AERO-MPPI: Anchor-Guided Ensemble Trajectory Optimization for Agile Mapless Drone Navigation
作者: Xin Chen, Rui Huang, Longbin Tang, Lin Zhao
分类: cs.RO, eess.SY
发布日期: 2025-09-22
💡 一句话要点
AERO-MPPI:面向复杂环境无人机敏捷导航的锚点引导集成轨迹优化
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机导航 敏捷飞行 无图导航 模型预测控制 GPU加速 轨迹优化 LiDAR点云 路径规划
📋 核心要点
- 传统无人机导航依赖建图,计算量大且误差累积,难以满足复杂环境下的敏捷飞行需求。
- AERO-MPPI通过锚点引导的集成MPPI优化,融合感知与规划,利用GPU加速实现实时导航。
- 实验表明,AERO-MPPI在复杂环境中能实现7m/s以上的稳定飞行,成功率超80%,优于现有方法。
📝 摘要(中文)
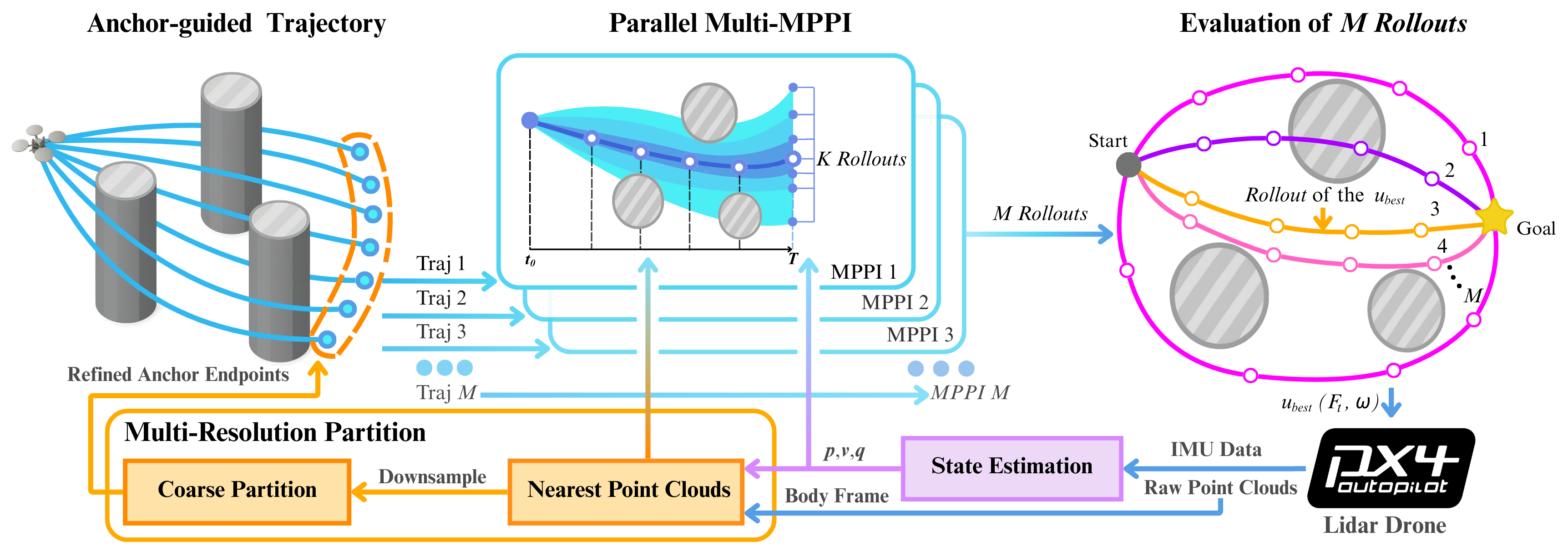
在复杂3D环境中实现无人机的敏捷无图导航面临巨大挑战。传统的建图-规划-控制流程计算成本高昂,且会传递估计误差。我们提出了AERO-MPPI,一个完全由GPU加速的框架,通过锚点引导的模型预测路径积分(MPPI)优化器集成,统一了感知和规划。具体来说,我们设计了一种多分辨率LiDAR点云表示,快速提取空间分布的“锚点”作为前瞻中间端点,并从中构建多项式轨迹引导,以探索不同的同伦路径类别。在每个规划步骤中,我们并行运行多个MPPI实例,并使用一个两阶段多目标代价函数评估它们,该函数平衡了避障和目标到达。AERO-MPPI完全使用NVIDIA Warp GPU内核实现,实现了实时的机载操作,并减轻了单MPPI方法的局部最小值失效问题。在森林、垂直和倾斜环境中的大量模拟表明,该方法能够以高于7米/秒的速度持续可靠飞行,成功率高于80%,并且轨迹比最先进的基线更平滑。在配备NVIDIA Jetson Orin NX 16G的LiDAR无人机上的真实世界实验证实,AERO-MPPI可以在机载实时运行,并在复杂的杂乱环境中始终实现安全、敏捷和稳健的飞行。代码将在论文被接受后开源。
🔬 方法详解
问题定义:论文旨在解决复杂三维环境中无人机在无地图条件下的敏捷导航问题。现有方法,如传统的建图-规划-控制流程,计算成本高,容易累积估计误差,难以满足实时性和鲁棒性要求,尤其是在高动态和复杂环境中。
核心思路:AERO-MPPI的核心思路是将感知和规划融合到一个统一的框架中,利用GPU加速的集成MPPI优化器,通过锚点引导探索不同的轨迹路径。这种方法避免了显式建图,降低了计算复杂度,并能更好地应对环境的不确定性。通过并行运行多个MPPI实例,可以有效避免陷入局部最小值。
技术框架:AERO-MPPI框架主要包含以下几个阶段:1) 多分辨率LiDAR点云表示,用于快速提取空间分布的“锚点”;2) 基于锚点的多项式轨迹生成,作为MPPI的引导;3) 并行运行多个MPPI实例,每个实例探索不同的轨迹路径;4) 两阶段多目标代价函数评估,平衡避障和目标到达;5) 基于NVIDIA Warp GPU内核的完全GPU加速实现。
关键创新:AERO-MPPI的关键创新在于:1) 提出了一种锚点引导的轨迹优化方法,利用空间分布的锚点作为中间目标,引导MPPI探索不同的同伦路径;2) 采用集成MPPI优化器,并行运行多个MPPI实例,有效避免了局部最小值问题;3) 完全基于GPU加速,实现了实时机载操作。
关键设计:AERO-MPPI的关键设计包括:1) 多分辨率点云表示,用于快速提取锚点;2) 多项式轨迹的参数化方式,用于生成平滑的引导轨迹;3) 两阶段代价函数的设计,用于平衡避障和目标到达;4) NVIDIA Warp GPU内核的使用,用于实现高效的并行计算。
🖼️ 关键图片


📊 实验亮点
