FILIC: Dual-Loop Force-Guided Imitation Learning with Impedance Torque Control for Contact-Rich Manipulation Tasks
作者: Haizhou Ge, Yufei Jia, Zheng Li, Yue Li, Zhixing Chen, Ruqi Huang, Guyue Zhou
分类: cs.RO
发布日期: 2025-09-21
🔗 代码/项目: GITHUB
💡 一句话要点
FILIC:基于双环力引导模仿学习与阻抗力矩控制的接触式操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 模仿学习 力控制 阻抗控制 接触式操作 机器人 Transformer 力估计
📋 核心要点
- 现有模仿学习策略在接触式操作中缺乏显式的力感知,难以实现精确的力控制,且依赖昂贵的力/扭矩传感器。
- FILIC框架通过双环结构,将基于Transformer的模仿学习策略与阻抗控制器相结合,实现力引导的柔顺操作。
- FILIC通过力估计器和力反馈框架,在无力/扭矩传感器的情况下,实现了更安全、柔顺和适应性强的接触式操作,性能优于现有方法。
📝 摘要(中文)
接触式操作对于机器人执行需要精确力控制的任务至关重要,例如插入、装配和手内操作。然而,大多数模仿学习(IL)策略仍然以位置为中心,缺乏显式的力感知。此外,为协作机器人手臂添加力/扭矩传感器通常成本高昂,并且需要额外的硬件设计。为了克服这些问题,我们提出了FILIC,一个基于阻抗力矩控制的力引导模仿学习框架。FILIC在一个双环结构中集成了基于Transformer的IL策略和阻抗控制器,从而实现柔顺的、力感知的、力执行的操作。对于没有力/扭矩传感器的机器人,我们引入了一种经济高效的末端执行器力估计器,该估计器使用基于解析雅可比矩阵反演的关节力矩测量,同时使用来自数字孪生的模型预测力矩进行补偿。我们还设计了通过手持触觉和VR可视化实现的互补力反馈框架,以提高演示质量。实验表明,FILIC显著优于仅视觉和基于关节力矩的方法,实现了更安全、更柔顺和更具适应性的接触式操作。我们的代码可在https://github.com/TATP-233/FILIC 找到。
🔬 方法详解
问题定义:论文旨在解决接触式操作中,机器人缺乏精确力控制的问题。现有模仿学习方法主要以位置为中心,忽略了力信息,导致在需要精细力控制的任务中表现不佳。同时,直接在机器人上安装力/扭矩传感器成本高昂,限制了其应用范围。
