Crater Observing Bio-inspired Rolling Articulator (COBRA)
作者: Adarsh Salagame, Henry Noyes, Alireza Ramezani, Eric Sihite, Arash Kalantari
分类: cs.RO, eess.SY
发布日期: 2025-09-23
💡 一句话要点
COBRA:一种用于月球陨石坑探索的仿生滚动关节机器人
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 月球探测 蛇形机器人 仿生机器人 多模态运动 陨石坑探索
📋 核心要点
- 现有月球车在崎岖地形(如陨石坑)中移动性受限,易被困住,难以有效勘探月球水冰资源。
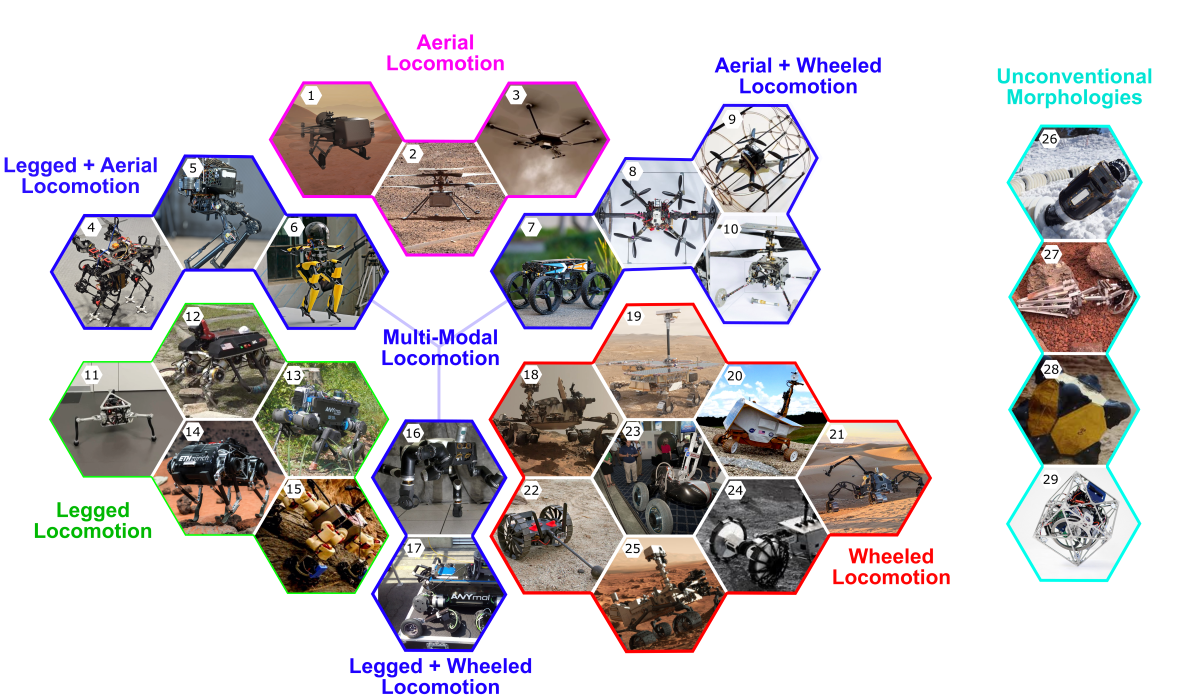
- COBRA是一种仿生蛇形机器人,结合滑行和翻滚两种运动模式,适应不同地形,提高移动效率。
- 通过仿真和实验验证,COBRA在极端地形中展现出良好的鲁棒性和高效的导航能力。
📝 摘要(中文)
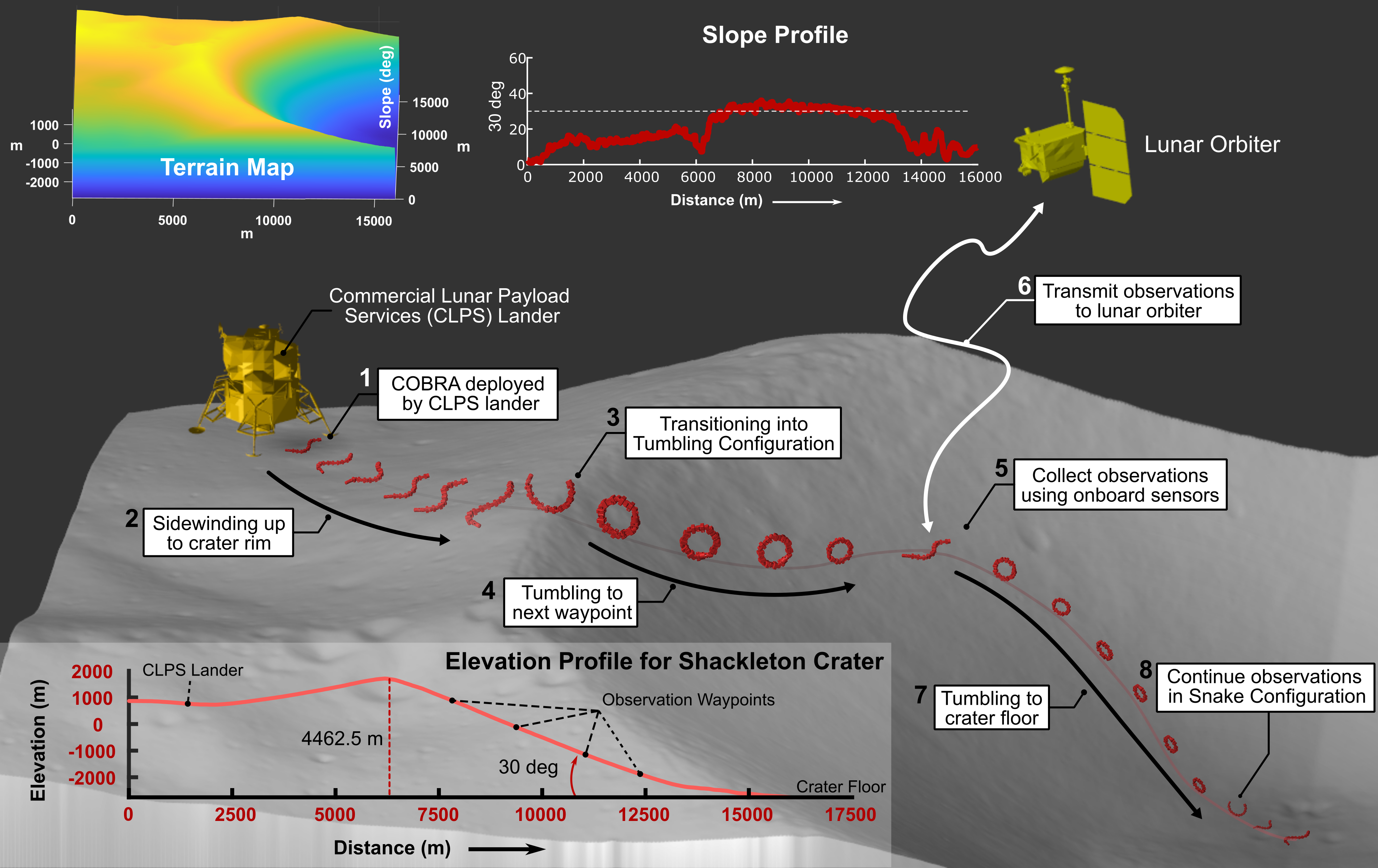
为了在月球上建立可持续的人类基地,美国宇航局计划将月球作为未来火星及更远任务的跳板。在月球永久阴影区的陨石坑中发现水冰至关重要,因为它可以提供饮用水、氧气和火箭燃料。然而,目前获取月球冰矿藏的方法有限。虽然探测车已被用于探索月球表面数十年,但由于存在被困住的高风险,它们在穿越恶劣地形(如永久阴影陨石坑)时面临重大挑战。本报告介绍了一种多模式蛇形机器人COBRA(陨石坑观测仿生滚动关节机器人),旨在克服沙克尔顿陨石坑崎岖环境中的移动性挑战。COBRA结合了滑行和翻滚运动,以适应各种陨石坑地形。在蛇形模式下,它使用侧向移动来穿越平坦或低倾斜表面,而在翻滚模式下,它通过连接头部和尾部形成一个圆形桶状,从而能够在陡峭的斜坡上以最小的能量快速移动。COBRA配备了板载计算机、立体相机、惯性测量单元和关节编码器,可促进实时数据收集和自主操作。本文通过仿真和实验验证,突出了COBRA在极端地形中导航的鲁棒性和效率。
