End-to-End Crop Row Navigation via LiDAR-Based Deep Reinforcement Learning
作者: Ana Luiza Mineiro, Francisco Affonso, Marcelo Becker
分类: cs.RO, cs.AI
发布日期: 2025-09-23 (更新: 2025-11-03)
备注: Accepted to the 22nd International Conference on Advanced Robotics (ICAR 2025). 7 pages
💡 一句话要点
提出基于LiDAR和深度强化学习的端到端作物行导航方法
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 作物行导航 LiDAR 深度强化学习 农业机器人 端到端学习
📋 核心要点
- 现有农业导航方法依赖GNSS,易受作物遮挡影响,且人工控制界面设计复杂。
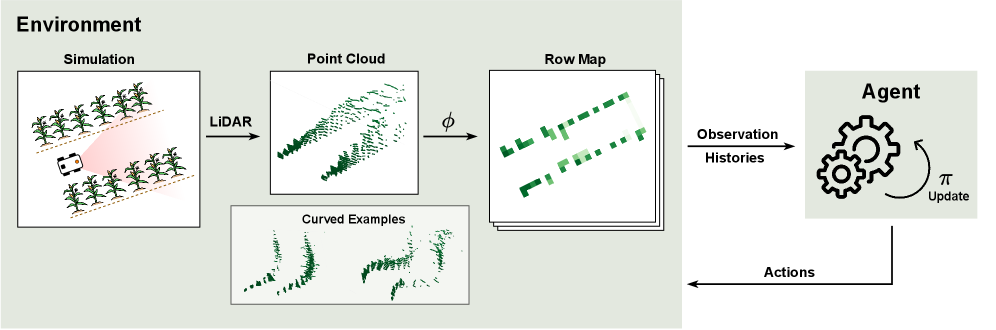
- 提出一种端到端导航系统,直接从3D LiDAR数据学习控制策略,无需人工干预。
- 通过模拟实验验证,在直行作物行中导航成功率达100%,证明了方法的有效性。
📝 摘要(中文)
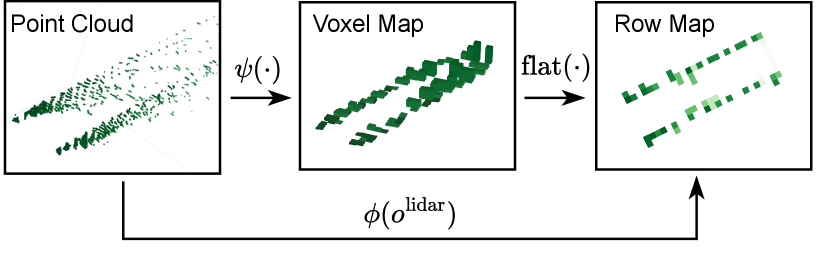
由于GNSS不可靠、作物行杂乱以及光照变化等因素,在作物冠层下的农业环境中实现可靠导航仍然是一个挑战。为了解决这些限制,我们提出了一种基于端到端学习的导航系统,该系统使用完全在模拟环境中训练的深度强化学习策略,将原始3D LiDAR数据直接映射到控制命令。我们的方法包括一种基于体素的降采样策略,该策略将LiDAR输入大小减少了95.83%,从而能够进行有效的策略学习,而无需依赖标记数据集或手动设计的控制界面。该策略已在模拟中得到验证,在直行种植园中实现了100%的成功率,并显示出随着行曲率增加而性能逐渐下降,并在不同的正弦频率和幅度下进行了测试。
🔬 方法详解
问题定义:论文旨在解决在复杂农业环境下,机器人自主导航的问题。现有方法依赖GNSS,但在作物冠层下信号弱,易受干扰。此外,传统方法需要人工设计控制界面,过程繁琐且难以适应不同环境。因此,需要一种能够直接从传感器数据学习控制策略,且无需人工干预的自主导航方法。
核心思路:论文的核心思路是利用深度强化学习,直接从3D LiDAR数据学习控制策略。通过在模拟环境中训练,使机器人能够自主学习如何在作物行间导航,避免了对GNSS的依赖和人工控制界面的设计。这种端到端的学习方式能够更好地适应复杂多变的农业环境。
技术框架:整体框架包括LiDAR数据采集、体素降采样、深度强化学习策略训练和导航控制四个主要阶段。首先,使用3D LiDAR传感器获取环境数据。然后,采用体素降采样方法减少数据量,提高计算效率。接着,利用深度强化学习算法训练导航策略,将LiDAR数据映射到控制命令。最后,将训练好的策略部署到机器人上,实现自主导航。
关键创新:该方法最重要的创新点在于实现了端到端的学习,直接从原始LiDAR数据学习控制策略,无需人工设计特征或控制规则。此外,采用体素降采样策略,有效减少了LiDAR数据的计算量,提高了学习效率。与传统方法相比,该方法具有更强的适应性和鲁棒性。
关键设计:论文采用基于体素的降采样策略,将LiDAR输入大小减少了95.83%,显著降低了计算复杂度。深度强化学习策略采用Actor-Critic架构,Actor网络负责生成控制命令,Critic网络负责评估策略的优劣。奖励函数的设计至关重要,需要综合考虑导航的成功率、平滑性和安全性。具体的网络结构和超参数设置未在摘要中详细说明,属于未知信息。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在模拟环境中取得了显著的成果。在直行种植园中,导航成功率达到100%。随着行曲率的增加,性能逐渐下降,但仍然表现出较强的鲁棒性。体素降采样策略有效减少了LiDAR数据的计算量,提高了学习效率,使得深度强化学习策略能够在合理的时间内完成训练。
🎯 应用场景
该研究成果可应用于农业机器人自主导航、精准农业和智能农机等领域。通过自主导航,机器人可以执行诸如作物监测、喷洒农药、施肥等任务,提高农业生产效率,降低人工成本。未来,该技术有望推广到更广泛的农业场景,助力农业智能化发展。
📄 摘要(原文)
Reliable navigation in under-canopy agricultural environments remains a challenge due to GNSS unreliability, cluttered rows, and variable lighting. To address these limitations, we present an end-to-end learning-based navigation system that maps raw 3D LiDAR data directly to control commands using a deep reinforcement learning policy trained entirely in simulation. Our method includes a voxel-based downsampling strategy that reduces LiDAR input size by 95.83%, enabling efficient policy learning without relying on labeled datasets or manually designed control interfaces. The policy was validated in simulation, achieving a 100% success rate in straight-row plantations and showing a gradual decline in performance as row curvature increased, tested across varying sinusoidal frequencies and amplitudes.