Distributed Multi-Robot Multi-Target Simultaneous Search and Tracking in an Unknown Non-convex Environment
作者: Jun Chen, Jiaqing Ma, Philip Dames
分类: cs.RO
发布日期: 2025-09-27
💡 一句话要点
提出一种多机器人协同搜索与跟踪算法,解决未知非凸环境下的目标搜索与跟踪问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机器人系统 协同搜索 目标跟踪 环境探索 运动规划
📋 核心要点
- 现有方法难以在复杂未知环境中同时优化环境探索、信息搜索和目标跟踪任务。
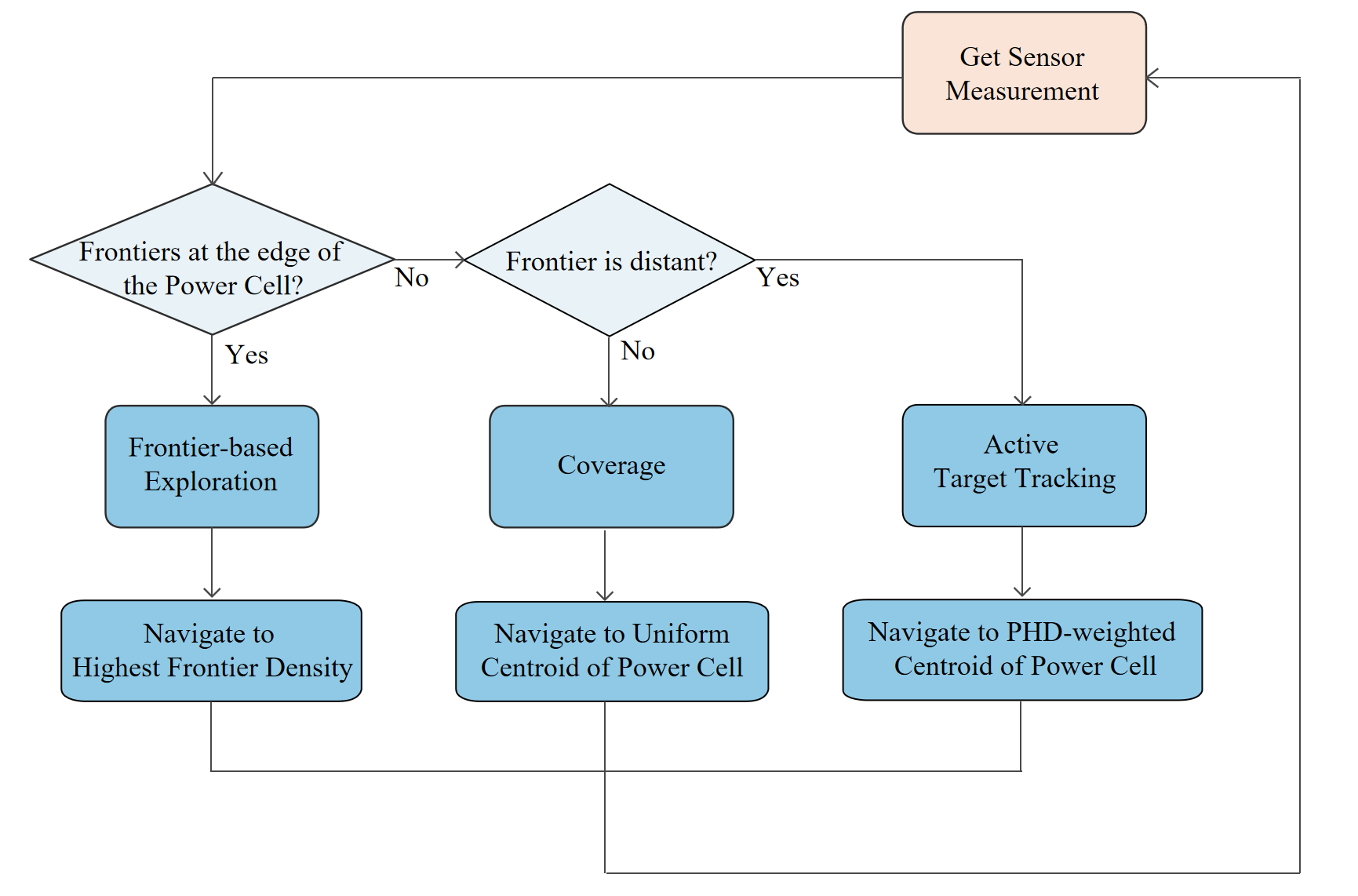
- 提出一种集成了前沿探索、Lloyd覆盖和传感器跟踪的运动规划算法框架。
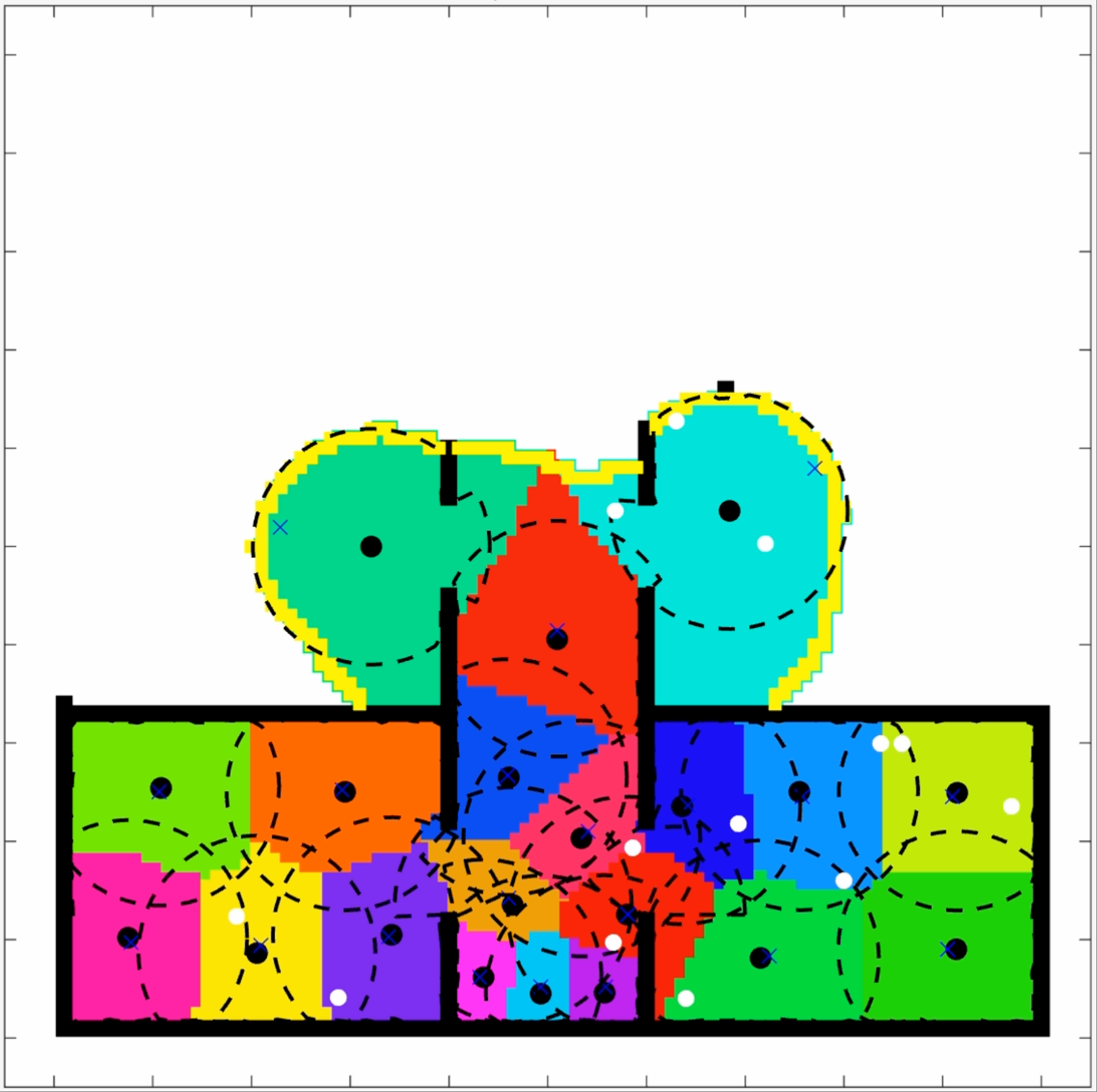
- MATLAB仿真验证了该算法的有效性,并表明其优于标准方法。
📝 摘要(中文)
在未知的非凸环境中,例如室内和地下空间,部署机器人集群进行环境探索,同时搜索和跟踪目标,以维持高精度的数据收集,是一个亟待解决的根本性挑战,在环境监测和救援行动等应用中至关重要。目前的研究在环境探索、信息搜索和目标跟踪问题上取得了显著进展,但尚未建立一个在复杂环境中同时优化这些任务的框架。本文提出了一种新的运动规划算法框架,该框架集成了三种控制策略:基于前沿的探索策略、基于Lloyd算法的保证覆盖策略和基于传感器的多目标跟踪策略。通过整合这三种策略,所提出的算法在探索过程中平衡了覆盖搜索和高精度主动跟踪。通过一系列MATLAB仿真验证了该方法的有效性和优于标准方法。
🔬 方法详解
问题定义:论文旨在解决在未知非凸环境下,如何利用多机器人集群同时进行环境探索、目标搜索和目标跟踪的问题。现有方法通常侧重于解决单一任务,例如单独的环境探索或目标跟踪,缺乏一个能够同时优化这三个任务的统一框架,导致效率低下,无法保证高精度的数据收集。
核心思路:论文的核心思路是将环境探索、区域覆盖和目标跟踪三个任务整合到一个统一的运动规划框架中。通过结合基于前沿的探索策略、基于Lloyd算法的保证覆盖策略和基于传感器的多目标跟踪策略,使机器人集群能够在探索环境的同时,高效地搜索和跟踪目标,从而实现全局优化。
