RoMoCo: Robotic Motion Control Toolbox for Reduced-Order Model-Based Locomotion on Bipedal and Humanoid Robots
作者: Min Dai, Aaron D. Ames
分类: cs.RO
发布日期: 2025-09-23
💡 一句话要点
RoMoCo:用于双足和人形机器人基于降阶模型的运动控制工具箱
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人运动控制 降阶模型 双足机器人 人形机器人 开源工具箱
📋 核心要点
- 现有双足和人形机器人运动控制方法在不同机器人平台上的通用性和可移植性方面存在挑战。
- RoMoCo工具箱通过利用降阶模型进行步态生成,实现了平台无关的控制器设计,从而提高了控制器的通用性。
- 通过在多种机器人上的仿真和硬件实验,验证了RoMoCo工具箱的有效性和性能,证明了其在实际应用中的潜力。
📝 摘要(中文)
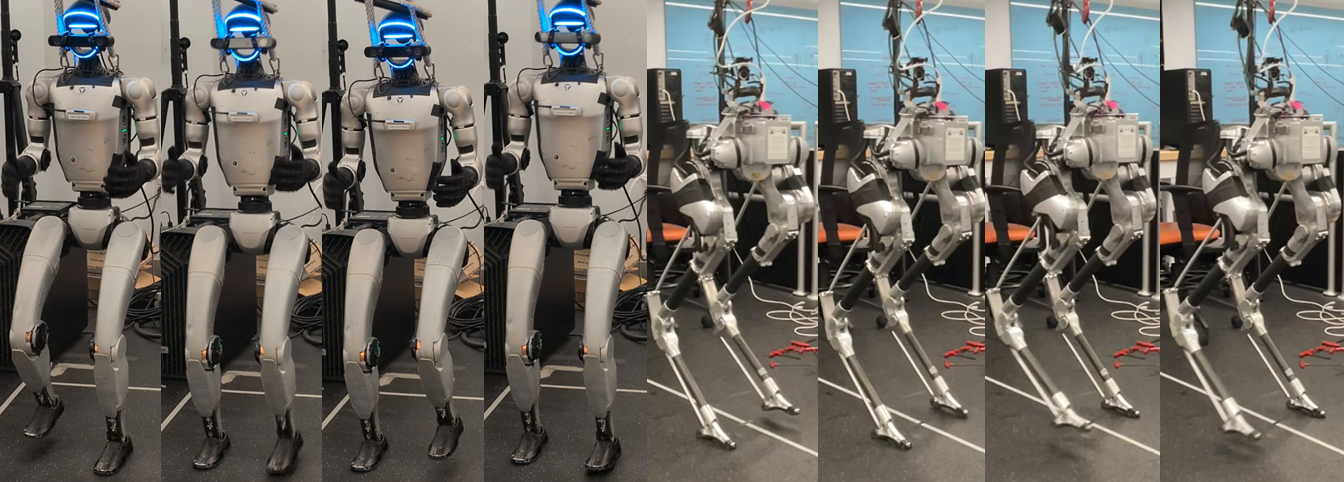
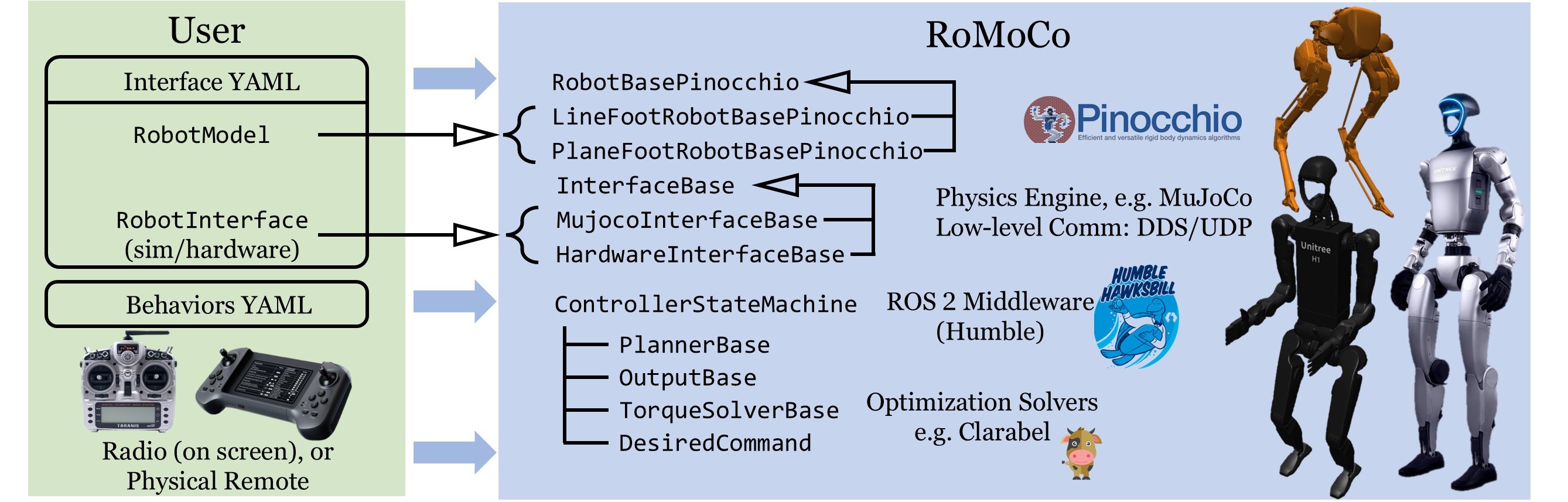
本文介绍RoMoCo,一个开源C++工具箱,用于合成和评估基于降阶模型的双足和人形机器人运动规划器和全身控制器。RoMoCo的模块化架构在一个一致的API下统一了最先进的规划器和全身运动控制器,从而实现了快速原型设计和可重复的基准测试。通过利用降阶模型进行平台无关的步态生成,RoMoCo实现了跨不同机器人的灵活控制器设计。我们通过在Cassie、Unitree H1和G1机器人上的大量仿真展示了其通用性和性能,并通过Cassie和G1人形机器人的硬件实验验证了其在现实世界中的有效性。
🔬 方法详解
问题定义:现有双足和人形机器人的运动控制方法往往依赖于特定的机器人平台,难以在不同机器人之间进行迁移和复用。这限制了研究人员快速开发和测试新的控制算法,也阻碍了机器人技术的进步。此外,全身运动控制器的设计和实现通常非常复杂,需要大量的工程经验和调试时间。
