Look as You Leap: Planning Simultaneous Motion and Perception for High-DOF Robots
作者: Qingxi Meng, Emiliano Flores, Carlos Quintero-Peña, Peizhu Qian, Zachary Kingston, Shannan K. Hamlin, Vaibhav Unhelkar, Lydia E. Kavraki
分类: cs.RO
发布日期: 2025-09-23 (更新: 2026-01-13)
备注: 20 pages, 13 figures, under review
💡 一句话要点
提出基于感知评分引导的并行概率路线图规划器,解决高自由度机器人运动与感知同步规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 主动感知 概率路线图 神经代理模型 GPU并行 高自由度机器人 人机协作
📋 核心要点
- 现有方法难以兼顾高自由度机器人的运动规划和持续感知约束,尤其是在动态环境中。
- 提出一种基于感知评分引导的概率路线图规划器,利用神经代理模型近似感知评分,并融入GPU并行加速。
- 实验表明,该方法在高自由度机器人的静态和动态环境中,均优于现有基线方法。
📝 摘要(中文)
在动态环境中,机器人执行任务通常需要持续主动地感知环境,例如监控或安全保障,需要目标对象或人员始终在视野范围内。然而,同时解决运动和感知任务极具挑战性,因为这些目标通常存在冲突。此外,机器人必须快速响应环境变化,但实时评估感知质量(例如,目标检测置信度)通常成本高昂或不可行。本文针对高自由度机器人在静态和动态环境中,从起始配置到目标配置,同时满足连续感知约束的运动规划问题,提出了一种GPU并行化的感知评分引导概率路线图规划器,并结合神经代理模型(PS-PRM)。与现有的主动感知、可见性感知或基于学习的规划器不同,本文将感知任务和约束直接集成到运动规划公式中。该方法使用神经代理模型来近似感知评分,将其纳入路线图,并利用GPU并行性来实现动态环境中的高效在线重规划。在仿真和真实机器人实验中,针对高自由度机器人进行的评估表明,该规划器优于基线方法。
🔬 方法详解