技术框架:该算法框架包含三个主要模块:1) 基于前沿的探索模块,用于引导机器人探索未知区域;2) 基于Lloyd算法的覆盖模块,用于确保机器人集群对已知区域进行有效覆盖;3) 基于传感器的多目标跟踪模块,用于实时跟踪和定位感兴趣的目标。这三个模块协同工作,机器人首先利用前沿探索模块发现新的区域,然后利用Lloyd覆盖模块确保对已探索区域的有效覆盖,同时利用目标跟踪模块搜索和跟踪目标。
关键创新:该论文的关键创新在于提出了一个能够同时优化环境探索、区域覆盖和目标跟踪的统一框架。与现有方法相比,该框架能够更有效地利用机器人集群的资源,提高搜索和跟踪效率,并保证高精度的数据收集。此外,将Lloyd算法应用于保证覆盖策略,能够有效地优化机器人集群的分布,提高覆盖效率。
关键设计:论文中,基于前沿的探索策略采用了一种启发式搜索算法,引导机器人向未知区域移动。Lloyd算法用于优化机器人集群的分布,使其能够更有效地覆盖已知区域。基于传感器的多目标跟踪策略采用了一种卡尔曼滤波算法,用于实时跟踪和定位目标。具体的参数设置和损失函数等技术细节在论文中未详细描述,属于未知内容。
🖼️ 关键图片
📊 实验亮点
通过MATLAB仿真实验验证了该算法的有效性,结果表明,与标准方法相比,该算法能够在探索环境的同时,更有效地搜索和跟踪目标,提高了搜索和跟踪效率。具体的性能数据和提升幅度在摘要中未给出,属于未知内容。仿真结果验证了该方法在复杂环境下的可行性。
🎯 应用场景
该研究成果可应用于环境监测、灾难救援、地下矿井勘探、室内安防等领域。在环境监测中,机器人集群可以用于监测空气质量、水质等环境参数。在灾难救援中,机器人集群可以用于搜索幸存者、评估灾情。在地下矿井勘探中,机器人集群可以用于绘制矿井地图、探测矿产资源。在室内安防中,机器人集群可以用于监控安全隐患、巡逻警戒。
📄 摘要(原文)
In unknown non-convex environments, such as indoor and underground spaces, deploying a fleet of robots to explore the surroundings while simultaneously searching for and tracking targets of interest to maintain high-precision data collection represents a fundamental challenge that urgently requires resolution in applications such as environmental monitoring and rescue operations. Current research has made significant progress in addressing environmental exploration, information search, and target tracking problems, but has yet to establish a framework for simultaneously optimizing these tasks in complex environments. In this paper, we propose a novel motion planning algorithm framework that integrates three control strategies: a frontier-based exploration strategy, a guaranteed coverage strategy based on Lloyd's algorithm, and a sensor-based multi-target tracking strategy. By incorporating these three strategies, the proposed algorithm balances coverage search and high-precision active tracking during exploration. Our approach is validated through a series of MATLAB simulations, demonstrating validity and superiority over standard approaches.