A Biomimetic Vertebraic Soft Robotic Tail for High-Speed, High-Force Dynamic Maneuvering
作者: Sicong Liu, Jianhui Liu, Fang Chen, Wenjian Yang, Juan Yi, Yu Zheng, Zheng Wang, Wanchao Chi, Chaoyang Song
分类: cs.RO
发布日期: 2025-09-24
备注: 20 pages, 11 figures, 4 tables. Submitted Under Review
💡 一句话要点
提出一种仿生椎骨软体机器人尾部,用于高速、高力动态操作。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 仿生设计 机器人尾部 动力学建模 高动态操作
📋 核心要点
- 现有机器人尾部设计在刚性系统的功率和软体系统的安全性之间存在权衡,刚性尾部惯性大但有安全风险,软体尾部安全但速度和力量不足。
- 论文提出一种仿生椎骨软体机器人尾部,通过被动关节椎柱加固顺应性气动体,解耦承重和驱动,实现高压驱动和高动力学性能。
- 实验结果表明,该尾部实现了超过670°/s的角速度,惯性力和扭矩提升超过200%,并在多种场景下验证了其多功能性和实用性。
📝 摘要(中文)
本文提出了一种仿生椎骨软体机器人(BVSR)尾部,旨在解决刚性系统功率与软体系统安全性之间的权衡问题。该设计采用顺应性气动体,并由受肌肉骨骼结构启发的被动关节椎柱加固。这种混合设计将承重和驱动分离,实现高达6 bar的高压驱动,从而获得卓越的动力学性能,同时保持顺应性。论文开发并验证了一个包含椎骨约束的专用运动学和动力学模型。BVSR尾部实现了超过670°/s的角速度,并产生了高达5.58 N的惯性力和1.21 Nm的扭矩,与非椎骨设计相比提高了200%以上。在快速推车稳定、障碍物规避、高速转向和四足机器人集成等方面的演示验证了其多功能性和在敏捷机器人平台中的实用性。
🔬 方法详解
问题定义:现有机器人尾部设计面临刚性和柔性之间的两难。刚性尾部虽然能够产生较大的惯性力,从而实现快速的姿态调整和运动控制,但在与环境交互时存在潜在的碰撞风险,尤其是在非结构化环境中。而软体尾部虽然具有良好的安全性,但由于其材料的限制,难以提供足够的力和速度,无法满足高动态操作的需求。因此,如何设计一种既能提供足够的动力学性能,又能保证安全性的机器人尾部是一个亟待解决的问题。
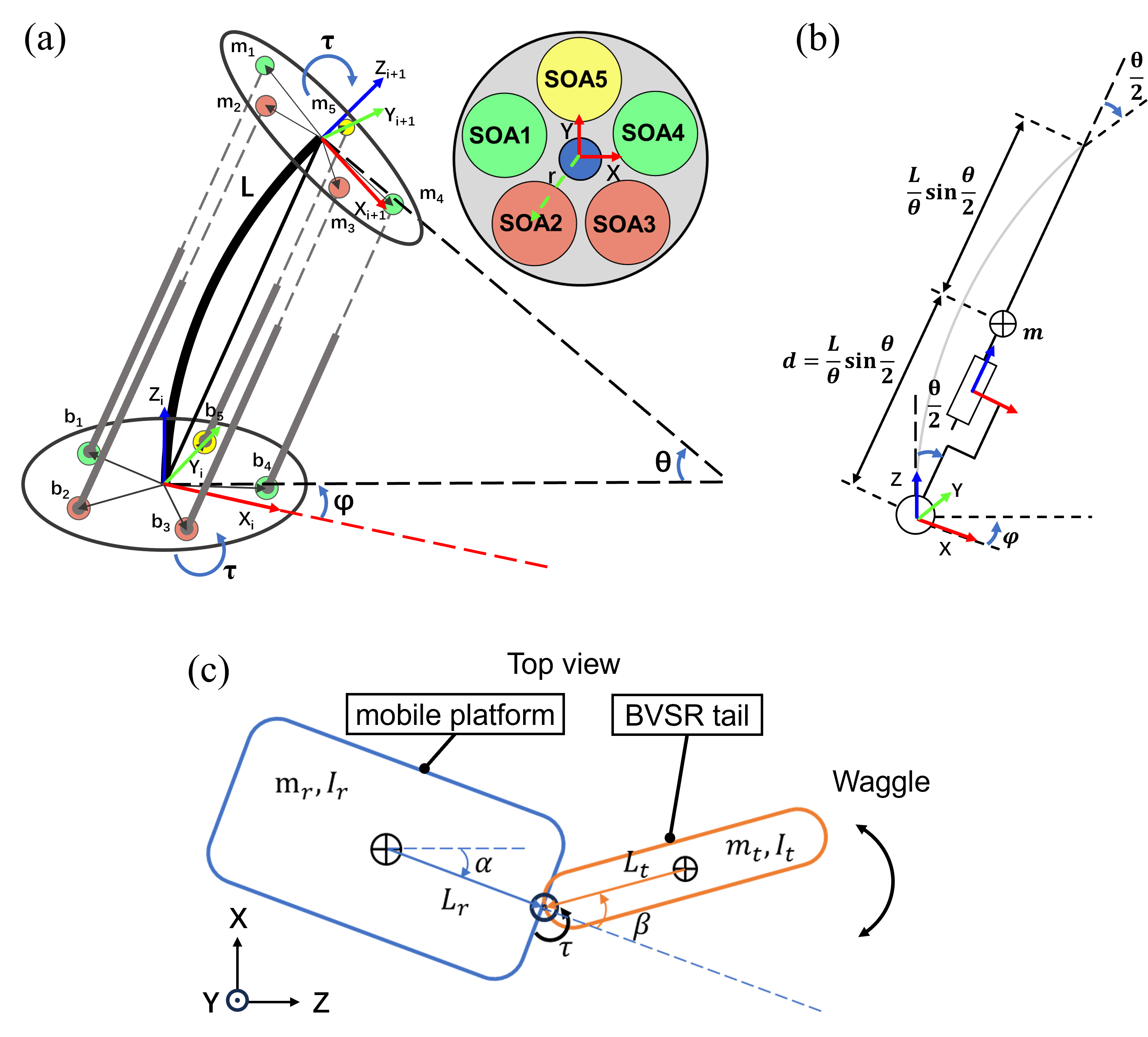
核心思路:本文的核心思路是借鉴生物肌肉骨骼结构,设计一种仿生椎骨软体机器人尾部。该尾部由一个顺应性气动体和一根被动关节椎柱组成。气动体负责提供驱动力,而椎柱负责承受载荷和约束运动。这种设计将承重和驱动分离,使得气动体可以采用高压驱动,从而获得更高的动力学性能。同时,椎柱的被动关节设计保证了尾部的柔顺性,降低了与环境碰撞的风险。
技术框架:该论文提出的BVSR尾部主要包含以下几个部分:1)顺应性气动体:由柔性材料制成,通过充气和放气来产生弯曲运动。2)被动关节椎柱:由多个椎骨通过被动关节连接而成,用于承受载荷和约束运动。3)驱动系统:包括气泵、气阀和控制电路,用于控制气动体的充气和放气。4)控制系统:基于运动学和动力学模型,实现对尾部的精确控制。整体流程为:控制系统根据期望的运动轨迹,控制驱动系统对气动体进行充气和放气,从而驱动尾部运动。椎柱的被动关节设计使得尾部能够适应不同的环境,并降低碰撞风险。
关键创新:该论文的关键创新在于将生物肌肉骨骼结构应用于软体机器人尾部设计。通过引入被动关节椎柱,实现了承重和驱动的分离,从而在保证安全性的前提下,提高了尾部的动力学性能。此外,论文还开发了一个包含椎骨约束的专用运动学和动力学模型,为尾部的精确控制提供了理论基础。
