Learning Multi-Skill Legged Locomotion Using Conditional Adversarial Motion Priors
作者: Ning Huang, Zhentao Xie, Qinchuan Li
分类: cs.RO
发布日期: 2025-09-26
💡 一句话要点
提出基于条件对抗运动先验的多技能四足机器人运动学习框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱八:物理动画 (Physics-based Animation)
关键词: 四足机器人 多技能学习 运动控制 对抗学习 运动先验
📋 核心要点
- 现有方法难以通过单一策略学习多种运动技能,且缺乏平滑的技能过渡。
- 提出基于条件对抗运动先验(CAMP)的多技能学习框架,实现四足机器人从专家数据中学习多样化运动技能。
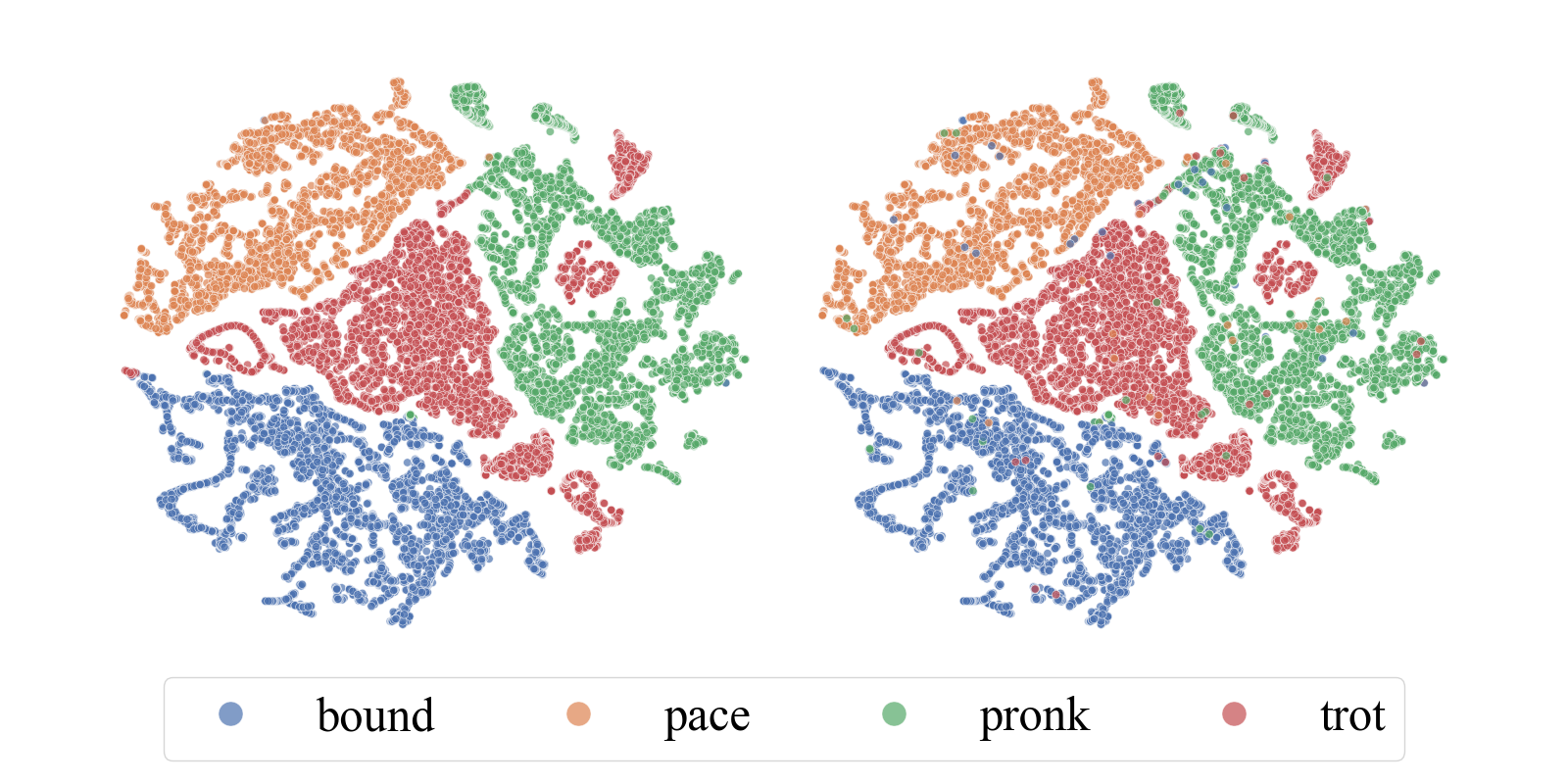
- 通过技能判别器和技能条件奖励设计,实现精确的技能重建,支持技能的主动控制和重用。
📝 摘要(中文)
为了使四足机器人能够在复杂环境中灵活导航,并模仿生物运动,本文提出了一种基于条件对抗运动先验(CAMP)的多技能学习框架,旨在使四足机器人能够从专家演示中高效地学习各种运动技能。通过新颖的技能判别器和技能条件奖励设计,实现了精确的技能重建。该框架支持多种技能的主动控制和重用,为在复杂环境中学习通用策略提供了一种实用的解决方案。
🔬 方法详解
问题定义:现有方法在四足机器人运动技能学习中存在两个主要痛点:一是难以通过单个策略学习多种运动技能,导致技能的泛化能力受限;二是技能之间的过渡不够平滑,影响了机器人在复杂环境中的适应性。
核心思路:本文的核心思路是利用条件对抗运动先验(CAMP)来学习四足机器人的多技能运动。通过将技能信息作为条件输入,并结合对抗学习的思想,使得机器人能够从专家数据中学习到各种运动技能,并实现平滑的技能过渡。
技术框架:该框架主要包含以下几个模块:1) 运动生成器:负责生成机器人的运动轨迹;2) 技能判别器:用于区分生成的运动轨迹和专家数据中的运动轨迹,并根据技能信息进行判别;3) 技能条件奖励:根据当前技能和运动状态,为机器人提供奖励信号,引导机器人学习期望的运动技能。整体流程是,运动生成器根据技能信息生成运动轨迹,技能判别器判断轨迹的真伪,技能条件奖励提供奖励信号,三者共同优化,最终学习到多技能运动策略。
关键创新:该方法最重要的创新点在于提出了条件对抗运动先验(CAMP)的概念,将技能信息作为条件输入到对抗学习框架中,使得机器人能够学习到与技能相关的运动策略。此外,还设计了新颖的技能判别器和技能条件奖励,进一步提高了技能重建的精度和技能过渡的平滑性。