🔬 方法详解
问题定义:论文旨在解决月球车在月球陨石坑等复杂地形中移动性不足的问题。现有月球车在陡峭、崎岖的地形中容易发生侧翻、陷落等情况,导致任务失败。因此,需要一种能够适应多种地形,具有更强通过性的机器人。
核心思路:论文的核心思路是设计一种仿生蛇形机器人,通过模仿蛇的运动方式,实现更灵活、更高效的移动。具体来说,COBRA结合了蛇的滑行和翻滚两种运动模式,使其能够适应不同的地形。
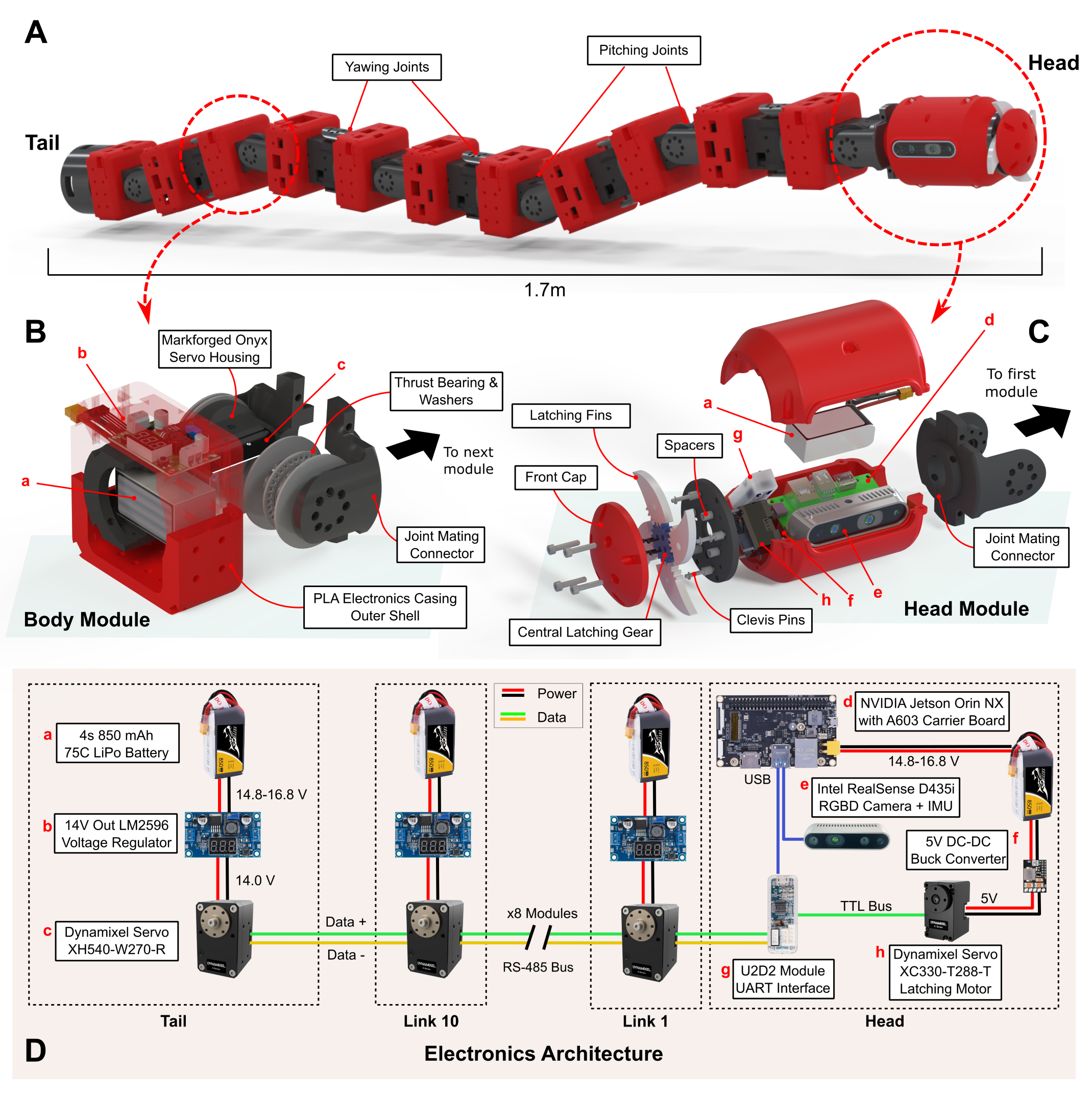
技术框架:COBRA机器人的整体架构包括以下几个主要部分: 1. 机械结构:由多个关节连接的蛇形结构,能够实现滑行和翻滚两种运动模式。 2. 传感器:配备立体相机、惯性测量单元(IMU)和关节编码器,用于感知环境和自身状态。 3. 控制系统:板载计算机,用于处理传感器数据,控制关节运动,实现自主导航。 4. 运动规划:根据地形信息,选择合适的运动模式(滑行或翻滚),并规划运动轨迹。
关键创新:COBRA的关键创新在于其多模态运动能力。传统的月球车通常只能进行轮式移动,而COBRA可以通过滑行和翻滚两种方式移动,从而适应更复杂的地形。这种多模态运动能力显著提高了机器人的通过性和效率。
关键设计:COBRA的关键设计包括: 1. 关节设计:关节的设计需要保证机器人能够灵活地进行滑行和翻滚运动。 2. 运动模式切换:需要设计合理的算法,根据地形信息自动切换运动模式。 3. 控制算法:需要设计鲁棒的控制算法,保证机器人在复杂地形中稳定运动。
🖼️ 关键图片
📊 实验亮点