关键设计:在气动体的设计上,采用了多腔室结构,通过控制不同腔室的充气和放气,可以实现尾部的多自由度运动。椎柱的被动关节采用了球铰链结构,保证了关节的灵活性。在控制方面,采用了PID控制算法,并根据运动学和动力学模型对控制参数进行了优化。气压控制范围为0-6 bar,以实现高力输出。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该BVSR尾部能够实现超过670°/s的角速度,并产生高达5.58 N的惯性力和1.21 Nm的扭矩。与非椎骨设计相比,惯性力和扭矩分别提高了200%以上。在快速推车稳定、障碍物规避、高速转向和四足机器人集成等方面的实验验证了该尾部的多功能性和实用性。例如,在高速转向实验中,配备BVSR尾部的机器人能够更快速、更稳定地完成转向动作。
🎯 应用场景
该研究成果可应用于各种敏捷机器人平台,例如搜救机器人、勘探机器人和医疗机器人。仿生椎骨软体机器人尾部能够提高机器人在复杂环境中的稳定性和机动性,使其能够更好地完成各种任务。未来,该技术有望进一步发展,应用于人形机器人和外骨骼等领域,提高人机交互的安全性和舒适性。
📄 摘要(原文)
Robotic tails can enhance the stability and maneuverability of mobile robots, but current designs face a trade-off between the power of rigid systems and the safety of soft ones. Rigid tails generate large inertial effects but pose risks in unstructured environments, while soft tails lack sufficient speed and force. We present a Biomimetic Vertebraic Soft Robotic (BVSR) tail that resolves this challenge through a compliant pneumatic body reinforced by a passively jointed vertebral column inspired by musculoskeletal structures. This hybrid design decouples load-bearing and actuation, enabling high-pressure actuation (up to 6 bar) for superior dynamics while preserving compliance. A dedicated kinematic and dynamic model incorporating vertebral constraints is developed and validated experimentally. The BVSR tail achieves angular velocities above 670°/s and generates inertial forces and torques up to 5.58 N and 1.21 Nm, indicating over 200% improvement compared to non-vertebraic designs. Demonstrations on rapid cart stabilization, obstacle negotiation, high-speed steering, and quadruped integration confirm its versatility and practical utility for agile robotic platforms.