Cyber Racing Coach: A Haptic Shared Control Framework for Teaching Advanced Driving Skills
作者: Congkai Shen, Siyuan Yu, Yifan Weng, Haoran Ma, Chen Li, Hiroshi Yasuda, James Dallas, Michael Thompson, John Subosits, Tulga Ersal
分类: cs.RO, cs.HC
发布日期: 2025-09-25 (更新: 2025-10-04)
备注: Added the statement written as red text for the IEEE preprint policy
💡 一句话要点
提出一种触觉共享控制框架,用于提升驾驶员的高性能驾驶技能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉共享控制 高级驾驶技能 人机协作 驾驶员培训 自动驾驶 高性能驾驶 技能习得
📋 核心要点
- 现有触觉共享控制在复杂驾驶任务中技能习得方面的研究不足,且长期技能习得研究多关注简单任务或依赖视觉/听觉辅助。
- 提出一种基于触觉共享控制的网络赛车教练框架,通过人与高性能自动驾驶系统协同,辅助驾驶员掌握高级驾驶技能。
- 人体实验表明,该框架能有效提升驾驶员的赛车技能,相较于自学和完全辅助,驾驶性能和一致性均有显著提高。
📝 摘要(中文)
本研究提出了一种触觉共享控制框架,旨在教授人类驾驶员高级驾驶技能。共享控制指的是人与自动驾驶系统协同控制车辆转向的驾驶模式。高级驾驶技能是指在高性能驾驶中,例如赛车和紧急避障,安全地将车辆推向操控极限所需的技能。以往研究表明,共享控制方案在主观和客观评估中都具有性能和安全优势。然而,这些方案尚未评估其对复杂和高要求任务中技能习得的影响。以往关于长期技能习得的研究要么将触觉共享控制应用于简单任务,要么采用其他反馈方法,如视觉和听觉辅助。为了弥补这一差距,本研究创建了一个基于触觉共享控制范式的网络赛车教练框架,并评估其在帮助人类驾驶员获得高性能驾驶技能方面的性能。该框架引入了:(1)一个能够在高性能驾驶场景中与人类合作的自动驾驶系统;(2)一种触觉共享控制机制,以及一种基于人类驾驶员在训练期间的表现,逐步减少来自自动驾驶的转向辅助的衰减方案。考虑了两个基准:自学(无辅助)和训练期间的完全辅助。人体实验结果表明,与基准相比,所提出的框架有助于人类驾驶员发展卓越的赛车技能,从而获得更好的性能和一致性。
🔬 方法详解
问题定义:论文旨在解决人类驾驶员在高性能驾驶场景下,如何通过有效的辅助手段快速掌握高级驾驶技能的问题。现有方法,如完全依赖驾驶员自身学习或完全由自动驾驶系统控制,都存在局限性。前者学习曲线慢,后者剥夺了驾驶员的学习机会。触觉共享控制虽然有潜力,但在复杂驾驶任务中的应用和长期技能习得效果仍需深入研究。
