Learning and Optimization with 3D Orientations
作者: Alexandros Ntagkas, Constantinos Tsakonas, Chairi Kiourt, Konstantinos Chatzilygeroudis
分类: cs.RO, cs.LG, math.OC
发布日期: 2025-09-21
备注: 9 pages, 11 figures
💡 一句话要点
针对3D姿态表示学习与优化,提出统一框架与基准测试
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 3D姿态表示 机器人学习 优化算法 基准测试 李群代数
📋 核心要点
- 现有姿态表示方法繁多,缺乏统一的比较和选择标准,给机器人学习和优化任务带来挑战。
- 论文旨在提供一个清晰、简洁的姿态表示和相关技巧的统一框架,并进行基准测试。
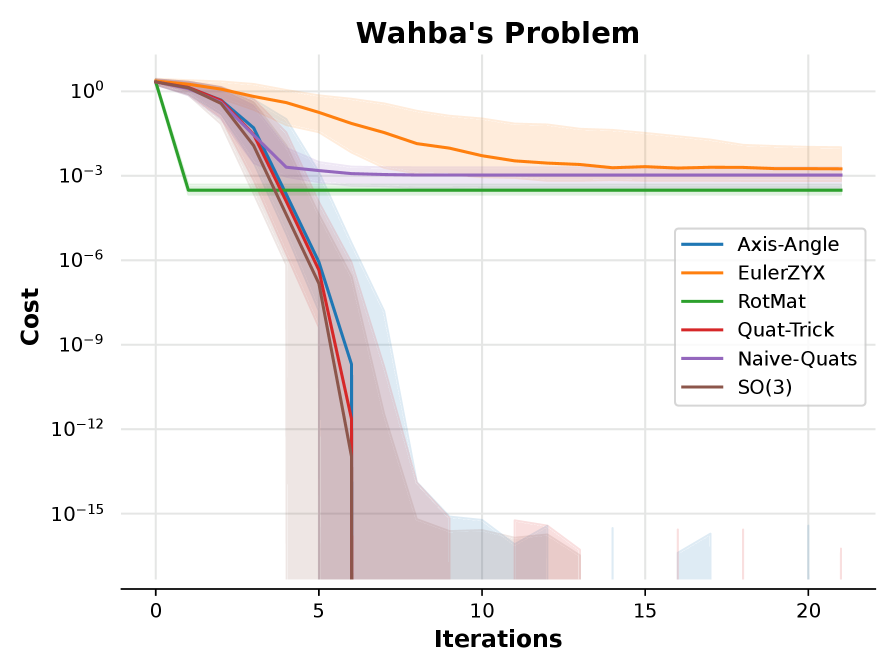
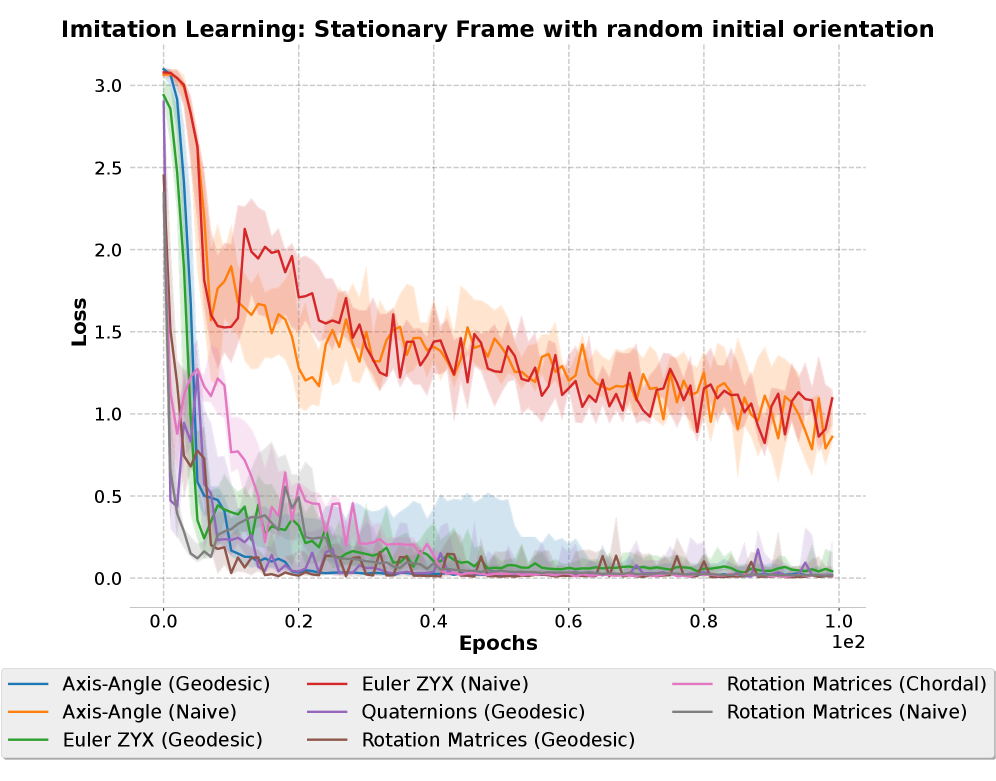
- 通过在直接优化、模仿学习、强化学习和轨迹优化等场景进行实验,提供选择姿态表示的指导。
📝 摘要(中文)
3D姿态有多种表示方法,每种方法都有其局限性和独特之处。为特定任务选择最佳表示通常很困难,并且对于哪种表示更适合一系列任务存在争议。更糟糕的是,当处理需要学习或优化以姿态为输入和/或输出的函数时,可能性(表示、损失函数等)甚至更大,并且很难确定哪种方法最适合每种情况。本文旨在 a) 清晰、简洁地以统一的符号表示所有可用的表示和与 3D 姿态相关的“技巧”(包括李群代数),以及 b) 在代表性场景中对它们进行基准测试。第一部分在机器人文献中是缺失的,因为需要阅读许多不同的教科书和论文才能对所有可能性有一个简洁而清晰的理解,而基准测试对于根据经验证据提出建议是必要的。更准确地说,我们尝试使用以下设置来涵盖机器人技术中最广泛使用的场景:1) 直接优化,2) 使用神经网络控制器的模仿/监督学习,3) 强化学习,以及 4) 使用微分动态规划的轨迹优化。最后,我们根据具体情况提供指导,并提供所有描述的姿态数学的参考实现。
🔬 方法详解
问题定义:在机器人学习和优化任务中,如何选择合适的3D姿态表示是一个关键问题。不同的姿态表示方法(如欧拉角、四元数、旋转矩阵等)各有优缺点,选择不当会影响学习效率和优化效果。现有方法缺乏统一的比较框架和经验指导,难以针对特定任务做出最佳选择。
核心思路:论文的核心思路是构建一个统一的3D姿态表示框架,涵盖各种常见的表示方法和相关技巧(如李群代数)。然后,通过在不同的机器人学习和优化场景中进行基准测试,评估各种表示方法的性能,并根据实验结果提供选择指导。
技术框架:论文的技术框架主要包括两个部分:一是3D姿态表示的统一框架,二是基准测试实验。统一框架包括对各种姿态表示方法的数学描述、转换关系和相关技巧的总结。基准测试实验则在不同的机器人学习和优化场景中,使用不同的姿态表示方法进行实验,并比较它们的性能。这些场景包括直接优化、模仿学习、强化学习和轨迹优化。
关键创新:论文的关键创新在于提供了一个统一的3D姿态表示框架,并进行了全面的基准测试。这使得研究人员可以更方便地比较和选择合适的姿态表示方法,从而提高机器人学习和优化任务的效率和效果。此外,论文还提供了所有姿态数学的参考实现,方便其他研究人员使用。
关键设计:在基准测试实验中,论文选择了具有代表性的机器人学习和优化场景,并针对每个场景设计了合适的实验方案。例如,在模仿学习中,使用神经网络控制器来学习目标姿态;在强化学习中,使用不同的姿态表示方法来训练机器人完成特定任务。此外,论文还仔细选择了合适的性能指标,以便客观地评估各种姿态表示方法的性能。
🖼️ 关键图片

📊 实验亮点
论文在四个代表性场景(直接优化、模仿学习、强化学习、轨迹优化)中进行了广泛的实验,比较了不同姿态表示方法的性能。实验结果表明,不同的姿态表示方法在不同的场景下表现不同,论文根据实验结果提供了选择姿态表示方法的指导。例如,在某些场景下,四元数可能比欧拉角更稳定和高效。
