Generating Stable Placements via Physics-guided Diffusion Models
作者: Philippe Nadeau, Miguel Rogel, Ivan Bilić, Ivan Petrović, Jonathan Kelly
分类: cs.RO, cs.LG
发布日期: 2025-09-25
备注: Submitted to the IEEE International Conference on Robotics and Automation 2026, Vienna, Austria, June 1-5, 2026
💡 一句话要点
提出基于物理引导扩散模型的稳定放置生成方法,提升机器人操作的鲁棒性和效率。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion)
关键词: 机器人操作 稳定放置 扩散模型 物理引导 几何感知
📋 核心要点
- 现有机器人放置方法依赖耗时的物理仿真或不精确的启发式规则,难以保证放置的稳定性。
- 论文提出一种基于物理引导的扩散模型,直接在采样过程中融入稳定性考量,无需额外训练。
- 实验表明,该方法在保证放置稳定性的同时,显著降低了计算时间,提升了机器人操作效率。
📝 摘要(中文)
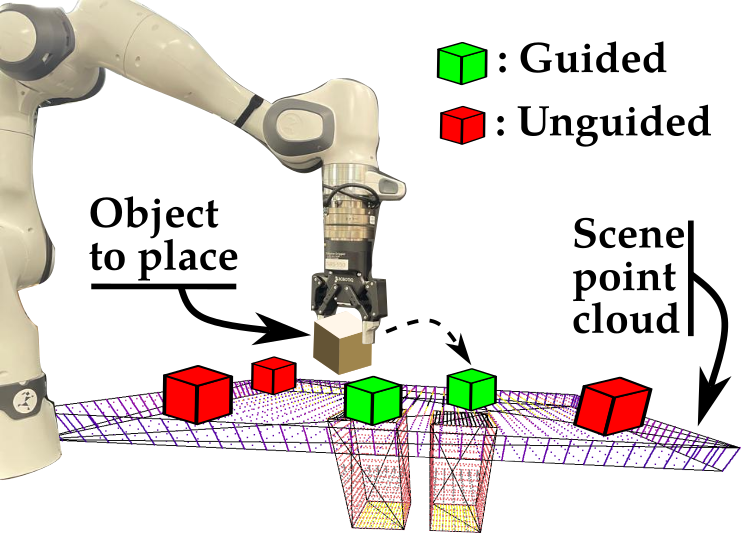
在多物体场景中稳定地放置物体是机器人操作中的一个基本挑战,因为放置必须无穿透、建立精确的表面接触并达到力的平衡。现有方法依赖于运行仿真引擎或采用基于外观的启发式评估来评估稳定性。相比之下,本文的方法将稳定性直接集成到扩散模型的采样过程中。为此,我们查询离线基于采样的规划器以收集多模态放置标签,并训练扩散模型以生成稳定的放置。该扩散模型以场景和物体点云为条件,并作为几何感知的先验。我们利用基于分数的生成模型的组合特性,将这种学习到的先验与稳定性感知的损失相结合,从而增加从高稳定性区域采样的可能性。重要的是,这种策略不需要额外的重新训练或微调,可以直接应用于现成的模型。我们在可以准确计算稳定性的四个基准场景中评估了我们的方法。与最先进的几何方法相比,我们的物理引导模型实现了对强力扰动鲁棒性提高 56%,同时运行时间减少 47% 的放置。
🔬 方法详解
问题定义:论文旨在解决机器人操作中物体稳定放置的问题。现有方法,如基于物理引擎的仿真或启发式规则,计算成本高昂或精度不足,难以在实际应用中保证放置的稳定性。这些方法通常需要大量的计算资源来模拟物理交互,或者依赖于简单的几何或视觉特征,无法准确评估复杂场景下的稳定性。
核心思路:论文的核心思路是将稳定性评估直接融入到扩散模型的生成过程中。通过训练一个以场景和物体点云为条件的扩散模型,学习一个几何感知的先验,并结合稳定性感知的损失函数,引导模型生成更稳定的放置。这种方法避免了耗时的物理仿真,并能够利用扩散模型的强大生成能力,生成多样且稳定的放置方案。
技术框架:整体框架包含以下几个主要步骤:1) 使用离线采样规划器生成多模态的稳定放置标签;2) 训练一个以场景和物体点云为条件的扩散模型,学习放置的几何先验;3) 在采样过程中,结合稳定性感知的损失函数,引导模型生成更稳定的放置。该框架利用了基于分数的生成模型的组合特性,可以在不重新训练或微调的情况下,将学习到的先验与稳定性损失相结合。
关键创新:最重要的技术创新点在于将稳定性评估直接集成到扩散模型的采样过程中。与现有方法相比,该方法不需要额外的物理仿真或启发式规则,而是通过学习一个几何感知的先验和结合稳定性感知的损失函数,直接引导模型生成稳定的放置。这种方法不仅提高了放置的稳定性,还显著降低了计算时间。
关键设计:论文的关键设计包括:1) 使用离线采样规划器生成多模态的稳定放置标签,为扩散模型的训练提供高质量的数据;2) 设计一个以场景和物体点云为条件的扩散模型,学习放置的几何先验;3) 设计一个稳定性感知的损失函数,引导模型生成更稳定的放置。该损失函数可以根据具体的稳定性指标进行设计,例如,可以考虑物体之间的接触力、摩擦力等因素。
🖼️ 关键图片
📊 实验亮点
实验结果表明,与最先进的几何方法相比,该方法在四个基准场景中实现了对强力扰动鲁棒性提高 56%,同时运行时间减少 47%。这表明该方法在保证放置稳定性的同时,显著提高了计算效率,具有很强的实用价值。
🎯 应用场景
该研究成果可广泛应用于机器人操作领域,例如自动化装配、物流分拣、家庭服务机器人等。通过提高物体放置的稳定性和效率,可以显著提升机器人的工作效率和可靠性,降低操作风险。未来,该方法可以进一步扩展到更复杂的场景和任务中,例如在拥挤环境中进行物体操作、在动态环境中进行物体放置等。
📄 摘要(原文)
Stably placing an object in a multi-object scene is a fundamental challenge in robotic manipulation, as placements must be penetration-free, establish precise surface contact, and result in a force equilibrium. To assess stability, existing methods rely on running a simulation engine or resort to heuristic, appearance-based assessments. In contrast, our approach integrates stability directly into the sampling process of a diffusion model. To this end, we query an offline sampling-based planner to gather multi-modal placement labels and train a diffusion model to generate stable placements. The diffusion model is conditioned on scene and object point clouds, and serves as a geometry-aware prior. We leverage the compositional nature of score-based generative models to combine this learned prior with a stability-aware loss, thereby increasing the likelihood of sampling from regions of high stability. Importantly, this strategy requires no additional re-training or fine-tuning, and can be directly applied to off-the-shelf models. We evaluate our method on four benchmark scenes where stability can be accurately computed. Our physics-guided models achieve placements that are 56% more robust to forceful perturbations while reducing runtime by 47% compared to a state-of-the-art geometric method.