Autonomous UAV-Quadruped Docking in Complex Terrains via Active Posture Alignment and Constraint-Aware Control
作者: HaoZhe Xu, Cheng Cheng, HongRui Sang, Zhipeng Wang, Qiyong He, Xiuxian Li, Bin He
分类: cs.RO
发布日期: 2025-09-25
💡 一句话要点
提出主动姿态对齐和约束感知控制的无人机-四足机器人复杂地形自主对接框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 无人机 四足机器人 自主对接 复杂地形 强化学习 约束控制 视觉跟踪
📋 核心要点
- 现有无人机-地面机器人对接方案依赖轮式平台,限制了复杂地形的探索,而四足机器人姿态变化大,难以提供稳定着陆面。
- 该论文提出一种主动姿态对齐和约束感知控制框架,通过四足机器人稳定躯干和无人机精确控制实现复杂地形的自主对接。
- 实验结果表明,该框架能够在室外楼梯(>17cm)和陡峭斜坡(>30度)等复杂地形上成功实现无人机与四足机器人的对接。
📝 摘要(中文)
本文提出了一种用于GPS拒止环境下的无人机(UAV)与地面机器人自主对接框架。针对现有方法主要依赖轮式平台,限制了在复杂地形中的探索能力的问题,以及四足机器人姿态变化频繁,难以提供稳定着陆表面的挑战,本文提出方案。在四足机器人端,通过深度强化学习训练的混合内部模型与水平对齐(HIM-HA)主动稳定躯干,提供水平平台。在无人机端,采用三阶段策略,包括:使用中值滤波YOLOv8检测器的远程捕获;使用约束感知控制器(集成了非奇异快速终端滑模控制器(NFTSMC)和对数障碍函数(BF))的近距离跟踪,以保证在视场(FOV)约束下有限时间误差收敛;以及由安全周期(SP)机制引导的终端下降,该机制共同验证跟踪精度和平台稳定性。所提出的框架在仿真和真实场景中都得到了验证,成功地实现了在高于17厘米的室外楼梯和陡于30度的粗糙斜坡上的对接。
🔬 方法详解
问题定义:现有无人机与地面机器人对接系统,大多依赖于轮式机器人,其在复杂地形下的移动能力受限。而四足机器人虽然具有更强的地形适应性,但其运动过程中躯干姿态变化频繁,难以提供一个稳定的着陆平台,这给无人机的自主对接带来了挑战。因此,需要解决如何在复杂地形下,保证四足机器人提供稳定平台,并实现无人机精确对接的问题。
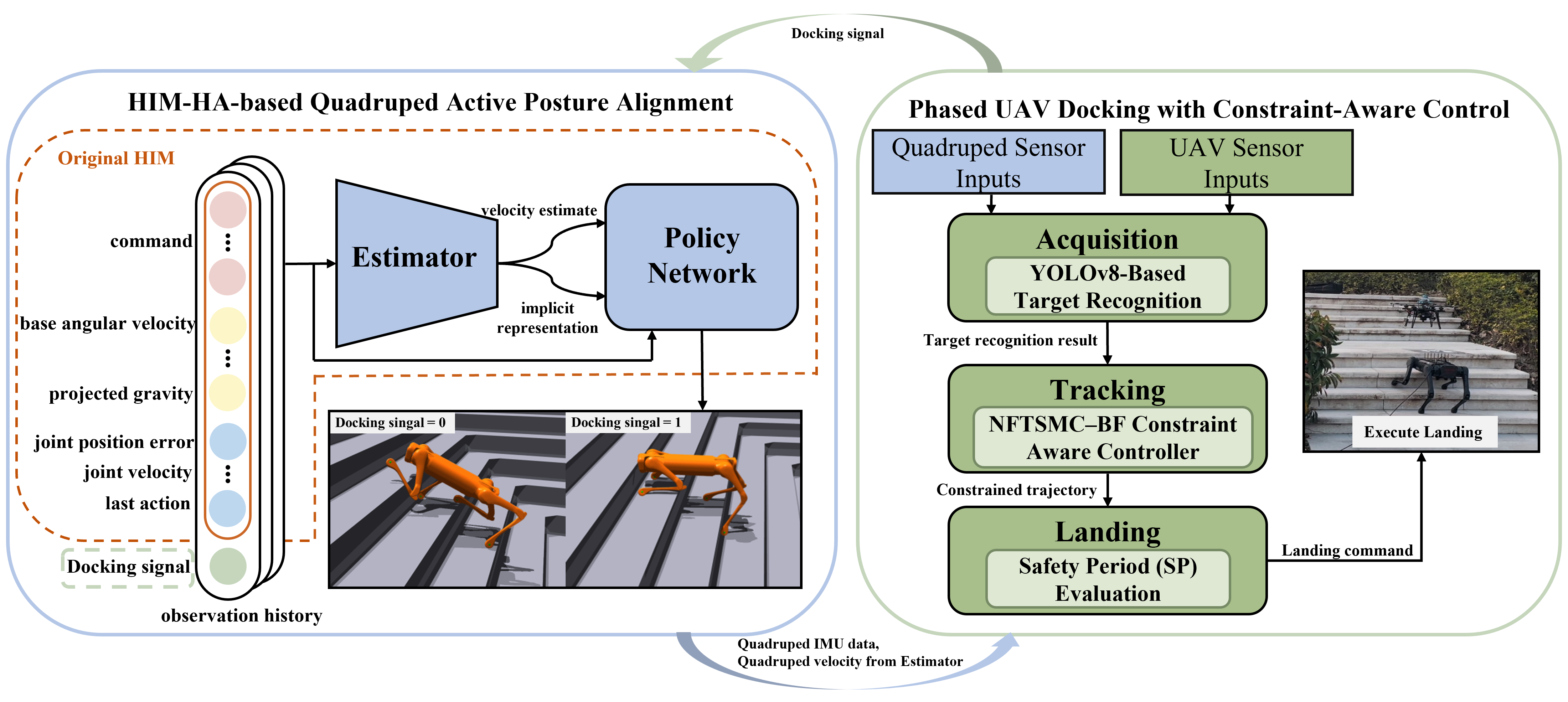
