Guaranteed Robust Nonlinear MPC via Disturbance Feedback
作者: Antoine P. Leeman, Johannes Köhler, Melanie N. Zeilinger
分类: math.OC, cs.RO, eess.SY
发布日期: 2025-09-23
备注: Code: https://github.com/antoineleeman/robust-nonlinear-mpc
🔗 代码/项目: GITHUB
💡 一句话要点
提出基于扰动反馈的鲁棒非线性MPC,保障机器人安全约束与稳定性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 鲁棒模型预测控制 非线性系统 扰动反馈 序列凸规划 机器人控制
📋 核心要点
- 现有方法难以在存在扰动和模型不确定性的情况下,保证机器人系统的安全约束和稳定性。
- 将非线性系统分解为标称模型、扰动反馈控制器和模型误差界限,并联合优化这些组件。
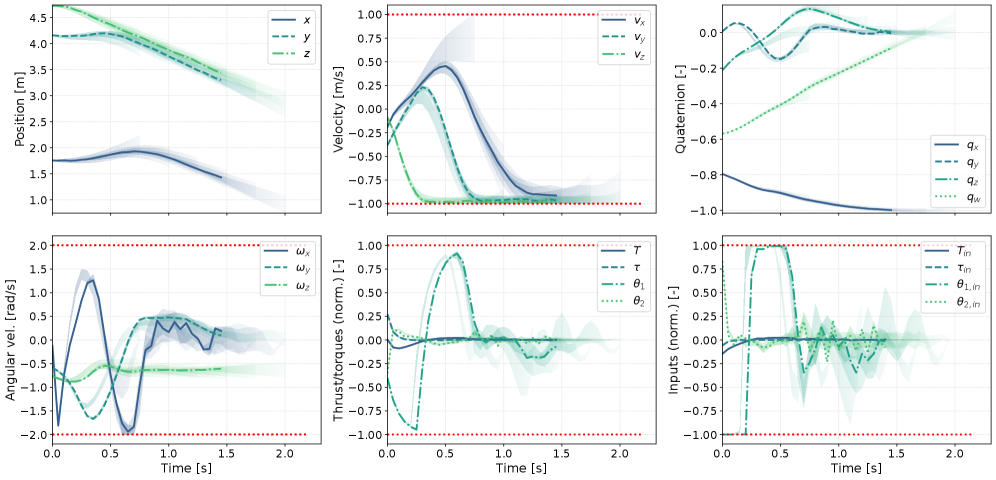
- 通过火箭着陆等多种动力学系统验证,证明了该方法在鲁棒性、实时性和可扩展性方面的有效性。
📝 摘要(中文)
本文提出了一种鲁棒模型预测控制(RMPC)方法,该方法快速、可扩展,并兼容实时实现,旨在解决机器人需要在存在扰动和模型失配的情况下满足安全关键状态和输入约束的问题。该方法保证了鲁棒约束满足、输入-状态稳定性(ISS)和递归可行性。核心思想是将不确定的非线性系统分解为:(i) 标称非线性动态模型,(ii) 扰动反馈控制器,以及 (iii) 模型误差的界限。这些组件使用序列凸规划进行联合优化。利用最新的扰动反馈MPC求解器,可以高效地求解由此产生的凸子问题。该方法已在多种动力学系统上进行了验证,包括具有可操纵推力的火箭着陆问题。开源实现可在https://github.com/antoineleeman/robust-nonlinear-mpc 获取。
🔬 方法详解
问题定义:论文旨在解决非线性机器人系统在存在外部扰动和模型不确定性的情况下,如何保证状态和输入约束的鲁棒性,并确保系统的稳定性。现有方法通常计算复杂度高,难以实时实现,或者对扰动的处理过于保守,导致性能下降。
核心思路:核心思想是将不确定的非线性系统分解为三个部分:一个标称的非线性动态模型,一组扰动反馈控制器,以及对模型误差的界限。通过这种分解,可以将鲁棒控制问题转化为一个更容易求解的优化问题。扰动反馈控制器用于补偿实际系统与标称模型之间的差异,而模型误差界限则用于保证在最坏情况下的性能。
技术框架:该方法采用模型预测控制(MPC)框架,在每个控制周期,求解一个优化问题,以确定最优的控制输入序列。该优化问题以当前状态为初始条件,并考虑了系统的动态模型、状态和输入约束,以及扰动的影响。为了降低计算复杂度,该方法使用序列凸规划(SCP)将非凸的优化问题转化为一系列凸子问题,这些凸子问题可以使用高效的凸优化求解器进行求解。
关键创新:该方法的关键创新在于将扰动反馈控制与模型预测控制相结合,从而在保证鲁棒性的同时,降低了计算复杂度。通过显式地考虑扰动的影响,该方法可以更有效地利用控制资源,从而提高系统的性能。此外,使用序列凸规划使得该方法能够处理复杂的非线性系统。
关键设计:该方法的一个关键设计是扰动反馈控制器的设计。扰动反馈控制器需要能够有效地补偿实际系统与标称模型之间的差异。论文中使用了某种形式的线性反馈控制器,其增益可以通过离线优化或在线自适应的方式进行调整。另一个关键设计是模型误差界限的确定。模型误差界限需要足够紧,以保证鲁棒性,但又不能过于保守,以免影响性能。论文中使用了某种形式的集合论方法来确定模型误差界限。
🖼️ 关键图片


📊 实验亮点
该方法在包括火箭着陆在内的多个动力学系统上进行了验证。实验结果表明,该方法能够有效地保证系统的鲁棒约束满足和输入-状态稳定性。此外,该方法具有良好的实时性和可扩展性,能够处理复杂的非线性系统。开源实现为其他研究者提供了便利,可以加速该领域的发展。
🎯 应用场景
该研究成果可应用于各种需要高可靠性和安全性的机器人系统,例如自动驾驶汽车、无人机、工业机器人和医疗机器人。通过保证在存在扰动和模型不确定性的情况下,系统能够安全稳定地运行,该方法可以提高这些系统的性能和可靠性,并降低事故发生的风险。此外,该方法还可以应用于其他控制领域,例如电力系统和化工过程控制。
📄 摘要(原文)
Robots must satisfy safety-critical state and input constraints despite disturbances and model mismatch. We introduce a robust model predictive control (RMPC) formulation that is fast, scalable, and compatible with real-time implementation. Our formulation guarantees robust constraint satisfaction, input-to-state stability (ISS) and recursive feasibility. The key idea is to decompose the uncertain nonlinear system into (i) a nominal nonlinear dynamic model, (ii) disturbance-feedback controllers, and (iii) bounds on the model error. These components are optimized jointly using sequential convex programming. The resulting convex subproblems are solved efficiently using a recent disturbance-feedback MPC solver. The approach is validated across multiple dynamics, including a rocket-landing problem with steerable thrust. An open-source implementation is available at https://github.com/antoineleeman/robust-nonlinear-mpc.