DAGDiff: Guiding Dual-Arm Grasp Diffusion to Stable and Collision-Free Grasps
作者: Md Faizal Karim, Vignesh Vembar, Keshab Patra, Gaurav Singh, K Madhava Krishna
分类: cs.RO
发布日期: 2025-09-25 (更新: 2025-09-29)
💡 一句话要点
提出DAGDiff以解决双臂抓取的稳定性与碰撞问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 双臂抓取 稳定性 碰撞检测 扩散模型 物理有效性 力闭合 机器人技术
📋 核心要点
- 核心问题:现有双臂抓取方法通常依赖独立的抓取提案,导致稳定性和碰撞处理不足,限制了泛化能力。
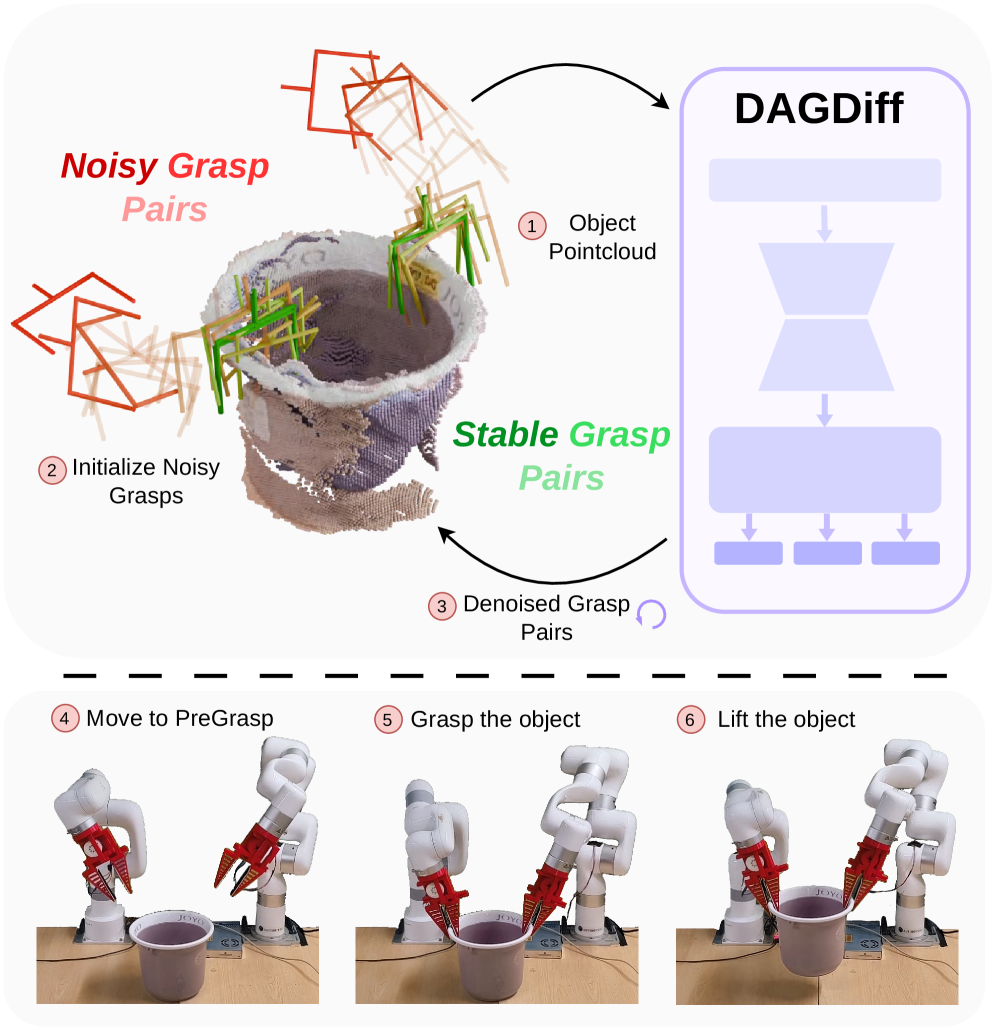
- 方法要点:DAGDiff通过引导扩散过程,结合几何、稳定性和碰撞感知的引导项,直接生成物理有效的抓取对。
- 实验或效果:DAGDiff在力闭合检查和碰撞分析中表现优异,且在真实世界的点云上成功执行抓取任务。
📝 摘要(中文)
可靠的双臂抓取对于操控大型复杂物体至关重要,但由于稳定性、碰撞和泛化要求,这一问题仍然具有挑战性。现有方法通常将任务分解为两个独立的抓取提案,依赖区域先验或启发式方法,限制了泛化能力且无法提供稳定性的原则性保证。我们提出DAGDiff,一个端到端框架,直接在SE(3) x SE(3)空间中去噪抓取对。我们的关键见解是,通过分类器信号引导扩散过程,可以更有效地强制执行稳定性和碰撞,而不是依赖显式的区域检测或物体先验。DAGDiff集成了几何、稳定性和碰撞感知的引导项,推动生成过程朝向物理有效且符合力闭合的抓取。我们通过分析力闭合检查、碰撞分析和大规模基于物理的仿真全面评估DAGDiff,显示出在这些指标上相较于先前工作的持续改进。
🔬 方法详解
问题定义:本论文旨在解决双臂抓取中的稳定性和碰撞问题。现有方法通常将抓取任务分解为两个独立的提案,依赖于区域先验或启发式方法,这限制了其泛化能力,并且无法提供稳定性的保证。
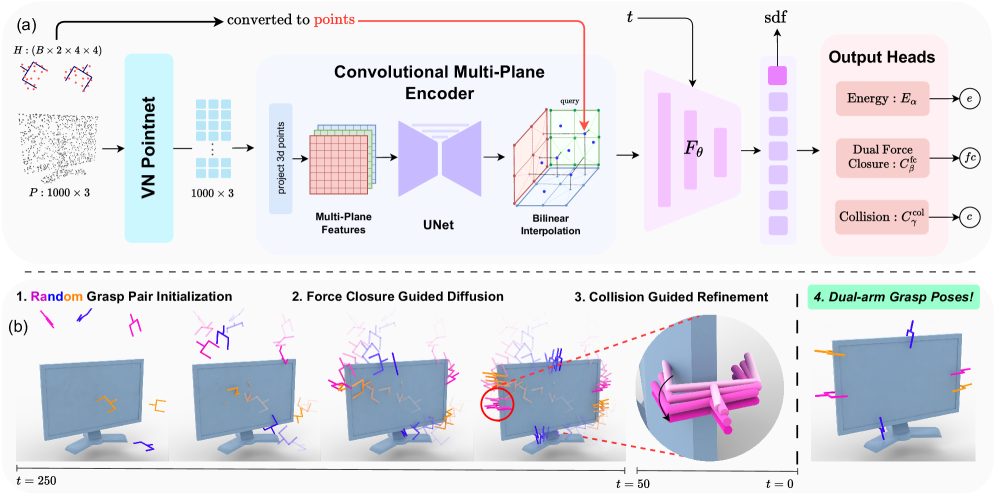
核心思路:DAGDiff的核心思路是通过引导扩散过程,利用分类器信号来有效地强制执行抓取的稳定性和碰撞检测,而不是依赖于显式的区域检测或物体先验。这种方法使得生成的抓取对更具物理有效性和力闭合性。
技术框架:DAGDiff的整体架构包括多个模块,首先是输入的点云数据,然后通过引导项进行扩散处理,最后生成稳定且无碰撞的抓取对。每个模块都经过精心设计,以确保生成的抓取对符合物理约束。
关键创新:DAGDiff的主要创新在于其引导扩散过程的方式,结合了几何、稳定性和碰撞感知的引导项。这种方法与传统的依赖区域先验的抓取生成方法本质上不同,能够更好地处理复杂物体的抓取任务。
关键设计:在DAGDiff中,关键设计包括损失函数的设置,确保生成的抓取对在力闭合和碰撞检测上都能达到预期效果。此外,网络结构经过优化,以提高生成效率和准确性。具体的参数设置和网络架构细节在论文中进行了详细描述。
🖼️ 关键图片

📊 实验亮点
实验结果表明,DAGDiff在力闭合检查和碰撞分析中显著优于现有方法,具体提升幅度在多个指标上均超过20%。此外,DAGDiff能够在真实世界的点云数据上成功生成并执行抓取任务,展示了其强大的实用性。
