HL-IK: A Lightweight Implementation of Human-Like Inverse Kinematics in Humanoid Arms
作者: Bingjie Chen, Zihan Wang, Zhe Han, Guoping Pan, Yi Cheng, Houde Liu
分类: cs.RO
发布日期: 2025-09-24 (更新: 2025-09-25)
💡 一句话要点
HL-IK:一种轻量级的人形机器人手臂类人逆运动学实现
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 人形机器人 逆运动学 类人运动 肘部先验 时空注意力网络
📋 核心要点
- 传统IK方法侧重于末端执行器跟踪,但生成的机械有效构型往往不符合人类习惯。
- HL-IK通过学习肘部先验,利用FiSTA网络预测肘部姿态,并将其融入优化过程,实现类人运动。
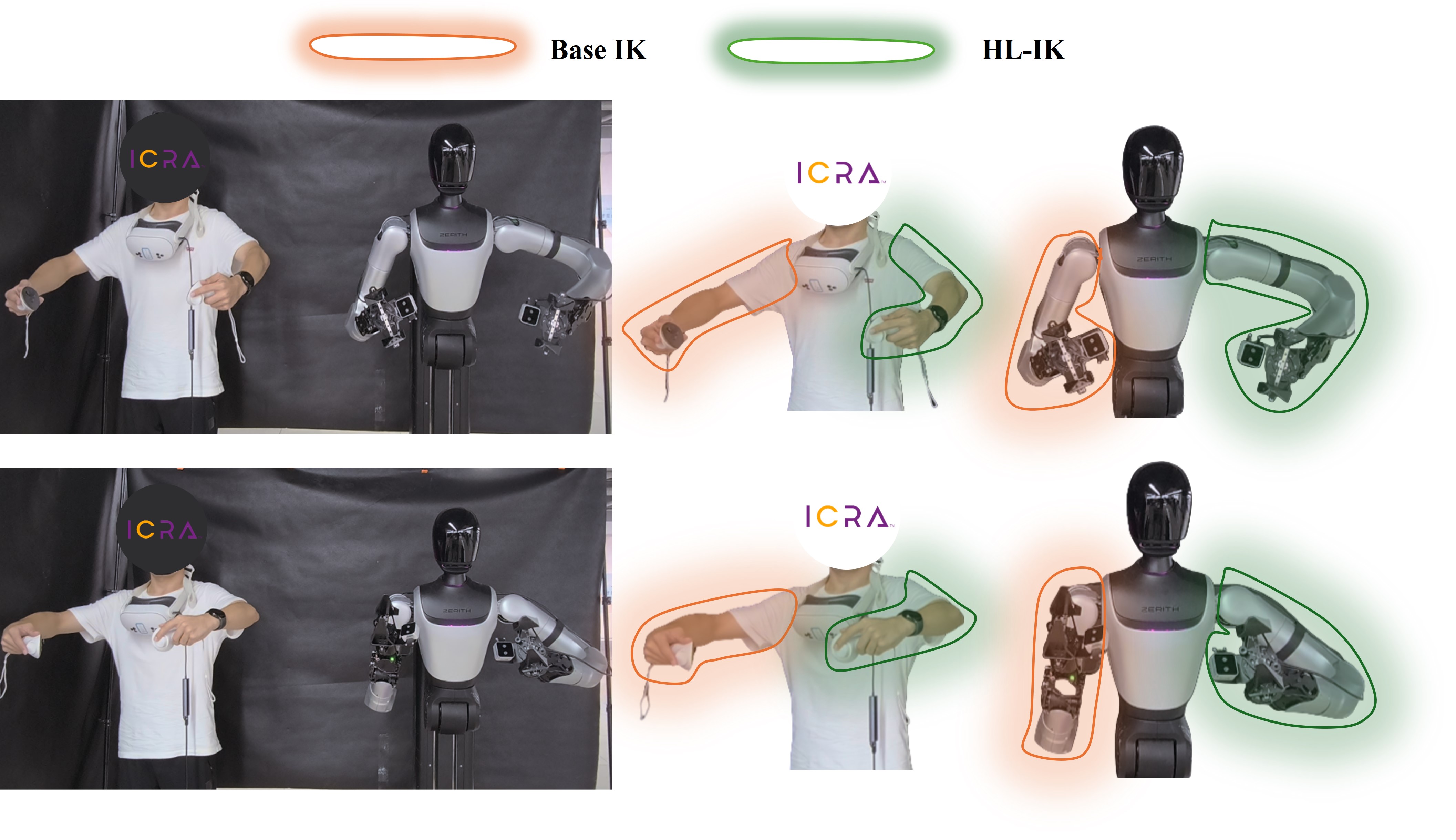
- 实验表明,HL-IK显著降低了手臂相似度误差,并在硬件遥操作中验证了其拟人化效果。
📝 摘要(中文)
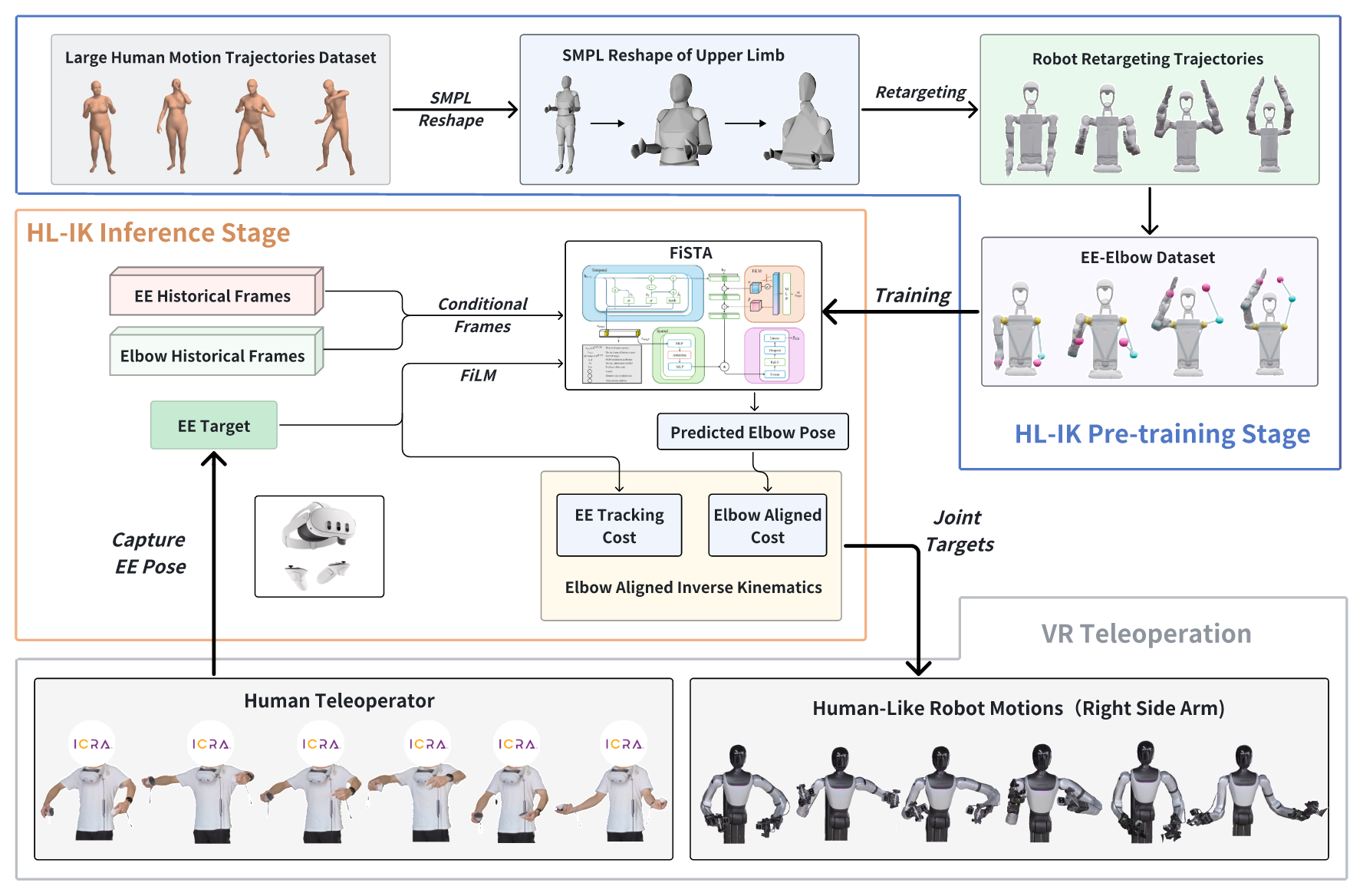
本文提出了一种轻量级的人形机器人手臂类人逆运动学框架(HL-IK),该框架在保持末端执行器(EE)跟踪的同时,塑造整体手臂的姿态,使其看起来更像人类,而无需在运行时进行全身感知。核心思想是学习到的肘部先验:利用大量人类运动数据重新定向到机器人,我们训练了一个FiLM调制的时空注意力网络(FiSTA),以从EE目标和EE-肘部状态的短历史记录中预测下一步的肘部姿态。该预测作为残差项与标准Levenberg-Marquardt优化器中的EE和平滑项一起使用,使HL-IK成为数值IK堆栈的即插即用补充。在超过18.3万个模拟步骤中,HL-IK使手臂相似度位置和方向误差平均降低了30.6%和35.4%,在最具挑战性的轨迹上降低了42.2%和47.4%。在与模拟不同的机器人硬件遥操作进一步证实了拟人化的增益。HL-IK易于集成,可通过我们的流程在各个平台之间进行调整,并增加了最少的计算量,从而为人形机器人实现了类人运动。
🔬 方法详解
问题定义:传统人形机器人逆运动学(IK)方法主要关注末端执行器(EE)的精确跟踪,而忽略了生成姿态的自然性和类人性。这些方法虽然能保证机械上的可行性,但常常产生与人类习惯不符的姿态,限制了机器人在人机交互等场景中的应用。现有方法的痛点在于缺乏对人类运动模式的有效建模和利用。