核心思路:论文的核心思路是利用触觉共享控制,构建一个“网络赛车教练”系统,让人类驾驶员在与高性能自动驾驶系统的协作中学习。通过自动驾驶系统提供辅助力矩,引导驾驶员做出正确的操作,并随着驾驶员技能的提升,逐渐减少辅助力矩,最终实现独立驾驶。这种循序渐进的辅助方式旨在优化学习过程,提高技能习得效率。
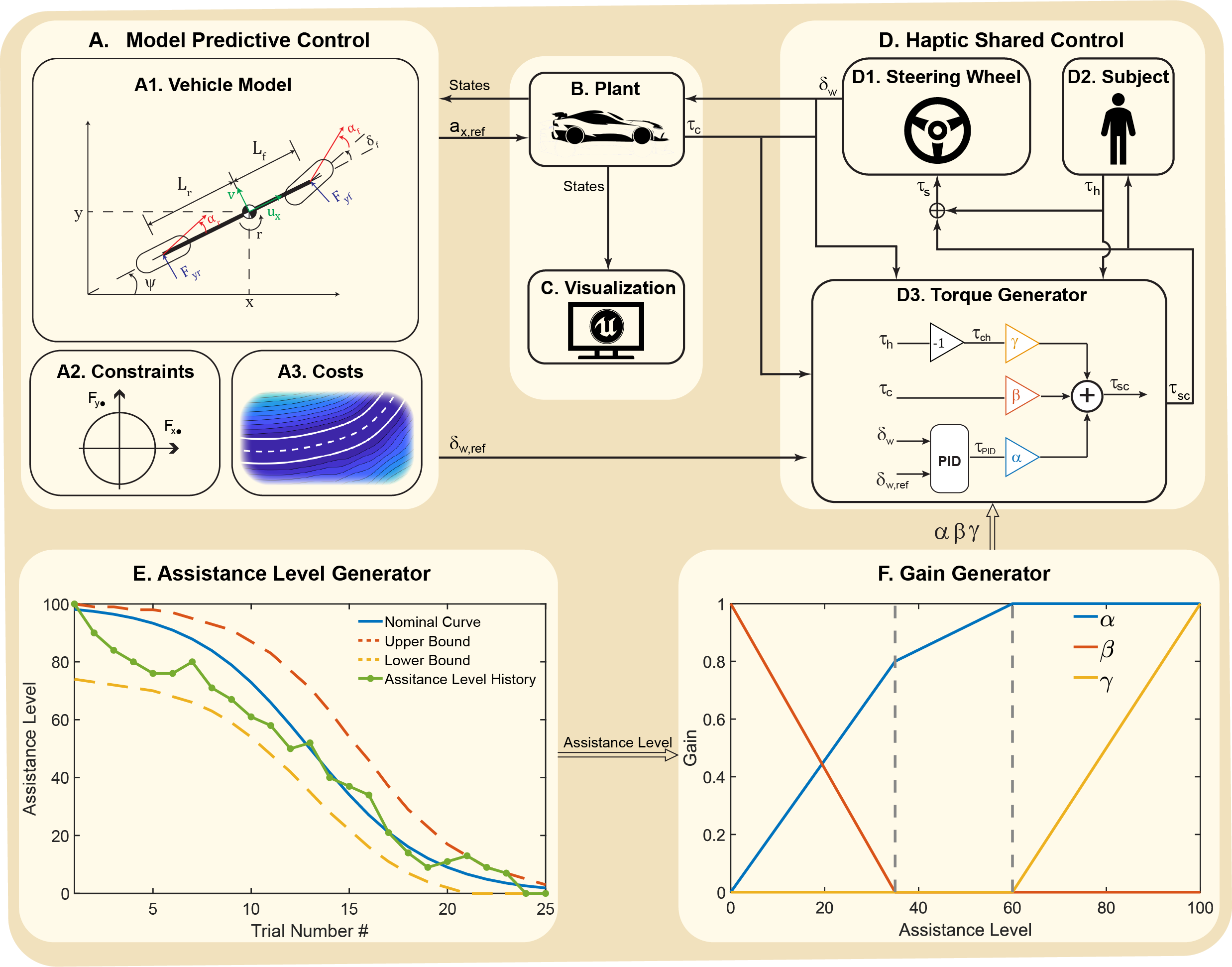
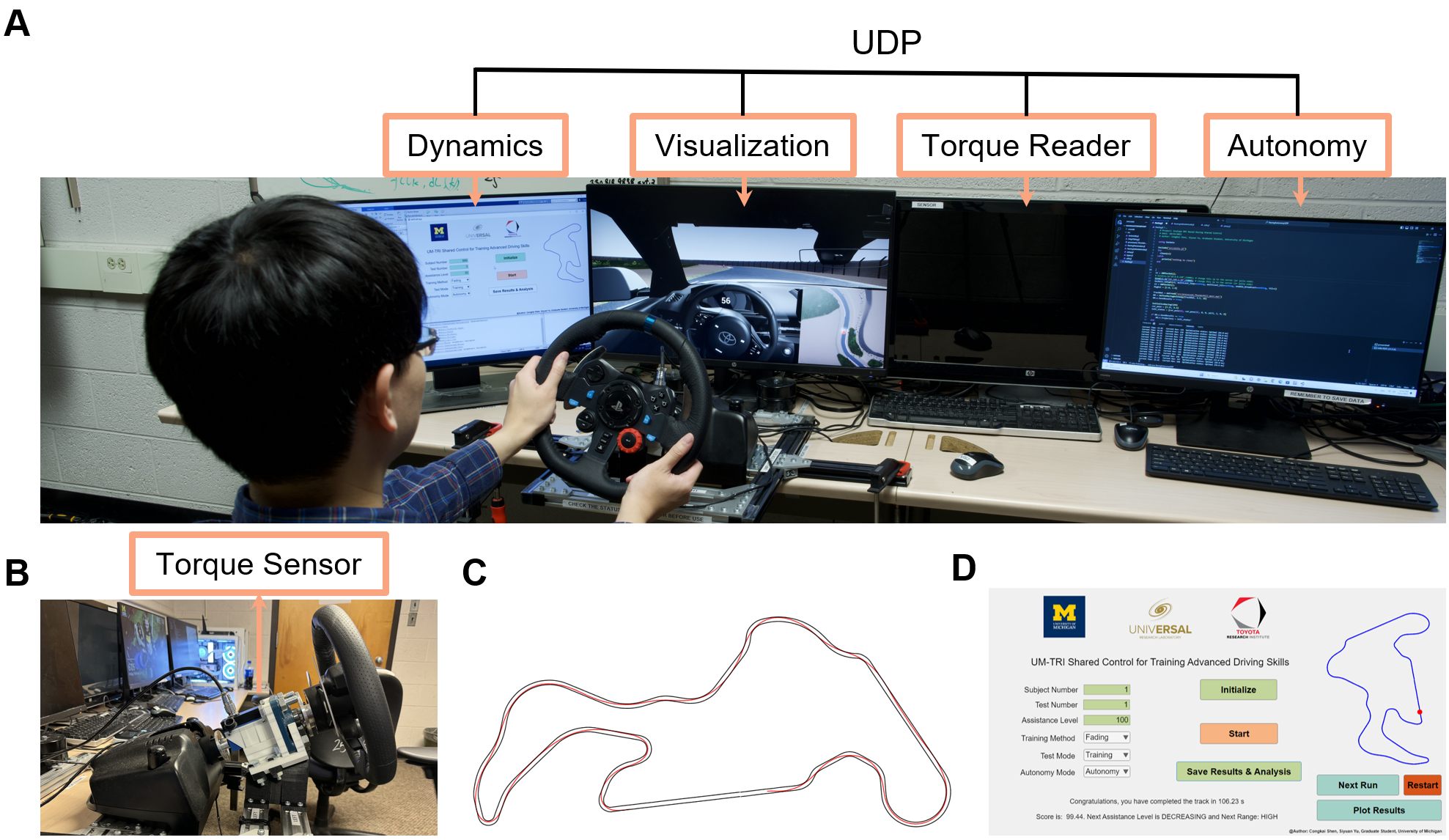
技术框架:该框架包含两个主要组成部分:(1)高性能自动驾驶系统:负责在赛道上实现高性能驾驶,并为共享控制提供参考轨迹和控制力矩。(2)触觉共享控制机制:根据驾驶员的操作和自动驾驶系统的参考,计算辅助力矩,并通过方向盘反馈给驾驶员。此外,框架还包含一个衰减方案,用于根据驾驶员的表现动态调整辅助力矩的大小。整体流程是,驾驶员在虚拟环境中驾驶车辆,自动驾驶系统提供辅助,系统根据驾驶员表现调整辅助强度,最终驾驶员能够独立完成驾驶任务。
关键创新:该论文的关键创新在于将触觉共享控制应用于复杂的高性能驾驶场景,并设计了一种基于驾驶员表现的自适应衰减方案。这种衰减方案能够根据驾驶员的技能水平动态调整辅助强度,避免过度依赖辅助,从而更有效地促进技能习得。与传统的固定辅助或简单任务辅助相比,该方法更具针对性和有效性。
关键设计:衰减方案是关键设计之一。具体实现细节未知,但可以推测其可能基于驾驶员的赛道完成时间、偏离参考轨迹的程度、操作的平稳性等指标来评估驾驶员的表现。辅助力矩的计算可能基于自动驾驶系统的参考力矩和驾驶员的实际力矩之间的差异,并乘以一个衰减系数。具体的损失函数和网络结构(如果使用)未知。
🖼️ 关键图片

📊 实验亮点
人体实验结果表明,使用该触觉共享控制框架训练的驾驶员,在赛道上的表现明显优于自学组和完全辅助组。具体而言,该框架能够帮助驾驶员更快地掌握赛道驾驶技巧,提高赛道完成速度,并减少驾驶过程中的失误,从而获得更好的驾驶性能和一致性。具体性能数据未知。
🎯 应用场景
该研究成果可应用于驾驶员培训、高级驾驶辅助系统(ADAS)开发以及自动驾驶系统的测试与验证。通过触觉共享控制,可以更安全、高效地训练驾驶员掌握紧急避险、赛车等高级驾驶技能。此外,该框架也可用于评估自动驾驶系统的性能,并为开发更智能、更人性化的ADAS提供参考。
📄 摘要(原文)
This study introduces a haptic shared control framework designed to teach human drivers advanced driving skills. In this context, shared control refers to a driving mode where the human driver collaborates with an autonomous driving system to control the steering of a vehicle simultaneously. Advanced driving skills are those necessary to safely push the vehicle to its handling limits in high-performance driving such as racing and emergency obstacle avoidance. Previous research has demonstrated the performance and safety benefits of shared control schemes using both subjective and objective evaluations. However, these schemes have not been assessed for their impact on skill acquisition on complex and demanding tasks. Prior research on long-term skill acquisition either applies haptic shared control to simple tasks or employs other feedback methods like visual and auditory aids. To bridge this gap, this study creates a cyber racing coach framework based on the haptic shared control paradigm and evaluates its performance in helping human drivers acquire high-performance driving skills. The framework introduces (1) an autonomous driving system that is capable of cooperating with humans in a highly performant driving scenario; and (2) a haptic shared control mechanism along with a fading scheme to gradually reduce the steering assistance from autonomy based on the human driver's performance during training. Two benchmarks are considered: self-learning (no assistance) and full assistance during training. Results from a human subject study indicate that the proposed framework helps human drivers develop superior racing skills compared to the benchmarks, resulting in better performance and consistency.