问题定义:论文旨在解决高自由度机器人在动态环境中,从起始配置到目标配置的运动规划问题,同时满足连续的感知约束。现有方法的痛点在于,运动规划和感知任务通常是分离的,难以同时优化。直接评估感知质量(如目标检测置信度)在运行时成本高昂,且难以快速响应环境变化。此外,现有方法难以处理高自由度机器人的复杂运动空间。
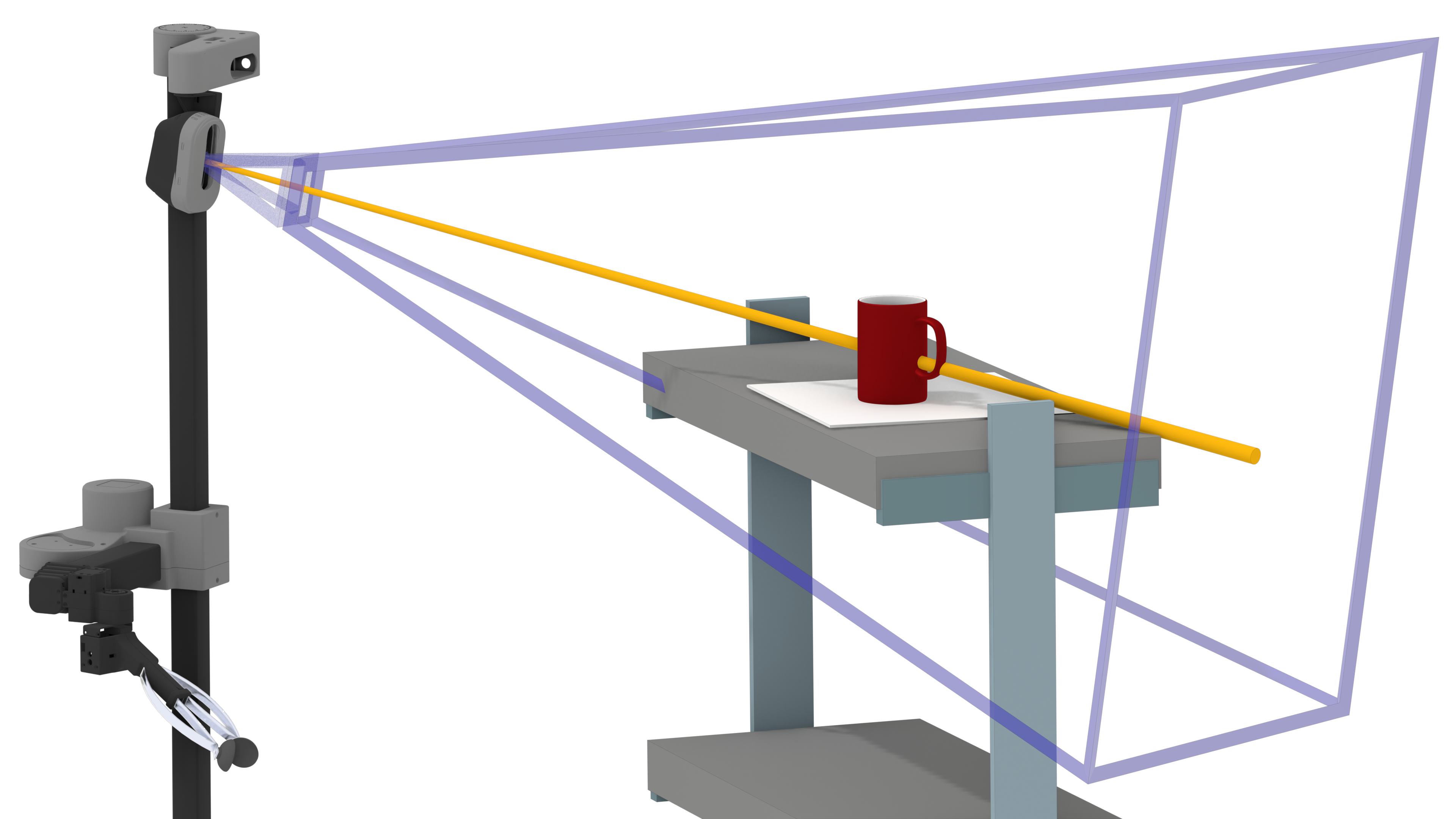
核心思路:论文的核心思路是将感知任务和约束直接集成到运动规划公式中。通过引入感知评分(perception score)来量化感知质量,并将其作为运动规划的优化目标之一。为了解决感知评分计算成本高的问题,论文使用神经代理模型来近似感知评分,从而实现快速评估。此外,利用GPU并行化来加速路线图的构建和搜索,以满足动态环境下的实时性要求。
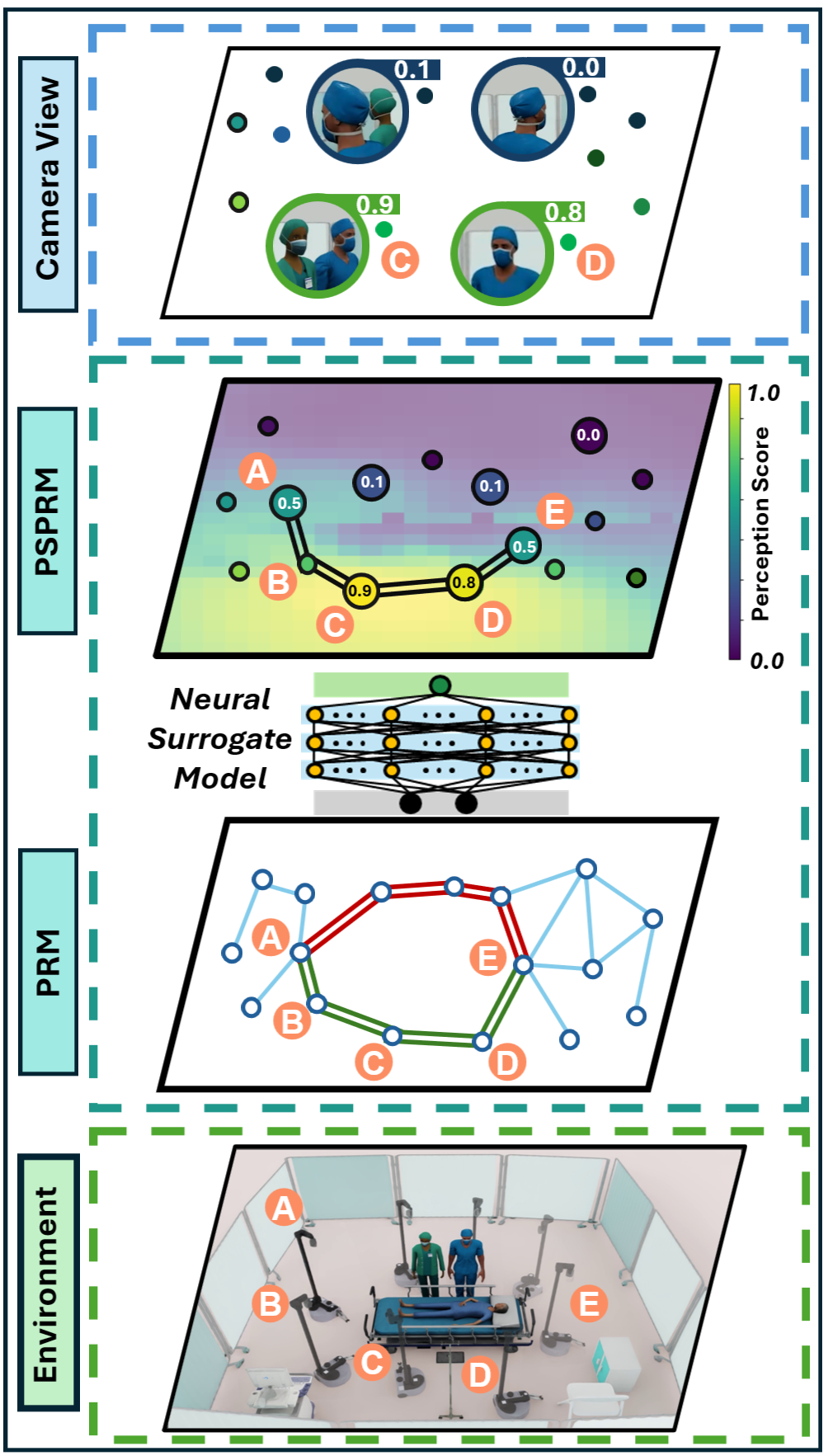
技术框架:整体框架包括以下几个主要模块:1) 感知评分模型:使用神经代理模型来近似感知评分,该模型输入机器人的位姿和环境信息,输出感知评分。2) 概率路线图(PRM)构建:在机器人的配置空间中随机采样,并使用碰撞检测来筛选有效样本。然后,使用感知评分模型来评估每个样本的感知质量,并将感知评分作为边的权重。3) 路径搜索:使用A*算法在PRM中搜索从起始配置到目标配置的最优路径,优化目标包括路径长度和感知评分。4) 在线重规划:当环境发生变化时,使用GPU并行化来快速更新PRM,并重新搜索最优路径。
关键创新:最重要的技术创新点是将感知任务和约束直接集成到运动规划公式中,并使用神经代理模型来近似感知评分。与现有方法的本质区别在于,现有方法通常是先进行运动规划,然后再进行感知验证,而本文的方法是将感知作为运动规划的一部分进行优化。此外,利用GPU并行化来加速路线图的构建和搜索,提高了算法的实时性。
关键设计:神经代理模型采用多层感知机(MLP)结构,输入包括机器人的位姿、关节角度、目标位置等信息,输出感知评分。损失函数包括感知评分的回归损失和路径长度的正则化项。PRM的采样密度和连接半径是关键参数,需要根据具体环境进行调整。GPU并行化主要体现在碰撞检测和感知评分计算上,通过将任务分配到多个GPU核心来加速计算。
🖼️ 关键图片
📊 实验亮点
