Space Robotics Bench: Robot Learning Beyond Earth
作者: Andrej Orsula, Matthieu Geist, Miguel Olivares-Mendez, Carol Martinez
分类: cs.RO, cs.AI, cs.LG
发布日期: 2025-09-27
备注: The source code is available at https://github.com/AndrejOrsula/space_robotics_bench
💡 一句话要点
Space Robotics Bench:为太空机器人学习提供开源模拟框架与基准测试。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 太空机器人 机器人学习 强化学习 模拟环境 程序生成 Sim-to-Real 自主系统
📋 核心要点
- 太空机器人学习面临数据匮乏和技术验证成本高昂的挑战,阻碍了自主系统在极端环境下的应用。
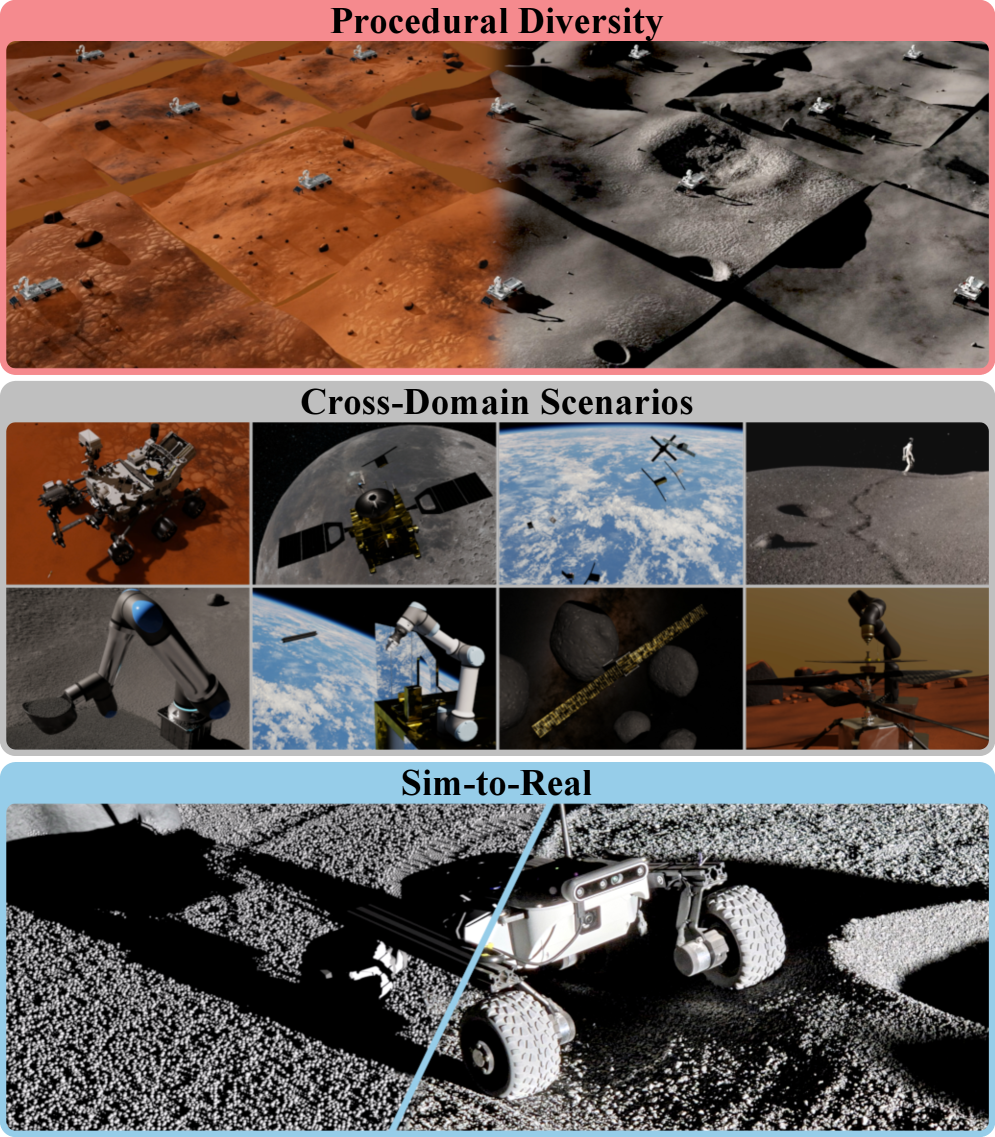
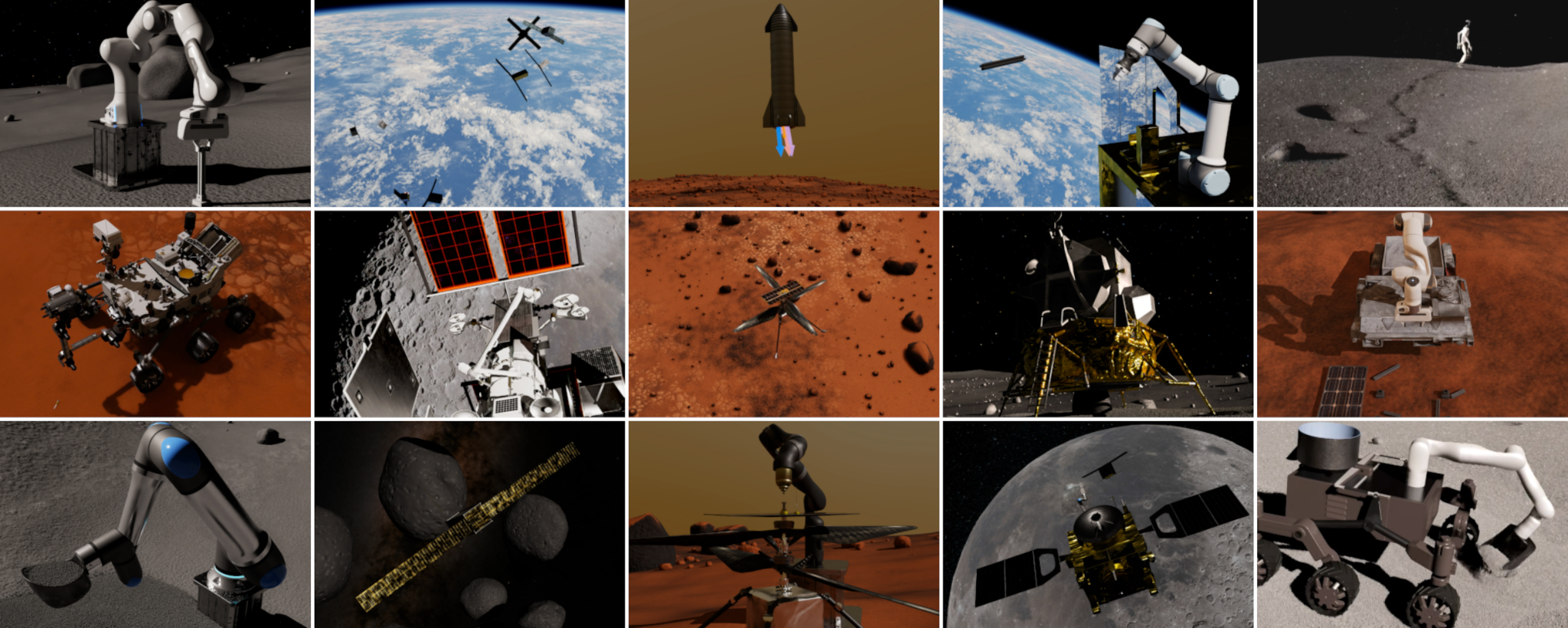
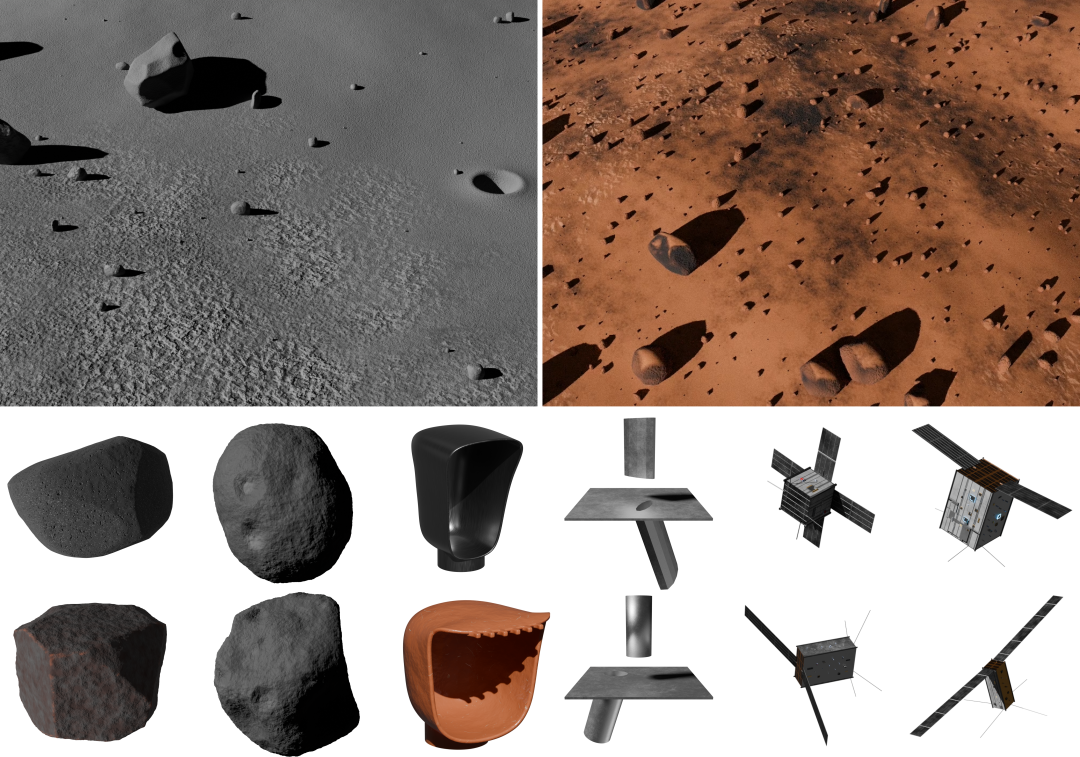
- Space Robotics Bench提供模块化、可扩展的模拟环境,结合程序生成技术,为机器人学习提供海量训练数据。
- 该框架包含一系列基准测试任务,并利用强化学习算法建立基线,为泛化能力、迁移学习等研究提供平台。
📝 摘要(中文)
日益增长的太空探索需求需要能够在极端外星条件下在非结构化环境中运行的强大自主系统。机器人学习在该领域的应用受到技术演示的高昂成本和有限的数据可用性的严重阻碍。为了弥合这一差距,我们推出了Space Robotics Bench,这是一个用于太空机器人学习的开源模拟框架。它提供了一个模块化架构,该架构将按需程序生成与大规模并行模拟环境集成,以支持为基于学习的智能体创建庞大而多样化的训练分布。为了巩固研究并实现直接比较,该框架包括一套全面的基准测试任务,涵盖了广泛的任务相关场景。我们使用标准强化学习算法建立性能基线,并提出一系列实验案例研究,以研究泛化、端到端学习、自适应控制和sim-to-real迁移中的关键挑战。我们的结果揭示了当前方法的局限性,并证明了该框架在生成能够进行真实世界操作的策略方面的效用。这些贡献将Space Robotics Bench确立为开发、基准测试和部署最终前沿所需的强大自主系统的宝贵资源。
🔬 方法详解
