SwarmChat: An LLM-Based, Context-Aware Multimodal Interaction System for Robotic Swarms
作者: Ettilla Mohiuddin Eumi, Hussein Abbass, Nadine Marcus
分类: cs.RO, cs.HC
发布日期: 2025-09-21
备注: This paper has been accepted and presented at the 16th International Conference on Swarm Intelligence (ICSI 2025), held on July 11-15, 2025, in Yokohama, Japan
💡 一句话要点
SwarmChat:基于LLM的上下文感知多模态机器人集群交互系统
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱五:交互与反应 (Interaction & Reaction) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 人机群交互 大型语言模型 多模态交互 上下文感知 机器人集群控制
📋 核心要点
- 现有的人机群交互方法缺乏直观的实时自适应界面,导致决策缓慢和认知负荷过高,限制了命令的灵活性。
- SwarmChat利用大型语言模型,构建上下文感知、多模态交互系统,允许用户通过自然语言和多种模态控制机器人集群。
- 初步评估表明,SwarmChat的LLM模块能够准确解释上下文、识别意图并有效传递命令,从而实现较高的用户满意度。
📝 摘要(中文)
传统的人机群交互(HSI)方法通常缺乏直观的实时自适应界面,导致决策速度变慢,认知负荷增加,并限制了命令的灵活性。为了解决这个问题,我们提出了SwarmChat,一个由大型语言模型(LLM)驱动的上下文感知多模态交互系统。SwarmChat使用户能够使用多种模态(如文本、语音或遥操作)向机器人集群发出自然语言命令。该系统集成了四个基于LLM的模块:上下文生成器、意图识别、任务规划器和模态选择器。这些模块协同工作,从关键词生成上下文,检测用户意图,根据实时机器人状态调整命令,并建议最佳通信模态。其三层架构提供了一个动态界面,具有固定和可定制的命令选项,支持灵活控制,同时优化认知努力。初步评估还表明,SwarmChat的LLM模块提供了准确的上下文解释、相关的意图识别和有效的命令传递,实现了较高的用户满意度。
🔬 方法详解
问题定义:现有的人机群交互系统通常依赖于预定义的命令或复杂的控制界面,用户需要花费大量精力理解和操作,难以适应动态变化的环境。这导致决策速度慢,认知负荷高,并且限制了用户对机器人集群的灵活控制。因此,需要一种更自然、更直观的交互方式,使用户能够轻松地与机器人集群进行通信和协作。
核心思路:SwarmChat的核心思路是利用大型语言模型(LLM)的强大能力,构建一个上下文感知、多模态的交互系统。通过LLM理解用户的自然语言指令,并将其转化为机器人集群可以执行的任务。同时,系统能够根据机器人集群的实时状态和环境信息,动态调整命令和选择最佳的通信模态,从而提高交互效率和用户体验。
技术框架:SwarmChat采用三层架构,包含四个基于LLM的模块。第一层是用户交互层,支持文本、语音和遥操作等多种模态输入。第二层是LLM处理层,包含上下文生成器、意图识别、任务规划器和模态选择器四个模块。上下文生成器从用户输入中提取关键词,生成上下文信息。意图识别模块根据上下文信息识别用户意图。任务规划器根据用户意图和机器人集群状态,生成具体的任务计划。模态选择器根据任务类型和环境条件,选择最佳的通信模态。第三层是机器人集群控制层,负责执行任务计划并向用户反馈状态信息。
关键创新:SwarmChat的关键创新在于将大型语言模型应用于人机群交互领域,实现了上下文感知和多模态的自然语言控制。与传统的基于预定义命令或规则的交互方式相比,SwarmChat能够更好地理解用户意图,并根据实时环境动态调整命令,从而提高了交互的灵活性和效率。此外,SwarmChat的多模态交互界面也为用户提供了更丰富的交互方式选择。
关键设计:上下文生成器使用预训练的语言模型提取关键词,并结合机器人集群的状态信息生成上下文向量。意图识别模块使用分类模型预测用户意图,并根据置信度选择最佳意图。任务规划器使用LLM生成任务计划,并根据机器人集群的约束条件进行优化。模态选择器使用规则引擎或机器学习模型选择最佳的通信模态,例如文本、语音或图形界面。
🖼️ 关键图片


📊 实验亮点
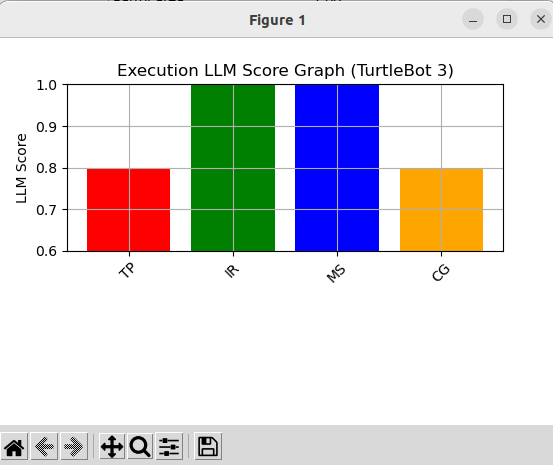
初步评估结果显示,SwarmChat的LLM模块能够提供准确的上下文解释、相关的意图识别和有效的命令传递,实现了较高的用户满意度。用户能够通过自然语言轻松地控制机器人集群,并根据实时反馈调整命令。这些结果表明SwarmChat在人机群交互方面具有显著的优势和潜力。
🎯 应用场景
SwarmChat可应用于多种需要人机群协作的场景,例如搜救行动、环境监测、农业生产和物流配送等。通过自然语言和多模态交互,用户可以更轻松地指挥和控制机器人集群,提高工作效率和安全性。未来,SwarmChat有望成为人机协作的重要工具,推动机器人技术在各个领域的应用。
📄 摘要(原文)
Traditional Human-Swarm Interaction (HSI) methods often lack intuitive real-time adaptive interfaces, making decision making slower and increasing cognitive load while limiting command flexibility. To solve this, we present SwarmChat, a context-aware, multimodal interaction system powered by Large Language Models (LLMs). SwarmChat enables users to issue natural language commands to robotic swarms using multiple modalities, such as text, voice, or teleoperation. The system integrates four LLM-based modules: Context Generator, Intent Recognition, Task Planner, and Modality Selector. These modules collaboratively generate context from keywords, detect user intent, adapt commands based on real-time robot state, and suggest optimal communication modalities. Its three-layer architecture offers a dynamic interface with both fixed and customizable command options, supporting flexible control while optimizing cognitive effort. The preliminary evaluation also shows that the SwarmChat's LLM modules provide accurate context interpretation, relevant intent recognition, and effective command delivery, achieving high user satisfaction.