🎯 应用场景
该研究成果可广泛应用于机器人、计算机视觉、游戏开发等领域。例如,在机器人运动规划中,可以选择合适的姿态表示方法来提高规划效率和精度;在增强现实应用中,可以使用该框架来处理复杂的3D姿态估计和跟踪问题。该研究有助于推动相关领域的发展,并为实际应用提供指导。
📄 摘要(原文)
There exist numerous ways of representing 3D orientations. Each representation has both limitations and unique features. Choosing the best representation for one task is often a difficult chore, and there exist conflicting opinions on which representation is better suited for a set of family of tasks. Even worse, when dealing with scenarios where we need to learn or optimize functions with orientations as inputs and/or outputs, the set of possibilities (representations, loss functions, etc.) is even larger and it is not easy to decide what is best for each scenario. In this paper, we attempt to a) present clearly, concisely and with unified notation all available representations, and "tricks" related to 3D orientations (including Lie Group algebra), and b) benchmark them in representative scenarios. The first part feels like it is missing from the robotics literature as one has to read many different textbooks and papers in order have a concise and clear understanding of all possibilities, while the benchmark is necessary in order to come up with recommendations based on empirical evidence. More precisely, we experiment with the following settings that attempt to cover most widely used scenarios in robotics: 1) direct optimization, 2) imitation/supervised learning with a neural network controller, 3) reinforcement learning, and 4) trajectory optimization using differential dynamic programming. We finally provide guidelines depending on the scenario, and make available a reference implementation of all the orientation math described.