Robot Trajectron V2: A Probabilistic Shared Control Framework for Navigation
作者: Pinhao Song, Yurui Du, Ophelie Saussus, Sofie De Schrijver, Irene Caprara, Peter Janssen, Renaud Detry
分类: cs.RO
发布日期: 2025-09-24
备注: 26 pages, 20 figures
💡 一句话要点
提出Robot Trajectron V2,用于导航的概率共享控制框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 共享控制 意图预测 人机交互 机器人导航 概率模型
📋 核心要点
- 现有导航方法难以准确预测用户意图,尤其是在存在噪声输入和复杂环境时。
- RT-V2结合先验意图模型和后验更新,利用RNN和CVAE建模用户意图,并融合实时输入。
- 实验表明,RT-V2在多种场景下优于现有技术,实现了安全高效的导航辅助。
📝 摘要(中文)
本文提出了一种用于导航的概率共享控制解决方案,名为Robot Trajectron V2 (RT-V2),它能够在人机交互中实现精确的意图预测和安全有效的辅助。RT-V2通过结合先验意图模型和后验更新,联合建模用户的长期行为模式及其噪声的低维控制信号,后验更新考虑了实时用户输入和环境上下文。先验模型使用循环神经网络和条件变分自编码器捕获用户意图的多模态和历史依赖性,而后验模型将其与不确定的用户命令相结合,以推断期望的动作。我们进行了广泛的实验,以验证RT-V2在合成基准、键盘输入的人机交互研究以及非人灵长类动物的脑机接口实验中的性能。结果表明,RT-V2在意图估计方面优于现有技术,提供安全高效的导航支持,并在用户自主性和辅助干预之间充分平衡。通过统一概率建模、强化学习和安全优化,RT-V2为各种辅助技术的共享控制提供了一种有原则且可推广的方法。
🔬 方法详解
问题定义:现有导航系统在共享控制场景下,难以准确预测用户的长期意图,尤其是在用户输入存在噪声、环境复杂多变的情况下。这导致机器人辅助决策困难,无法在用户自主性和安全性之间取得良好平衡。现有方法通常依赖于简单的控制信号或短期行为,忽略了用户意图的历史依赖性和多模态特性。
核心思路:RT-V2的核心思路是构建一个概率共享控制框架,通过联合建模用户的长期行为模式和实时的控制信号,实现对用户意图的准确预测。该框架利用先验意图模型捕获用户的历史行为和潜在目标,并通过后验更新融合实时的用户输入和环境信息,从而推断出用户期望的动作。这种方法能够有效地处理用户输入的不确定性,并在用户自主性和安全性之间进行权衡。
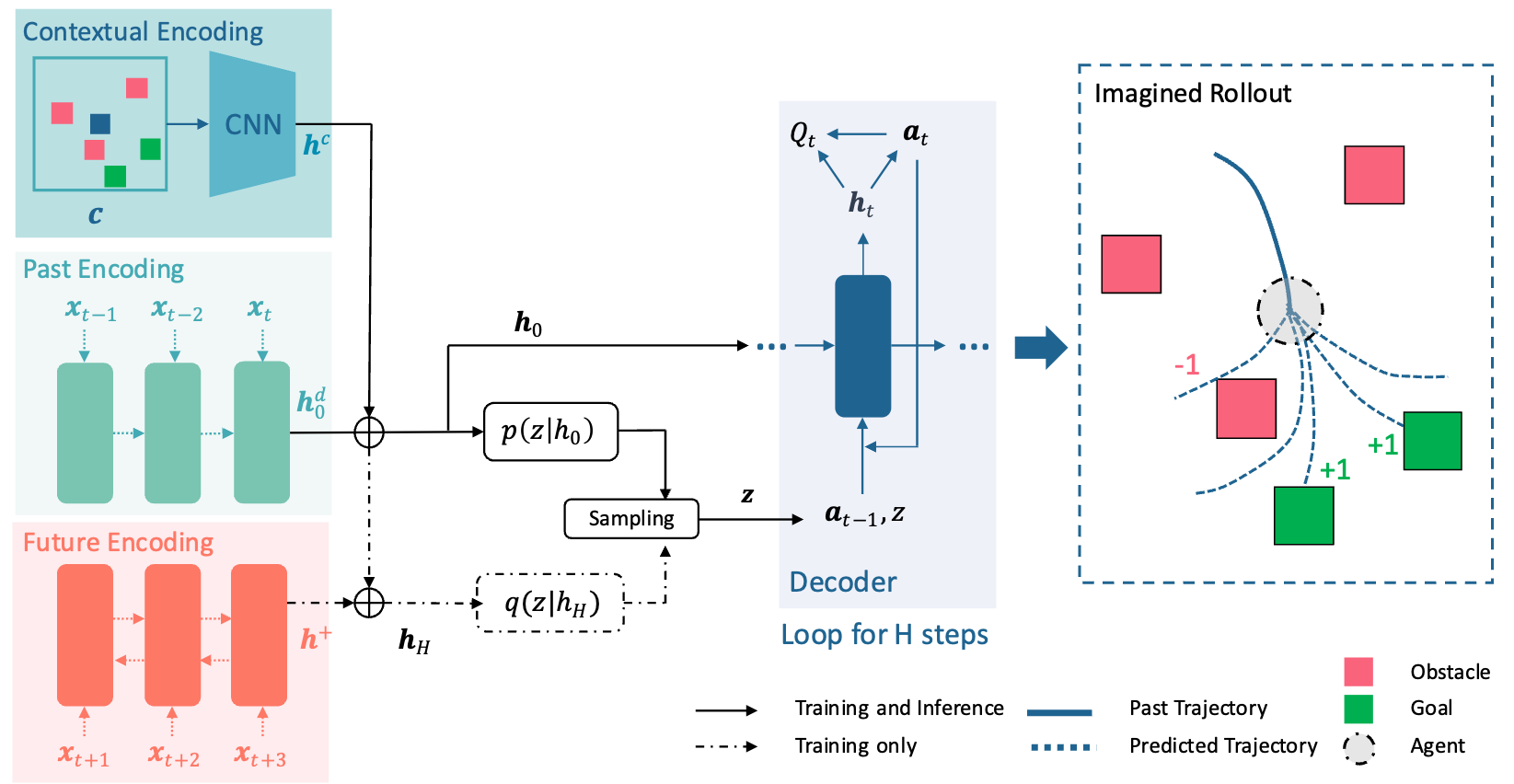
技术框架:RT-V2的整体框架包含以下几个主要模块:1) 先验意图模型:使用循环神经网络(RNN)和条件变分自编码器(CVAE)对用户的历史行为进行建模,学习用户意图的潜在空间表示。2) 后验更新模块:将先验意图模型与实时的用户输入和环境信息相结合,利用贝叶斯推断更新用户意图的概率分布。3) 动作规划模块:根据更新后的用户意图概率分布,生成安全且符合用户意图的机器人动作。4) 共享控制接口:允许用户通过低维控制信号(如键盘输入或脑机接口信号)对机器人进行控制,并根据机器人的辅助决策进行调整。
关键创新:RT-V2的关键创新在于其概率共享控制框架,该框架能够有效地融合用户的长期行为模式和实时的控制信号,实现对用户意图的准确预测。与现有方法相比,RT-V2能够更好地处理用户输入的不确定性,并在用户自主性和安全性之间进行权衡。此外,RT-V2还采用了RNN和CVAE等先进的深度学习技术,能够有效地捕获用户意图的多模态和历史依赖性。