论文通过仿真和实验验证了COBRA机器人的性能。实验结果表明,COBRA能够在陡峭的斜坡上进行高效的翻滚运动,并且在崎岖地形中具有良好的通过性。这些结果证明了COBRA在极端地形中导航的鲁棒性和效率,为未来的月球探测任务提供了新的解决方案。
🎯 应用场景
COBRA机器人可应用于月球、火星等星球的表面勘探任务,尤其适用于陨石坑、洞穴等复杂地形的探测。其多模态运动能力使其能够高效地获取目标区域的数据,为未来的资源开发和科学研究提供支持。此外,该技术也可应用于灾后救援、管道检测等领域。
📄 摘要(原文)
NASA aims to establish a sustainable human basecamp on the Moon as a stepping stone for future missions to Mars and beyond. The discovery of water ice on the Moon's craters located in permanently shadowed regions, which can provide drinking water, oxygen, and rocket fuel, is therefore of critical importance. However, current methods to access lunar ice deposits are limited. While rovers have been used to explore the lunar surface for decades, they face significant challenges in navigating harsh terrains, such as permanently shadowed craters, due to the high risk of immobilization. This report introduces COBRA (Crater Observing Bio-inspired Rolling Articulator), a multi-modal snake-style robot designed to overcome mobility challenges in Shackleton Crater's rugged environment. COBRA combines slithering and tumbling locomotion to adapt to various crater terrains. In snake mode, it uses sidewinding to traverse flat or low inclined surfaces, while in tumbling mode, it forms a circular barrel by linking its head and tail, enabling rapid movement with minimal energy on steep slopes. Equipped with an onboard computer, stereo camera, inertial measurement unit, and joint encoders, COBRA facilitates real-time data collection and autonomous operation. This paper highlights COBRAs robustness and efficiency in navigating extreme terrains through both simulations and experimental validation.