注意力机制的数据融合模块:根据传感器数据的质量动态调整权重;5) 基于UKF的轨迹优化模块:利用UKF对融合后的轨迹进行平滑和优化。
关键创新:1) 提出了基于平面阵列UWB的定位方法,提高了UWB定位的精度和稳定性;2) 设计了基于注意力机制的多模态融合算法(AMFA),能够自适应地调整不同传感器数据的权重,提高了系统的鲁棒性;3) 构建了端到端的神经网络推理模型,用于提高UWB和气压计数据的精度。
关键设计:1) 平面阵列UWB的阵列几何结构设计;2) 注意力机制中注意力权重的计算方式,例如使用神经网络学习权重;3) UKF的状态转移方程和观测方程的设计,需要根据具体的传感器模型进行调整;4) 神经网络推理模型的网络结构、损失函数和训练策略。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在真实攀爬机器人场景中实现了0.48米的定位精度,最大误差降低至1.50米。与传统的GPS/INS-EKF算法相比,该方法在精度和鲁棒性方面均有显著提升,尤其是在GPS信号遮挡和UWB非视距传播等复杂环境下,优势更加明显。
🎯 应用场景
该研究成果可应用于电力巡检机器人、桥梁检测机器人、高层建筑维护机器人等领域,提升这些机器人在复杂环境下的自主导航和作业能力。高精度定位能够提高作业效率和安全性,降低人工成本,并为相关行业带来智能化升级。
📄 摘要(原文)
To address the need for high-precision localization of climbing robots in complex high-altitude environments, this paper proposes a multi-sensor fusion system that overcomes the limitations of single-sensor approaches. Firstly, the localization scenarios and the problem model are analyzed. An integrated architecture of Attention Mechanism-based Fusion Algorithm (AMFA) incorporating planar array Ultra-Wideband (UWB), GPS, Inertial Measurement Unit (IMU), and barometer is designed to handle challenges such as GPS occlusion and UWB Non-Line-of-Sight (NLOS) problem. Then, End-to-end neural network inference models for UWB and barometer are developed, along with a multimodal attention mechanism for adaptive data fusion. An Unscented Kalman Filter (UKF) is applied to refine the trajectory, improving accuracy and robustness. Finally, real-world experiments show that the method achieves 0.48 m localization accuracy and lower MAX error of 1.50 m, outperforming baseline algorithms such as GPS/INS-EKF and demonstrating stronger robustness.