Spatial Envelope MPC: High Performance Driving without a Reference
作者: Siyuan Yu, Congkai Shen, Yufei Xi, James Dallas, Michael Thompson, John Subosits, Hiroshi Yasuda, Tulga Ersal
分类: cs.RO
发布日期: 2025-09-23
💡 一句话要点
提出基于空间包络的MPC框架,无需参考轨迹实现高性能自动驾驶。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 模型预测控制 自动驾驶 空间包络 强化学习 车辆动力学 轨迹规划 优化控制
📋 核心要点
- 现有自动驾驶框架依赖参考轨迹,在车辆动态极限下性能受限,难以应对复杂场景。
- 提出基于空间包络的MPC框架,直接优化车辆在安全可驾驶区域内的运动,无需参考轨迹。
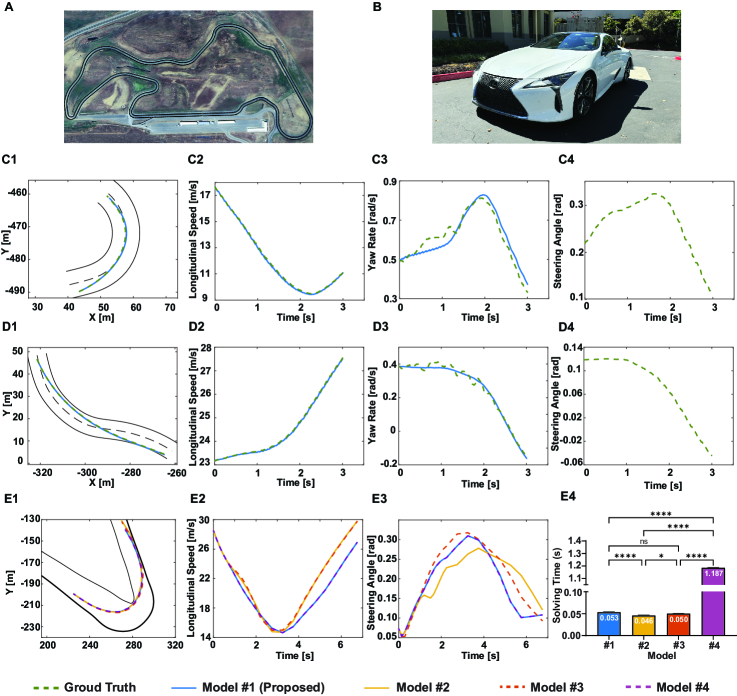
- 通过仿真和实车实验验证,该框架在赛车、避撞和越野导航等任务中表现出高性能。
📝 摘要(中文)
本文提出了一种新颖的基于包络的模型预测控制(MPC)框架,旨在使自动驾驶车辆能够在各种场景中处理高性能驾驶,而无需预定义的参考轨迹。 在高性能自动驾驶中,在车辆的动态极限下安全运行需要一个能够考虑关键车辆动力学和环境约束的实时规划和控制框架,而遵循预定义的参考轨迹是次优的甚至不可行的。 然而,目前最先进的规划和控制框架主要基于参考轨迹,这限制了它们在这种情形下的性能。 为了解决这个差距,这项工作首先引入了一种计算效率高的车辆动力学模型,该模型专为基于优化的控制而设计,以及一种连续可微的数学公式,该公式准确地捕获了整个可驾驶包络。 这种新颖的模型和公式允许将动态可行性和安全约束直接集成到统一的规划和控制框架中,从而消除了对预定义参考轨迹的需要。 通过将强化学习与优化技术相结合,解决了包络规划的挑战,即最大程度地逼近安全可驾驶区域。 该框架通过仿真和真实世界的实验得到验证,证明了其在各种任务中的高性能,包括赛车、紧急避撞和越野导航。 这些结果突出了该框架的可扩展性和在各种场景中的广泛适用性。
🔬 方法详解
问题定义:现有高性能自动驾驶方案严重依赖预定义的参考轨迹。然而,在车辆接近其动态极限或面对复杂环境时,精确跟踪参考轨迹变得困难甚至不可能。这限制了车辆的性能和安全性,尤其是在需要快速响应和灵活决策的场景中。因此,需要一种无需参考轨迹,直接在可行区域内进行规划和控制的方法。
核心思路:该论文的核心思路是使用“空间包络”的概念来表示车辆的安全可驾驶区域,并在此基础上进行模型预测控制(MPC)。通过优化车辆在包络内的运动轨迹,可以避免对参考轨迹的依赖,并直接考虑车辆的动力学约束和环境限制。这种方法允许车辆在动态极限下运行,并能更好地适应复杂和不确定的环境。
技术框架:该框架包含以下主要模块:1) 车辆动力学模型:一个计算效率高的车辆动力学模型,用于预测车辆的未来状态。2) 可驾驶包络建模:一个连续可微的数学公式,用于准确描述车辆的安全可驾驶区域。3) MPC优化器:一个基于优化的控制器,用于在可驾驶包络内生成最优的运动轨迹。4) 包络规划器:结合强化学习和优化技术,用于最大化安全可驾驶区域。整体流程是,首先使用包络规划器确定安全区域,然后MPC优化器在此区域内规划轨迹,最后车辆执行该轨迹。
关键创新:该论文的关键创新在于提出了基于空间包络的MPC框架,该框架无需参考轨迹即可实现高性能自动驾驶。与传统的基于参考轨迹的MPC方法相比,该框架能够更好地处理车辆动态极限和复杂环境,并能直接优化车辆在安全区域内的运动。此外,该论文还提出了一种计算效率高的车辆动力学模型和一种连续可微的可驾驶包络建模方法,为该框架的实现提供了基础。
关键设计:车辆动力学模型的设计需要平衡计算效率和精度,以便在实时控制中使用。可驾驶包络的建模需要考虑车辆的物理限制、环境约束和安全裕度。MPC优化器的目标函数需要同时考虑轨迹的平滑性、速度和安全性。包络规划器使用强化学习来学习如何最大化安全可驾驶区域,并使用优化技术来确保包络的连续性和可微性。
🖼️ 关键图片


📊 实验亮点
