A Framework for Optimal Ankle Design of Humanoid Robots
作者: Guglielmo Cervettini, Roberto Mauceri, Alex Coppola, Fabio Bergonti, Luca Fiorio, Marco Maggiali, Daniele Pucci
分类: cs.RO
发布日期: 2025-09-19
备注: This paper has been accepted for publication at the 2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids), Seoul, 2025
💡 一句话要点
提出人形机器人踝关节优化设计框架,提升地面交互性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 踝关节设计 并联机构 多目标优化 运动学 机械顺应性 地面交互
📋 核心要点
- 现有的人形机器人踝关节设计缺乏系统性的优化方法,难以兼顾机械性能和电机质量分布。
- 本文提出一种统一的并联踝关节机构设计与评估方法,通过多目标优化综合考虑机构几何形状。
- 实验结果表明,优化后的RSU踝关节设计显著优于原始串行设计和传统RSU设计,成本函数降低显著。
📝 摘要(中文)
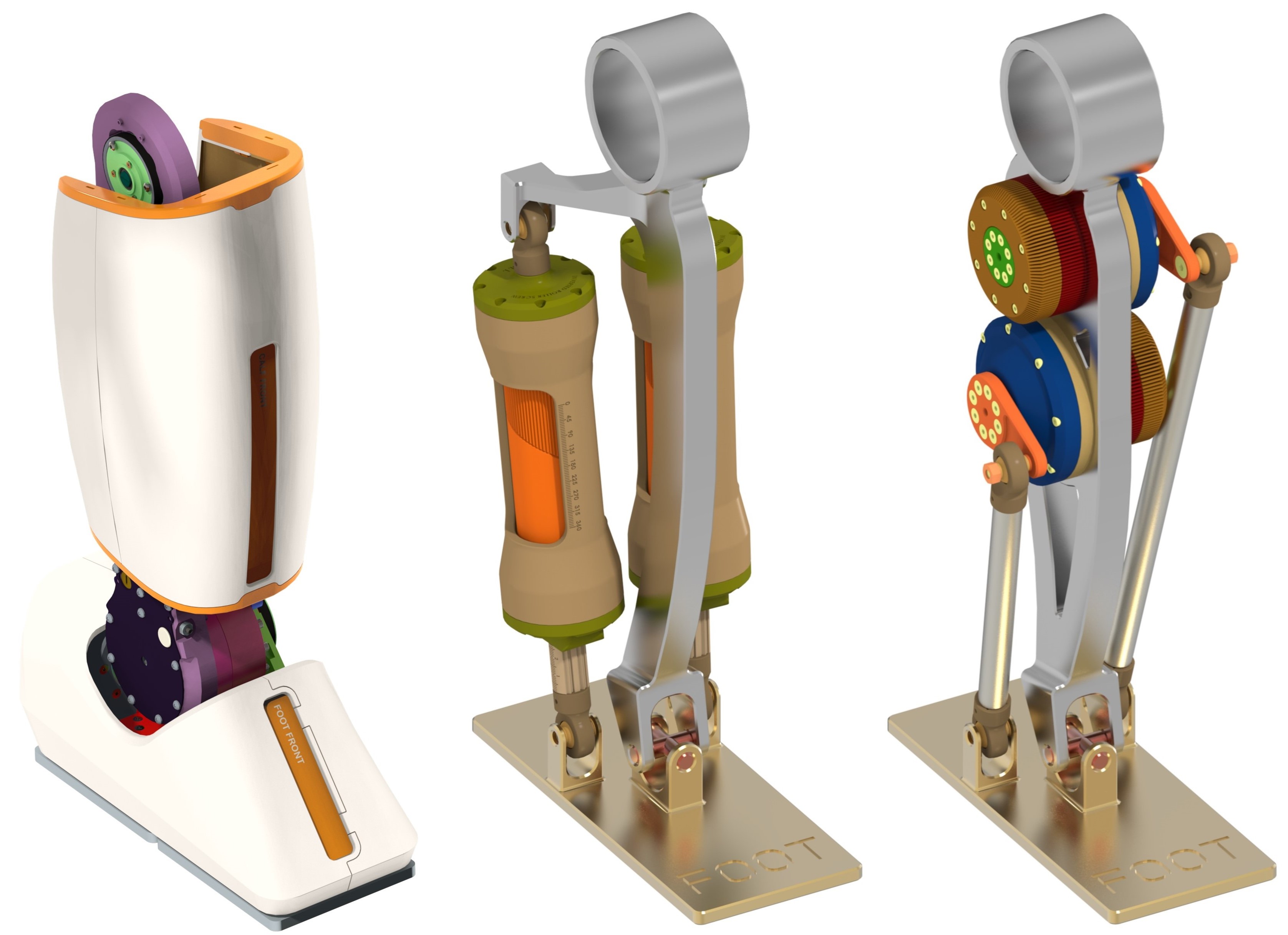
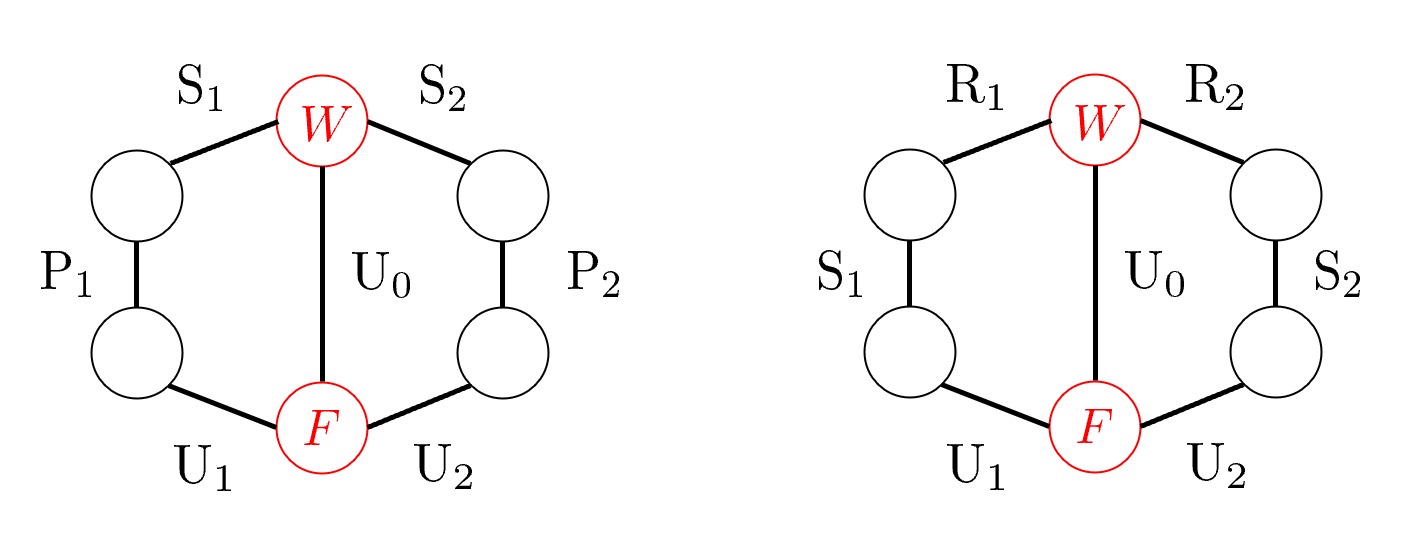
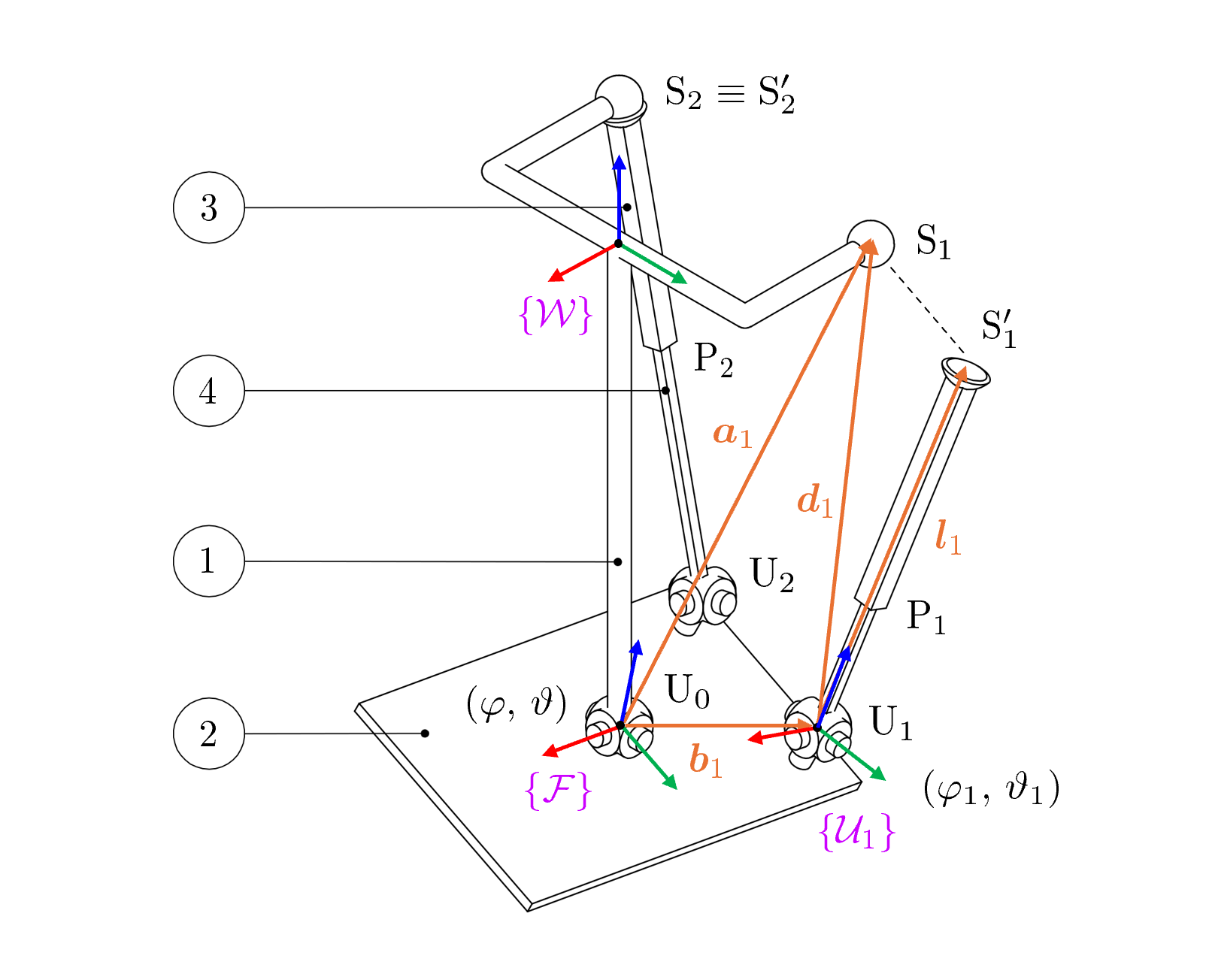