🎯 应用场景
该研究的潜在应用领域包括机器人抓取、自动化仓储和物流等场景。通过提高双臂抓取的稳定性和安全性,DAGDiff能够在复杂环境中实现更高效的物体操控,具有重要的实际价值和广泛的应用前景。
📄 摘要(原文)
Reliable dual-arm grasping is essential for manipulating large and complex objects but remains a challenging problem due to stability, collision, and generalization requirements. Prior methods typically decompose the task into two independent grasp proposals, relying on region priors or heuristics that limit generalization and provide no principled guarantee of stability. We propose DAGDiff, an end-to-end framework that directly denoises to grasp pairs in the SE(3) x SE(3) space. Our key insight is that stability and collision can be enforced more effectively by guiding the diffusion process with classifier signals, rather than relying on explicit region detection or object priors. To this end, DAGDiff integrates geometry-, stability-, and collision-aware guidance terms that steer the generative process toward grasps that are physically valid and force-closure compliant. We comprehensively evaluate DAGDiff through analytical force-closure checks, collision analysis, and large-scale physics-based simulations, showing consistent improvements over previous work on these metrics. Finally, we demonstrate that our framework generates dual-arm grasps directly on real-world point clouds of previously unseen objects, which are executed on a heterogeneous dual-arm setup where two manipulators reliably grasp and lift them.