Effect of Gait Design on Proprioceptive Sensing of Terrain Properties in a Quadrupedal Robot
作者: Ethan Fulcher, J. Diego Caporale, Yifeng Zhang, John Ruck, Feifei Qian
分类: cs.RO, eess.SY
发布日期: 2025-09-26
备注: 7+1 pages, 5 figures, ICRA Submission This work has been submitted to the IEEE for possible publication
💡 一句话要点
步态设计影响四足机器人对地形属性的本体感受,提出适用于地形感知的步态策略。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion)
关键词: 四足机器人 步态设计 地形感知 本体感受 行星探测
📋 核心要点
- 腿式机器人需要在松散、可变形地形上进行勘探,但现有方法难以兼顾运动和地形属性感知。
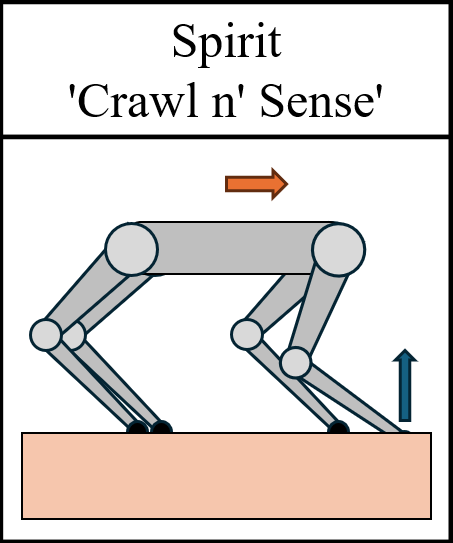
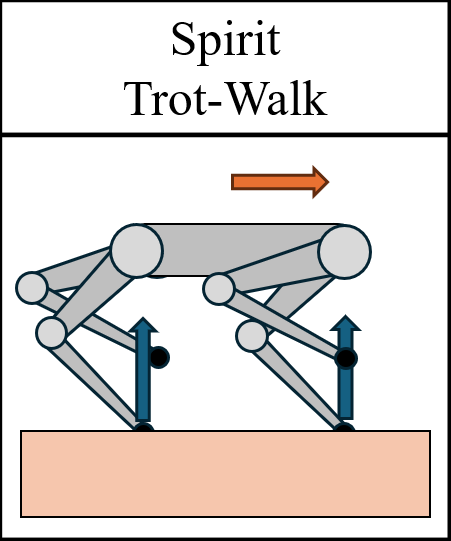
- 论文提出一种面向感知的步态(Crawl N' Sense),并与面向运动的步态(Trot-Walk)进行对比,研究步态对地形感知精度的影响。
- 实验结果表明,两种步态都能区分不同强度的基底,但爬行步态在检测表面硬壳破裂方面具有更高的精度。
📝 摘要(中文)
原位机器人勘探是推进地球和其他行星地质过程认知的关键工具。为了提升这些移动实验室的作业能力,理解环境的力学属性至关重要,尤其是在松散、可变形的地形上。现有研究表明,采用直接驱动和低齿轮比驱动器的腿式机器人能够灵敏地检测外部力,因此有潜力在运动过程中利用腿部测量地形属性,从而以前所未有的速度和密度进行采样,并进入之前风险过高的地形。本文通过研究步态对本体感受地形感知精度的影响来探索这些想法,特别比较了面向感知的步态(Crawl N' Sense)和面向运动的步态(Trot-Walk)。量化了每种步态测量可变形基底强度和纹理的能力,机器人横穿由刚性表面、松散沙子和带有合成表面硬壳的松散沙子组成的实验室样带。结果表明,无论是面向感知的爬行步态还是面向运动的小跑步态,机器人都能测量到低阻和高阻基底在强度(以抗穿透性衡量)上的持续差异;然而,面向运动的小跑步态在测量中包含更大的幅度和方差。此外,较慢的爬行步态能够以明显高于较快的小跑步态的精度检测到表面硬壳的脆性破裂。这些结果为腿式机器人“运动中感知”的步态设计和规划提供了新的见解,用于侦察地形并在其他星球上进行科学测量,以增进我们对其地质和形成的理解。
🔬 方法详解
问题定义:论文旨在解决四足机器人在松散、可变形地形上运动时,如何通过步态设计提高地形属性感知的准确性和可靠性的问题。现有方法通常侧重于运动效率或稳定性,而忽略了在运动过程中进行精确地形感知的重要性。这限制了机器人对环境的理解,并可能导致导航和操作上的困难。
核心思路:论文的核心思路是通过优化步态设计,使机器人能够更有效地利用其本体感受器(如关节力矩传感器)来感知地形属性。作者假设不同的步态会对机器人与地形的相互作用产生不同的影响,从而影响地形感知的精度。通过对比面向感知的步态和面向运动的步态,可以揭示步态设计对地形感知性能的影响。
技术框架:论文的整体框架包括以下几个主要步骤:1) 设计两种不同的步态:一种是面向感知的爬行步态(Crawl N' Sense),另一种是面向运动的小跑步态(Trot-Walk)。2) 在实验室环境中构建包含不同地形属性的样带,包括刚性表面、松散沙子和带有合成表面硬壳的松散沙子。3) 让机器人分别采用两种步态在样带上运动,并记录其关节力矩传感器的数据。4) 分析传感器数据,提取与地形属性相关的特征,如抗穿透性和表面纹理。5) 比较两种步态在测量地形属性方面的精度和可靠性。
关键创新:论文的关键创新在于提出了面向感知的步态设计理念,并验证了步态设计对地形感知性能的显著影响。与现有方法相比,该研究不仅关注机器人的运动能力,还强调了在运动过程中进行精确地形感知的重要性。通过优化步态设计,可以提高机器人对环境的理解,并为未来的地形勘探任务提供更可靠的数据。
关键设计:论文的关键设计包括:1) Crawl N' Sense步态的设计,其特点是缓慢、稳定,能够更精确地测量地形的抗穿透性。2) Trot-Walk步态的设计,其特点是快速、高效,但可能牺牲地形感知的精度。3) 实验样带的设计,其包含了不同类型和强度的地形,能够有效地评估不同步态的地形感知性能。4) 数据分析方法的设计,其能够从关节力矩传感器的数据中提取与地形属性相关的特征。
🖼️ 关键图片
📊 实验亮点
实验结果表明,两种步态都能测量到低阻和高阻基底在强度上的差异。然而,面向运动的小跑步态在测量中包含更大的幅度和方差。更重要的是,较慢的爬行步态能够以明显高于较快的小跑步态的精度检测到表面硬壳的脆性破裂。这表明,通过优化步态设计,可以显著提高机器人对特定地形特征的感知能力。