人形机器人踝关节的设计对于安全高效的地面交互至关重要。机械顺应性和电机质量分布等关键因素推动了并联机构架构的应用。然而,选择最优配置取决于执行器的可用性和任务需求。本文提出了一种统一的方法来设计和评估并联踝关节机构。通过多目标优化综合机构几何形状,并使用标量成本函数评估结果方案,该函数聚合了关键性能指标以进行跨架构比较。我们重点关注两种具有代表性的架构:球-棱柱-万向 (SPU) 和旋转-球-万向 (RSU)。对于两者,我们都解决了运动学问题,并且对于 RSU,引入了一种参数化,以确保工作空间的可行性并加速优化。我们通过重新设计现有的人形机器人踝关节来验证我们的方法。优化后的 RSU 始终优于原始串行设计和传统设计的 RSU,分别降低了高达 41% 和 14% 的成本函数。
🔬 方法详解
问题定义:人形机器人踝关节设计需要兼顾机械顺应性、电机质量分布、工作空间和运动性能等多个目标。现有方法通常依赖于经验或启发式设计,缺乏系统性的优化框架,难以找到全局最优解。此外,不同类型的并联机构架构(如SPU和RSU)的性能差异也缺乏量化评估和比较。
核心思路:本文的核心思路是将踝关节设计问题转化为一个多目标优化问题,通过优化机构的几何参数,使得设计满足多个性能指标的要求。为了实现跨架构的比较,论文定义了一个标量成本函数,用于综合评估不同设计的优劣。此外,针对RSU机构,论文提出了一种参数化方法,以确保工作空间的可行性并加速优化过程。
技术框架:该框架包含以下几个主要步骤:1) 机构建模:对SPU和RSU两种并联机构进行运动学建模。2) 多目标优化:使用优化算法(具体算法未知)搜索机构的几何参数,目标是最小化成本函数。3) 性能评估:使用标量成本函数评估优化后的机构性能,该函数综合考虑了多个关键性能指标。4) 架构比较:比较不同架构(SPU和RSU)的性能,选择最优的架构。
关键创新:该论文的关键创新在于:1) 提出了一个统一的并联踝关节机构设计与评估框架,可以系统地优化机构的几何参数并进行跨架构比较。2) 针对RSU机构,提出了一种参数化方法,以确保工作空间的可行性并加速优化过程。3) 定义了一个标量成本函数,用于综合评估机构的多个性能指标。