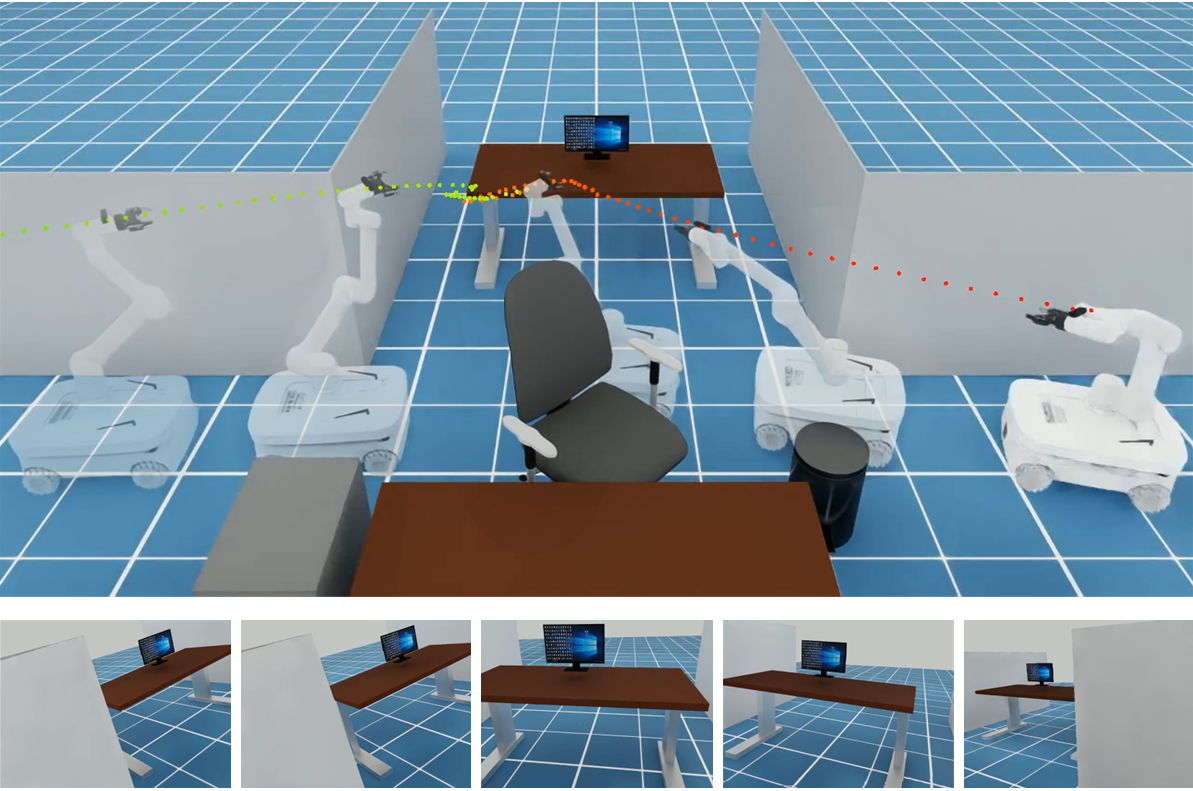
实验结果表明,该方法在静态和动态环境中均优于基线方法。在仿真实验中,该方法能够成功规划出满足感知约束的路径,并且规划时间明显低于基线方法。在真实机器人实验中,该方法能够控制机器人安全地移动,同时保持目标对象始终在视野范围内。具体性能数据未知,但论文强调了在不同环境下的优越性。
🎯 应用场景
该研究成果可应用于人机协作、家庭服务机器人、医疗机器人等领域。在这些场景中,机器人需要在动态环境中安全可靠地执行任务,同时需要持续感知环境信息。例如,在医院中,机器人需要安全地运送药品,同时需要确保病人始终在视野范围内。该研究有助于提高机器人的自主性和适应性,使其能够更好地服务于人类。
📄 摘要(原文)
Most common tasks for robots in dynamic spaces require that the environment is regularly and actively perceived, with many of them explicitly requiring objects or persons to be within view, i.e., for monitoring or safety. However, solving motion and perception tasks simultaneously is challenging, as these objectives often impose conflicting requirements. Furthermore, while robots must react quickly to changes in the environment, directly evaluating the quality of perception (e.g., object detection confidence) is often expensive or infeasible at runtime. This problem is especially important in human-centered environments, such as homes and hospitals, where effective perception is essential for safe and reliable operation. In this work, we address the challenge of solving motion planning problems for high-degree-of-freedom (DoF) robots from a start to a goal configuration with continuous perception constraints under both static and dynamic environments. We propose a GPU-parallelized perception-score-guided probabilistic roadmap planner with a neural surrogate model (PS-PRM). Unlike existing active perception-, visibility-aware or learning-based planners, our work integrates perception tasks and constraints directly into the motion planning formulation. Our method uses a neural surrogate model to approximate perception scores, incorporates them into the roadmap, and leverages GPU parallelism to enable efficient online replanning in dynamic settings. We demonstrate that our planner, evaluated on high-DoF robots, outperforms baseline methods in both static and dynamic environments in both simulation and real-robot experiments.