🎯 应用场景
该研究成果可应用于行星探测、灾后搜救、农业机器人等领域。通过优化步态设计,机器人能够在复杂地形中更安全、更高效地移动,并获取有价值的环境信息。例如,在火星探测任务中,机器人可以利用该技术识别潜在的着陆点或寻找地下水资源。在灾后搜救中,机器人可以利用该技术在废墟中导航,并定位幸存者。在农业领域,机器人可以利用该技术监测土壤质量,并进行精准施肥。
📄 摘要(原文)
In-situ robotic exploration is an important tool for advancing knowledge of geological processes that describe the Earth and other Planetary bodies. To inform and enhance operations for these roving laboratories, it is imperative to understand the terramechanical properties of their environments, especially for traversing on loose, deformable substrates. Recent research suggested that legged robots with direct-drive and low-gear ratio actuators can sensitively detect external forces, and therefore possess the potential to measure terrain properties with their legs during locomotion, providing unprecedented sampling speed and density while accessing terrains previously too risky to sample. This paper explores these ideas by investigating the impact of gait on proprioceptive terrain sensing accuracy, particularly comparing a sensing-oriented gait, Crawl N' Sense, with a locomotion-oriented gait, Trot-Walk. Each gait's ability to measure the strength and texture of deformable substrate is quantified as the robot locomotes over a laboratory transect consisting of a rigid surface, loose sand, and loose sand with synthetic surface crusts. Our results suggest that with both the sensing-oriented crawling gait and locomotion-oriented trot gait, the robot can measure a consistent difference in the strength (in terms of penetration resistance) between the low- and high-resistance substrates; however, the locomotion-oriented trot gait contains larger magnitude and variance in measurements. Furthermore, the slower crawl gait can detect brittle ruptures of the surface crusts with significantly higher accuracy than the faster trot gait. Our results offer new insights that inform legged robot "sensing during locomotion" gait design and planning for scouting the terrain and producing scientific measurements on other worlds to advance our understanding of their geology and formation.