核心思路:论文的核心思路是分别在四足机器人和无人机端进行优化。四足机器人端,通过强化学习训练一个混合内部模型,使其能够主动调整姿态,保持躯干水平,为无人机提供一个稳定的着陆平台。无人机端,采用三阶段控制策略,实现从远距离目标检测到近距离精确跟踪,最终安全着陆。
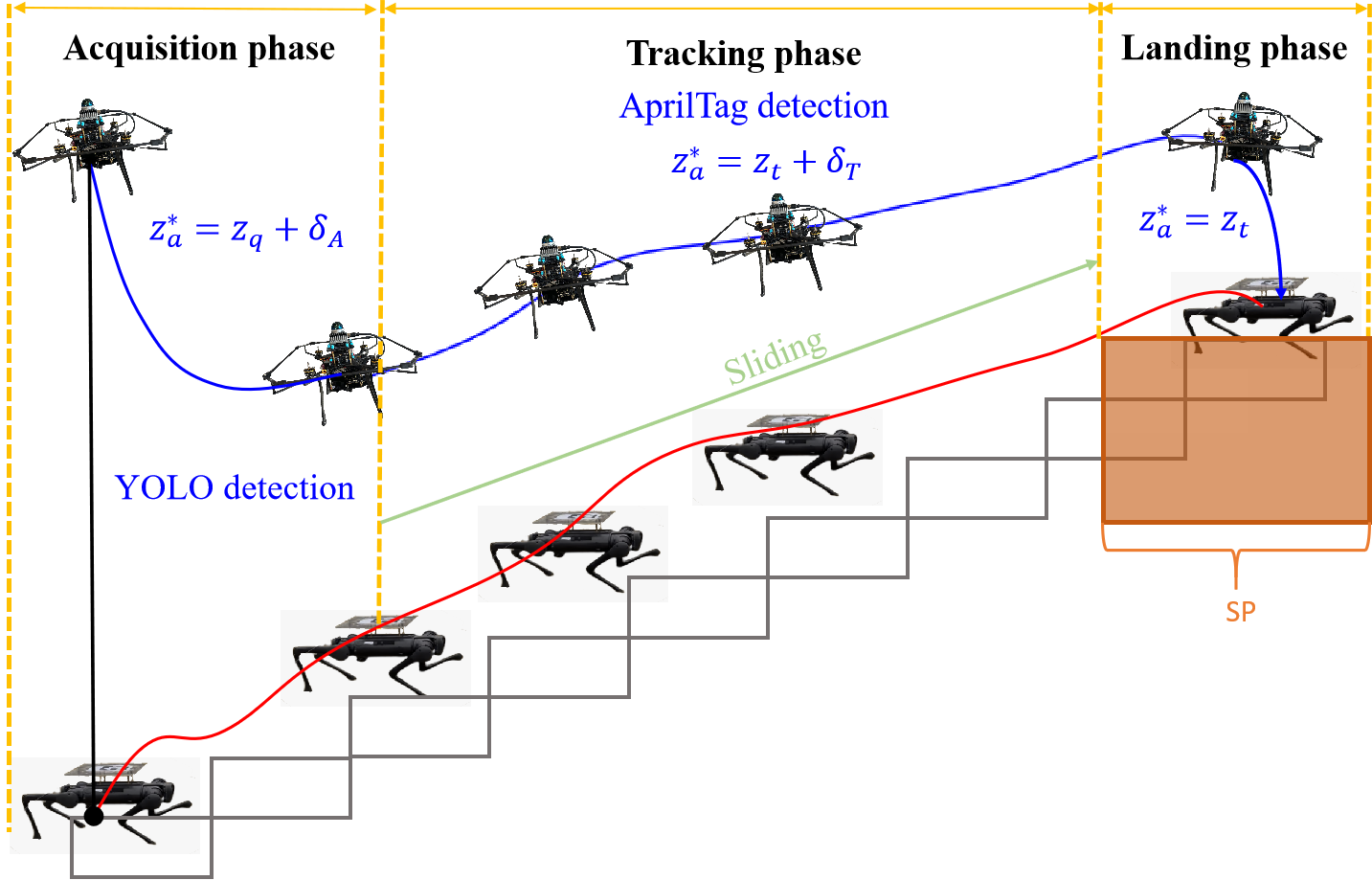
技术框架:整体框架分为四足机器人端和无人机端。四足机器人端使用HIM-HA模型稳定躯干。无人机端分为三个阶段:1) 远程捕获:使用YOLOv8检测四足机器人,并进行中值滤波以提高鲁棒性;2) 近距离跟踪:使用约束感知控制器,结合NFTSMC和对数BF,保证在视场约束下快速收敛;3) 终端下降:使用安全周期机制,验证跟踪精度和平台稳定性,引导无人机安全着陆。
关键创新:该论文的关键创新在于:1) 提出了HIM-HA模型,通过强化学习使四足机器人能够主动稳定躯干,提供水平着陆平台;2) 设计了约束感知控制器,将NFTSMC和对数BF相结合,保证了在视场约束下的快速和稳定的跟踪性能;3) 提出了安全周期机制,用于在终端下降阶段验证跟踪精度和平台稳定性,确保安全着陆。
关键设计:在四足机器人端,HIM-HA模型的具体网络结构和强化学习奖励函数的设计是关键。在无人机端,约束感知控制器中NFTSMC的参数选择,以及对数BF的具体形式,都会影响跟踪性能和稳定性。安全周期机制中,跟踪精度和平台稳定性的阈值设置,直接关系到着陆的安全性。
🖼️ 关键图片

📊 实验亮点
该框架在真实场景中进行了验证,成功实现了在高于17厘米的室外楼梯和陡于30度的粗糙斜坡上的无人机-四足机器人对接。实验结果表明,所提出的方法具有良好的鲁棒性和适应性,能够在复杂地形下实现可靠的自主对接。
🎯 应用场景
该研究成果可应用于复杂地形下的物资运输、环境监测、灾后救援等领域。例如,在地震灾区,无人机可以搭载救援物资,自主降落在四足机器人背上,由四足机器人将物资运送到救援人员手中。此外,该技术还可用于军事侦察、农业巡检等场景,具有广泛的应用前景。
📄 摘要(原文)
Autonomous docking between Unmanned Aerial Vehicles (UAVs) and ground robots is essential for heterogeneous systems, yet most existing approaches target wheeled platforms whose limited mobility constrains exploration in complex terrains. Quadruped robots offer superior adaptability but undergo frequent posture variations, making it difficult to provide a stable landing surface for UAVs. To address these challenges, we propose an autonomous UAV-quadruped docking framework for GPS-denied environments. On the quadruped side, a Hybrid Internal Model with Horizontal Alignment (HIM-HA), learned via deep reinforcement learning, actively stabilizes the torso to provide a level platform. On the UAV side, a three-phase strategy is adopted, consisting of long-range acquisition with a median-filtered YOLOv8 detector, close-range tracking with a constraint-aware controller that integrates a Nonsingular Fast Terminal Sliding Mode Controller (NFTSMC) and a logarithmic Barrier Function (BF) to guarantee finite-time error convergence under field-of-view (FOV) constraints, and terminal descent guided by a Safety Period (SP) mechanism that jointly verifies tracking accuracy and platform stability. The proposed framework is validated in both simulation and real-world scenarios, successfully achieving docking on outdoor staircases higher than 17 cm and rough slopes steeper than 30 degrees. Supplementary materials and videos are available at: https://uav-quadruped-docking.github.io.