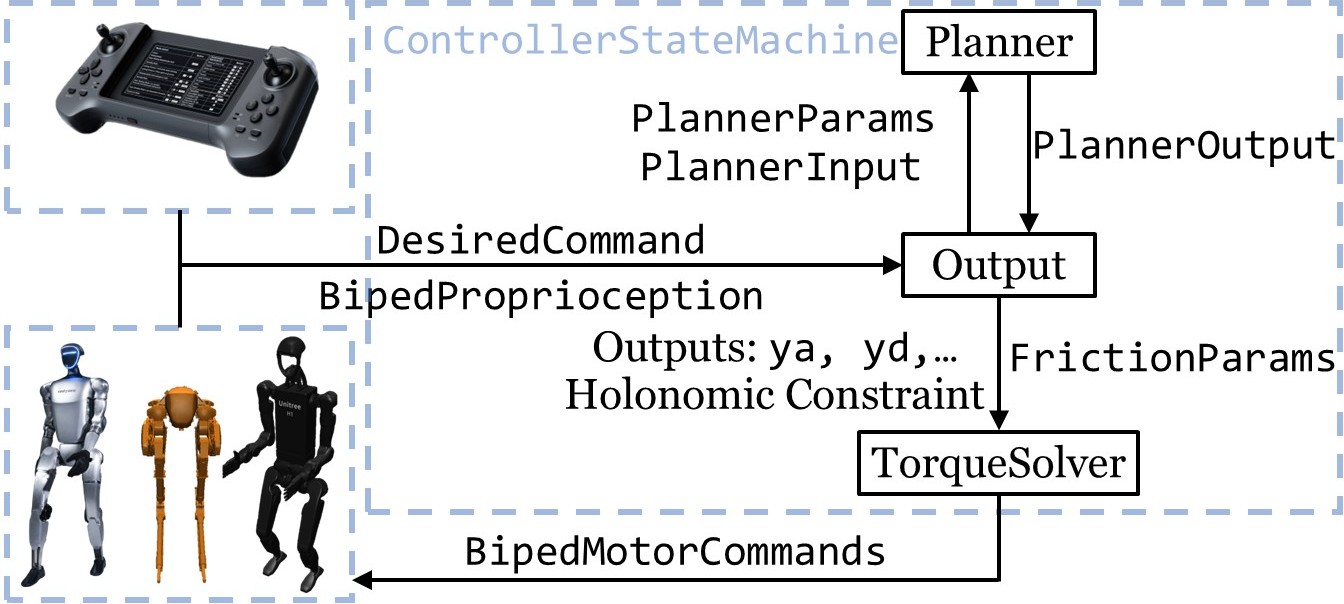
核心思路:RoMoCo的核心思路是利用降阶模型来简化机器人运动的描述,从而实现平台无关的步态生成。通过将复杂的全身运动控制问题分解为降阶模型上的运动规划和全身控制器设计两个阶段,降低了控制器的设计难度,提高了控制器的通用性和可移植性。
技术框架:RoMoCo工具箱的整体架构包括以下几个主要模块:降阶模型库、运动规划器、全身控制器和仿真环境。降阶模型库提供了一系列常用的机器人降阶模型,如线性倒立摆模型(LIPM)和质心动力学模型(CoM Dynamics)。运动规划器基于降阶模型生成机器人的步态轨迹。全身控制器将步态轨迹转化为机器人的关节力矩,从而实现机器人的运动控制。仿真环境用于评估控制器的性能和鲁棒性。
关键创新:RoMoCo最重要的技术创新点在于其模块化架构和平台无关的步态生成方法。模块化架构使得研究人员可以方便地替换和组合不同的模块,从而快速开发和测试新的控制算法。平台无关的步态生成方法使得控制器可以在不同的机器人平台上进行部署,而无需进行大量的修改。
关键设计:RoMoCo的关键设计包括降阶模型的选择、运动规划器的设计和全身控制器的设计。降阶模型的选择需要根据机器人的具体结构和运动特性进行权衡。运动规划器可以采用不同的优化算法,如二次规划(QP)或模型预测控制(MPC)。全身控制器可以采用不同的控制策略,如力矩控制或阻抗控制。此外,RoMoCo还提供了一系列参数设置,用于调整控制器的性能和鲁棒性。
🖼️ 关键图片
📊 实验亮点
论文通过在Cassie、Unitree H1和G1机器人上的仿真实验,验证了RoMoCo工具箱的通用性和性能。实验结果表明,RoMoCo可以有效地生成机器人的步态轨迹,并实现稳定的运动控制。此外,论文还在Cassie和G1人形机器人上进行了硬件实验,验证了RoMoCo在现实世界中的有效性。实验结果表明,RoMoCo可以成功地控制机器人在复杂地形上行走,并完成各种任务。
🎯 应用场景
RoMoCo工具箱可应用于双足和人形机器人的运动控制研究和开发,例如步态生成、平衡控制、运动规划和人机交互。该工具箱可以帮助研究人员快速开发和测试新的控制算法,并将其应用于实际的机器人系统中。此外,RoMoCo还可以用于教育和培训,帮助学生和工程师学习和掌握机器人运动控制技术。
📄 摘要(原文)
We present RoMoCo, an open-source C++ toolbox for the synthesis and evaluation of reduced-order model-based planners and whole-body controllers for bipedal and humanoid robots. RoMoCo's modular architecture unifies state-of-the-art planners and whole-body locomotion controllers under a consistent API, enabling rapid prototyping and reproducible benchmarking. By leveraging reduced-order models for platform-agnostic gait generation, RoMoCo enables flexible controller design across diverse robots. We demonstrate its versatility and performance through extensive simulations on the Cassie, Unitree H1, and G1 robots, and validate its real-world efficacy with hardware experiments on the Cassie and G1 humanoids.