关键设计:技能判别器采用深度神经网络结构,输入为运动轨迹和技能信息,输出为轨迹的真伪概率。技能条件奖励的设计考虑了当前技能和运动状态,例如,在“行走”技能下,奖励机器人向前移动,保持平衡等。损失函数包括对抗损失、技能重建损失和奖励损失,通过平衡这些损失,使得机器人能够学习到高质量的多技能运动策略。
🖼️ 关键图片


📊 实验亮点
该论文提出的方法在四足机器人多技能运动学习方面取得了显著成果。通过实验验证,该方法能够使四足机器人学习到多种运动技能,并且技能之间的过渡更加平滑。与现有方法相比,该方法在技能重建精度和技能过渡平滑性方面均有明显提升。具体性能数据未知。
🎯 应用场景
该研究成果可应用于各种需要四足机器人灵活运动的场景,例如搜救、勘探、物流等。通过学习多种运动技能,四足机器人可以更好地适应复杂地形,完成各种任务。此外,该方法还可以推广到其他类型的机器人,例如人形机器人、轮式机器人等,具有广泛的应用前景。
📄 摘要(原文)
Despite growing interest in developing legged robots that emulate biological locomotion for agile navigation of complex environments, acquiring a diverse repertoire of skills remains a fundamental challenge in robotics. Existing methods can learn motion behaviors from expert data, but they often fail to acquire multiple locomotion skills through a single policy and lack smooth skill transitions. We propose a multi-skill learning framework based on Conditional Adversarial Motion Priors (CAMP), with the aim of enabling quadruped robots to efficiently acquire a diverse set of locomotion skills from expert demonstrations. Precise skill reconstruction is achieved through a novel skill discriminator and skill-conditioned reward design. The overall framework supports the active control and reuse of multiple skills, providing a practical solution for learning generalizable policies in complex environments.