问题定义:论文旨在解决太空机器人学习中数据稀缺和真实环境部署成本高昂的问题。现有方法难以在复杂、未知的太空环境中实现鲁棒的自主操作,主要痛点在于缺乏足够多样化的训练数据和有效的sim-to-real迁移策略。
核心思路:核心思路是构建一个开源的、可定制的模拟环境,利用程序生成技术自动创建大量不同的场景,从而为机器人学习提供充足的训练数据。通过在模拟环境中训练智能体,并研究sim-to-real迁移技术,最终实现真实太空环境中的自主操作。
技术框架:Space Robotics Bench框架包含以下主要模块:1) 基于程序生成的环境创建模块,用于生成各种地形、光照、物体等;2) 大规模并行模拟环境,支持高效地运行多个模拟实例;3) 机器人模型库,包含不同类型的太空机器人;4) 基准测试任务集,涵盖抓取、导航、操作等任务;5) 强化学习算法库,提供常用的RL算法实现。
关键创新:该框架的关键创新在于将程序生成技术与大规模并行模拟相结合,能够自动生成大量多样化的训练数据,有效解决了太空机器人学习中数据稀缺的问题。此外,该框架还提供了一套全面的基准测试任务,方便研究者进行算法比较和性能评估。
关键设计:框架采用模块化设计,方便用户自定义环境、机器人和任务。程序生成模块可以控制地形的粗糙度、光照强度、物体密度等参数。强化学习算法可以选择不同的奖励函数和网络结构。sim-to-real迁移可以采用域随机化、对抗训练等技术。
🖼️ 关键图片
📊 实验亮点
论文通过实验验证了Space Robotics Bench的有效性。使用强化学习算法在模拟环境中训练的智能体,在抓取、导航等任务上取得了良好的性能。实验还表明,通过域随机化等技术,可以有效提高sim-to-real迁移的效果,使智能体能够在真实环境中稳定运行。该框架为太空机器人学习提供了一个强大的工具。
🎯 应用场景
该研究成果可应用于太空探索、行星探测、卫星维护等领域。通过在模拟环境中训练机器人,可以降低真实任务的风险和成本,加速太空机器人技术的研发和应用。未来,该框架有望推动太空自主系统的发展,实现更高效、更智能的太空任务。
📄 摘要(原文)
The growing ambition for space exploration demands robust autonomous systems that can operate in unstructured environments under extreme extraterrestrial conditions. The adoption of robot learning in this domain is severely hindered by the prohibitive cost of technology demonstrations and the limited availability of data. To bridge this gap, we introduce the Space Robotics Bench, an open-source simulation framework for robot learning in space. It offers a modular architecture that integrates on-demand procedural generation with massively parallel simulation environments to support the creation of vast and diverse training distributions for learning-based agents. To ground research and enable direct comparison, the framework includes a comprehensive suite of benchmark tasks that span a wide range of mission-relevant scenarios. We establish performance baselines using standard reinforcement learning algorithms and present a series of experimental case studies that investigate key challenges in generalization, end-to-end learning, adaptive control, and sim-to-real transfer. Our results reveal insights into the limitations of current methods and demonstrate the utility of the framework in producing policies capable of real-world operation. These contributions establish the Space Robotics Bench as a valuable resource for developing, benchmarking, and deploying the robust autonomous systems required for the final frontier.