通过仿真和实车实验,该框架在赛车、紧急避撞和越野导航等任务中表现出高性能。例如,在赛车实验中,该框架能够使车辆以更高的速度通过弯道,并缩短 lap time。在紧急避撞实验中,该框架能够使车辆更有效地避开障碍物,并减少碰撞的风险。在越野导航实验中,该框架能够使车辆在复杂地形中安全行驶,并避免陷入困境。
🎯 应用场景
该研究成果可应用于各种自动驾驶场景,包括赛车、紧急避撞、越野导航和城市交通。该框架能够提高自动驾驶车辆在复杂和不确定环境中的性能和安全性,并有望推动自动驾驶技术的广泛应用。此外,该方法还可以扩展到其他机器人领域,例如无人机和水下机器人。
📄 摘要(原文)
This paper presents a novel envelope based model predictive control (MPC) framework designed to enable autonomous vehicles to handle high performance driving across a wide range of scenarios without a predefined reference. In high performance autonomous driving, safe operation at the vehicle's dynamic limits requires a real time planning and control framework capable of accounting for key vehicle dynamics and environmental constraints when following a predefined reference trajectory is suboptimal or even infeasible. State of the art planning and control frameworks, however, are predominantly reference based, which limits their performance in such situations. To address this gap, this work first introduces a computationally efficient vehicle dynamics model tailored for optimization based control and a continuously differentiable mathematical formulation that accurately captures the entire drivable envelope. This novel model and formulation allow for the direct integration of dynamic feasibility and safety constraints into a unified planning and control framework, thereby removing the necessity for predefined references. The challenge of envelope planning, which refers to maximally approximating the safe drivable area, is tackled by combining reinforcement learning with optimization techniques. The framework is validated through both simulations and real world experiments, demonstrating its high performance across a variety of tasks, including racing, emergency collision avoidance and off road navigation. These results highlight the framework's scalability and broad applicability across a diverse set of scenarios.