关键设计:论文的关键设计包括:1) 成本函数的定义:成本函数需要综合考虑多个性能指标,例如机械顺应性、电机质量分布、工作空间和运动性能等。具体指标的权重设置未知。2) RSU机构的参数化方法:该方法需要确保优化后的机构具有可行的工作空间,并能够加速优化过程。具体的参数化方法未知。3) 优化算法的选择:需要选择合适的优化算法来搜索机构的几何参数,以最小化成本函数。具体算法未知。
🖼️ 关键图片
📊 实验亮点
实验结果表明,优化后的RSU踝关节设计显著优于原始串行设计和传统设计的RSU踝关节。与原始串行设计相比,成本函数降低了高达41%。与传统设计的RSU踝关节相比,成本函数降低了14%。这些结果验证了该优化框架的有效性,并表明优化后的并联踝关节设计能够显著提升人形机器人的性能。
🎯 应用场景
该研究成果可应用于人形机器人的踝关节设计,提升机器人的运动性能、稳定性和地面交互能力。优化后的踝关节设计可以提高机器人在复杂地形上的适应性,使其能够执行更复杂的任务,例如搜救、巡检和辅助医疗等。此外,该方法也可推广到其他并联机构的设计与优化。
📄 摘要(原文)
The design of the humanoid ankle is critical for safe and efficient ground interaction. Key factors such as mechanical compliance and motor mass distribution have driven the adoption of parallel mechanism architectures. However, selecting the optimal configuration depends on both actuator availability and task requirements. We propose a unified methodology for the design and evaluation of parallel ankle mechanisms. A multi-objective optimization synthesizes the mechanism geometry, the resulting solutions are evaluated using a scalar cost function that aggregates key performance metrics for cross-architecture comparison. We focus on two representative architectures: the Spherical-Prismatic-Universal (SPU) and the Revolute-Spherical-Universal (RSU). For both, we resolve the kinematics, and for the RSU, introduce a parameterization that ensures workspace feasibility and accelerates optimization. We validate our approach by redesigning the ankle of an existing humanoid robot. The optimized RSU consistently outperforms both the original serial design and a conventionally engineered RSU, reducing the cost function by up to 41% and 14%, respectively.