AERO-MPPI在模拟和真实世界实验中均表现出色。在复杂环境(森林、垂直和倾斜地形)的模拟中,AERO-MPPI能够以高于7 m/s的速度持续可靠飞行,成功率高于80%,并且轨迹比现有方法更平滑。在配备NVIDIA Jetson Orin NX 16G的LiDAR无人机上的真实世界实验证实,AERO-MPPI可以在机载实时运行,并在复杂的杂乱环境中始终实现安全、敏捷和稳健的飞行。
🎯 应用场景
AERO-MPPI具有广泛的应用前景,包括:无人机自主巡检、搜索救援、物流配送、农业植保等。该方法能够使无人机在复杂、动态和无地图环境中实现安全、敏捷和稳健的飞行,提高无人机的自主性和适应性。未来,该技术有望应用于更广泛的机器人领域,例如地面机器人和水下机器人。
📄 摘要(原文)
Agile mapless navigation in cluttered 3D environments poses significant challenges for autonomous drones. Conventional mapping-planning-control pipelines incur high computational cost and propagate estimation errors. We present AERO-MPPI, a fully GPU-accelerated framework that unifies perception and planning through an anchor-guided ensemble of Model Predictive Path Integral (MPPI) optimizers. Specifically, we design a multi-resolution LiDAR point-cloud representation that rapidly extracts spatially distributed "anchors" as look-ahead intermediate endpoints, from which we construct polynomial trajectory guides to explore distinct homotopy path classes. At each planning step, we run multiple MPPI instances in parallel and evaluate them with a two-stage multi-objective cost that balances collision avoidance and goal reaching. Implemented entirely with NVIDIA Warp GPU kernels, AERO-MPPI achieves real-time onboard operation and mitigates the local-minima failures of single-MPPI approaches. Extensive simulations in forests, verticals, and inclines demonstrate sustained reliable flight above 7 m/s, with success rates above 80% and smoother trajectories compared to state-of-the-art baselines. Real-world experiments on a LiDAR-equipped quadrotor with NVIDIA Jetson Orin NX 16G confirm that AERO-MPPI runs in real time onboard and consistently achieves safe, agile, and robust flight in complex cluttered environments. The code will be open-sourced upon acceptance of the paper.