核心思路:论文的核心思路是结合模仿学习和阻抗控制,构建一个双环控制结构。模仿学习策略负责生成期望的运动轨迹,阻抗控制器负责根据实际力和期望力之间的偏差,调整机器人的运动,从而实现柔顺的力控制。此外,论文还提出了一种基于关节力矩的末端执行器力估计方法,无需额外的力/扭矩传感器。
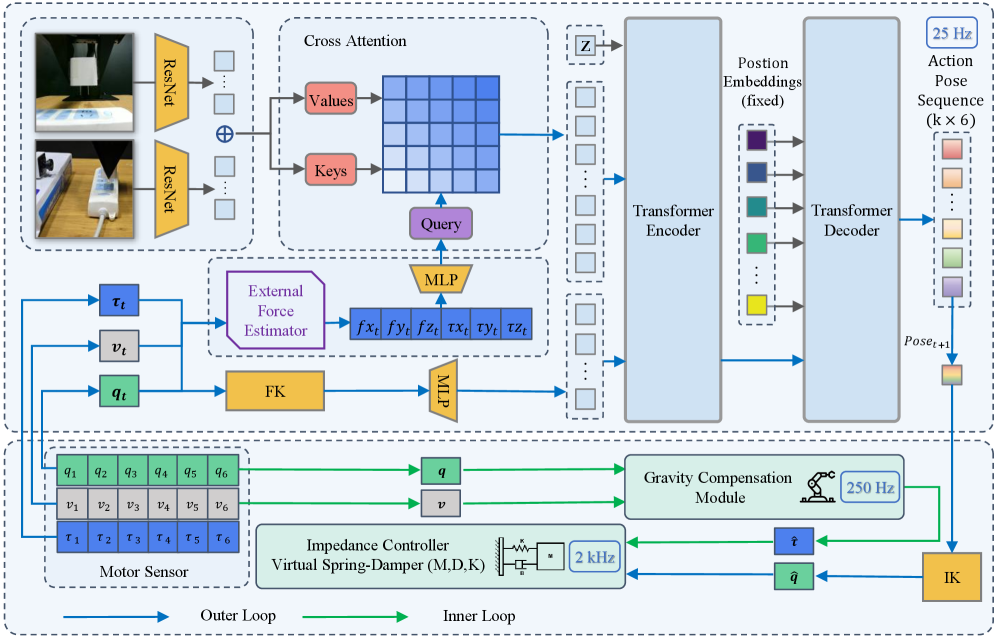
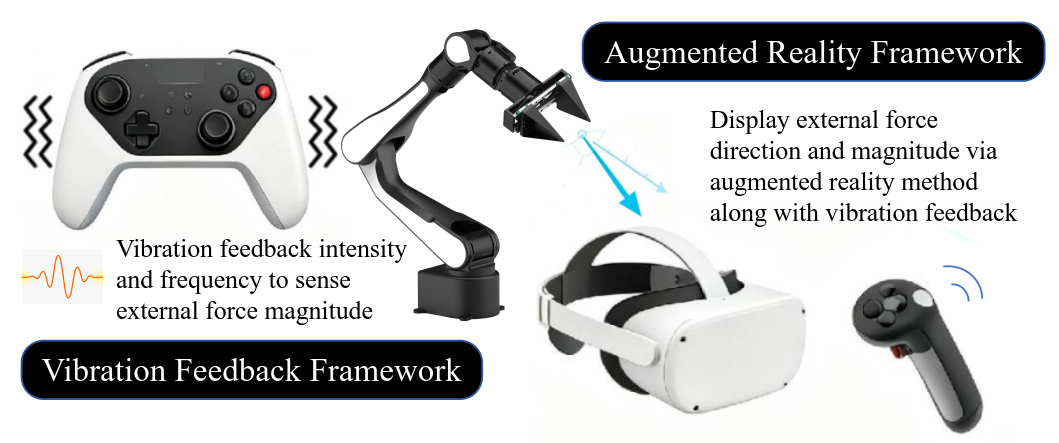
技术框架:FILIC框架包含以下几个主要模块:1) 基于Transformer的模仿学习策略,用于学习专家演示的运动轨迹;2) 阻抗控制器,用于根据力和位置误差调整机器人运动;3) 末端执行器力估计器,利用关节力矩测量估计末端执行器受到的力;4) 力反馈模块,通过手持触觉设备和VR可视化,为操作者提供力反馈,提高演示质量。整体流程是,操作者通过力反馈设备进行演示,模仿学习策略学习演示轨迹,机器人执行任务时,阻抗控制器根据力估计器提供的力信息进行调整。
关键创新:论文的关键创新在于:1) 提出了一个双环力引导模仿学习框架,将模仿学习和阻抗控制相结合,实现了柔顺的力控制;2) 提出了一种基于关节力矩的末端执行器力估计方法,无需额外的力/扭矩传感器;3) 设计了力反馈模块,提高了演示质量。
关键设计:在模仿学习策略中,使用了Transformer网络来学习运动轨迹的时序依赖关系。阻抗控制器的参数需要根据具体的任务进行调整,以实现最佳的性能。力估计器使用了基于解析雅可比矩阵反演的方法,并使用数字孪生模型预测的力矩进行补偿,以提高估计精度。力反馈模块通过手持触觉设备和VR可视化,为操作者提供力觉和视觉反馈。
🖼️ 关键图片
📊 实验亮点
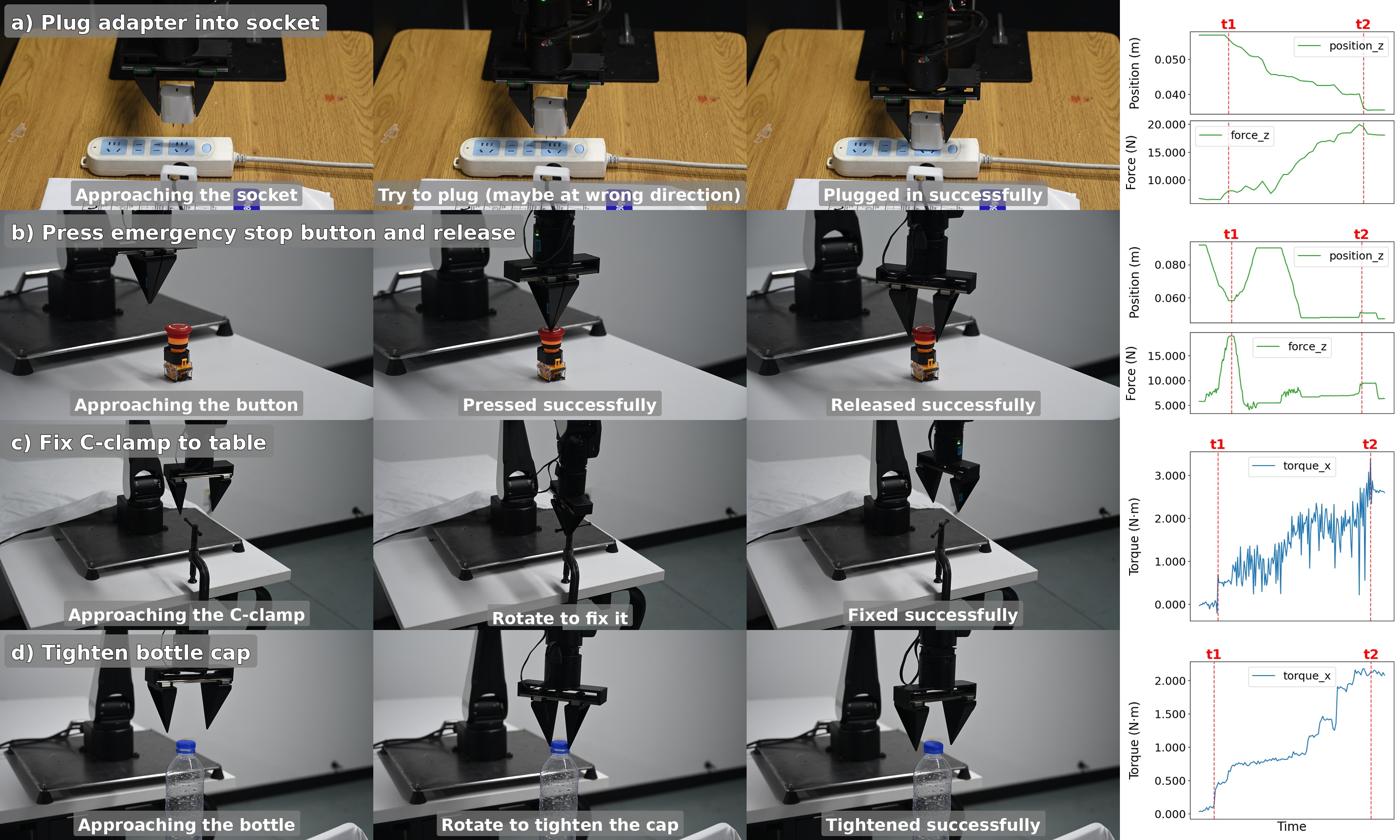
实验结果表明,FILIC框架在接触式操作任务中显著优于仅视觉和基于关节力矩的方法。FILIC能够实现更安全、更柔顺和更具适应性的操作。具体性能数据和提升幅度在论文中详细展示,证明了FILIC框架的有效性。
🎯 应用场景
FILIC框架可应用于各种需要精确力控制的接触式操作任务,例如:精密装配、医疗手术、人机协作等。该研究降低了机器人力控制的成本,提高了机器人的柔顺性和适应性,有望推动机器人在更多领域的应用,并促进人机协作的安全性。
📄 摘要(原文)
Contact-rich manipulation is crucial for robots to perform tasks requiring precise force control, such as insertion, assembly, and in-hand manipulation. However, most imitation learning (IL) policies remain position-centric and lack explicit force awareness, and adding force/torque sensors to collaborative robot arms is often costly and requires additional hardware design. To overcome these issues, we propose FILIC, a Force-guided Imitation Learning framework with impedance torque control. FILIC integrates a Transformer-based IL policy with an impedance controller in a dual-loop structure, enabling compliant force-informed, force-executed manipulation. For robots without force/torque sensors, we introduce a cost-effective end-effector force estimator using joint torque measurements through analytical Jacobian-based inversion while compensating with model-predicted torques from a digital twin. We also design complementary force feedback frameworks via handheld haptics and VR visualization to improve demonstration quality. Experiments show that FILIC significantly outperforms vision-only and joint-torque-based methods, achieving safer, more compliant, and adaptable contact-rich manipulation. Our code can be found in https://github.com/TATP-233/FILIC.