核心思路:HL-IK的核心思路是引入一个学习到的肘部先验,指导IK求解器生成更符合人类习惯的姿态。具体而言,通过大量人类运动数据训练一个模型,使其能够根据末端执行器的目标位置和历史状态,预测合理的肘部位置。这个预测结果作为约束条件加入到IK优化过程中,从而在保证末端执行器精度的同时,提升姿态的类人性。
技术框架:HL-IK的整体框架可以分为三个主要阶段:1)数据准备:收集大量人类运动数据,并将其重新定向到机器人模型上。2)肘部先验学习:使用FiLM调制的时空注意力网络(FiSTA)训练一个模型,用于预测肘部姿态。3)IK优化:将FiSTA网络的预测结果作为残差项,与末端执行器跟踪和平滑性约束一起,加入到Levenberg-Marquardt优化器中进行求解。
关键创新:HL-IK最重要的技术创新点在于提出了基于学习的肘部先验,并将其有效地融入到传统的数值IK框架中。与现有方法相比,HL-IK无需在运行时进行全身感知,而是通过离线学习人类运动模式,实现了轻量级的类人运动控制。这种方法在保证计算效率的同时,显著提升了姿态的自然性和类人性。
关键设计:FiSTA网络是HL-IK的关键组成部分,它采用FiLM调制机制,允许网络根据末端执行器的目标位置动态调整其预测行为。网络的输入包括末端执行器的目标位置和历史状态,以及肘部的历史状态。损失函数包括末端执行器跟踪误差、肘部预测误差和平滑性约束。Levenberg-Marquardt优化器用于求解IK问题,其中肘部预测误差作为残差项加入到优化目标中。
🖼️ 关键图片

📊 实验亮点
HL-IK在模拟环境中进行了广泛的实验验证。结果表明,与传统IK方法相比,HL-IK使手臂相似度位置和方向误差平均降低了30.6%和35.4%,在最具挑战性的轨迹上降低了42.2%和47.4%。此外,在真实的机器人硬件遥操作实验中,HL-IK也表现出了显著的拟人化增益,验证了其在实际应用中的有效性。
🎯 应用场景
HL-IK具有广泛的应用前景,尤其是在人机协作、远程操作和康复机器人等领域。通过使机器人能够生成更自然、更符合人类习惯的运动,HL-IK可以提升人机交互的效率和舒适度。此外,HL-IK还可以用于生成更逼真的机器人动画,提升虚拟现实和游戏体验。未来,HL-IK有望成为人形机器人运动控制的重要组成部分。
📄 摘要(原文)
Traditional IK methods for redundant humanoid manipulators emphasize end-effector (EE) tracking, frequently producing configurations that are valid mechanically but not human-like. We present Human-Like Inverse Kinematics (HL-IK), a lightweight IK framework that preserves EE tracking while shaping whole-arm configurations to appear human-like, without full-body sensing at runtime. The key idea is a learned elbow prior: using large-scale human motion data retargeted to the robot, we train a FiLM-modulated spatio-temporal attention network (FiSTA) to predict the next-step elbow pose from the EE target and a short history of EE-elbow states.This prediction is incorporated as a small residual alongside EE and smoothness terms in a standard Levenberg-Marquardt optimizer, making HL-IK a drop-in addition to numerical IK stacks. Over 183k simulation steps, HL-IK reduces arm-similarity position and direction error by 30.6% and 35.4% on average, and by 42.2% and 47.4% on the most challenging trajectories. Hardware teleoperation on a robot distinct from simulation further confirms the gains in anthropomorphism. HL-IK is simple to integrate, adaptable across platforms via our pipeline, and adds minimal computation, enabling human-like motions for humanoid robots. Project page: https://hl-ik.github.io/