关键设计:RT-V2的关键设计包括:1) 使用GRU或LSTM等循环神经网络对用户的历史行为进行建模。2) 使用条件变分自编码器(CVAE)学习用户意图的潜在空间表示,并生成多样化的未来轨迹预测。3) 使用卡尔曼滤波或粒子滤波等方法对用户输入进行平滑和降噪。4) 使用安全优化算法(如模型预测控制)生成安全且符合用户意图的机器人动作。5) 损失函数的设计需要平衡意图预测的准确性、轨迹的安全性和用户自主性。
🖼️ 关键图片


📊 实验亮点
实验结果表明,RT-V2在合成基准、键盘输入的人机交互研究以及非人灵长类动物的脑机接口实验中均取得了显著的性能提升。在意图估计方面,RT-V2的准确率优于现有技术。在导航安全性方面,RT-V2能够有效地避免碰撞,并保持与用户意图的一致性。在用户自主性方面,RT-V2能够在提供辅助的同时,允许用户保持对机器人的控制。
🎯 应用场景
RT-V2具有广泛的应用前景,可应用于辅助驾驶、医疗康复、人机协作等领域。例如,在辅助驾驶中,RT-V2可以预测驾驶员的意图,并提供安全可靠的辅助驾驶功能。在医疗康复中,RT-V2可以帮助残疾人控制轮椅或机械臂,提高他们的生活质量。在人机协作中,RT-V2可以帮助机器人理解人类的意图,并与人类进行高效协作。
📄 摘要(原文)
We propose a probabilistic shared-control solution for navigation, called Robot Trajectron V2 (RT-V2), that enables accurate intent prediction and safe, effective assistance in human-robot interaction. RT-V2 jointly models a user's long-term behavioral patterns and their noisy, low-dimensional control signals by combining a prior intent model with a posterior update that accounts for real-time user input and environmental context. The prior captures the multimodal and history-dependent nature of user intent using recurrent neural networks and conditional variational autoencoders, while the posterior integrates this with uncertain user commands to infer desired actions. We conduct extensive experiments to validate RT-V2 across synthetic benchmarks, human-computer interaction studies with keyboard input, and brain-machine interface experiments with non-human primates. Results show that RT-V2 outperforms the state of the art in intent estimation, provides safe and efficient navigation support, and adequately balances user autonomy with assistive intervention. By unifying probabilistic modeling, reinforcement learning, and safe optimization, RT-V2 offers a principled and generalizable approach to shared control for diverse assistive technologies.