Dual-Arm Hierarchical Planning for Laboratory Automation: Vibratory Sieve Shaker Operations
作者: Haoran Xiao, Xue Wang, Huimin Lu, Zhiwen Zeng, Zirui Guo, Ziqi Ni, Yicong Ye, Wei Dai
分类: cs.RO
发布日期: 2025-09-18
💡 一句话要点
提出双臂机器人分层规划框架,实现振动筛分机操作自动化
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 双臂机器人 分层规划 路径规划 轨迹优化 实验室自动化
📋 核心要点
- 现有方法在狭窄空间采样效率低、轨迹易溢出、路径规划不佳,难以实现振动筛分机操作自动化。
- 提出分层规划框架,结合先验引导路径规划和多步轨迹优化,提升采样效率和轨迹平滑性。
- 实验结果表明,规划时间减少高达80.4%,路径点减少89.4%,验证了框架的有效性和实用性。
📝 摘要(中文)
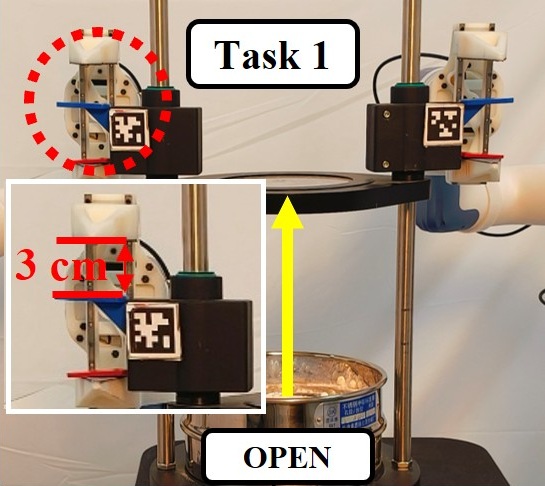
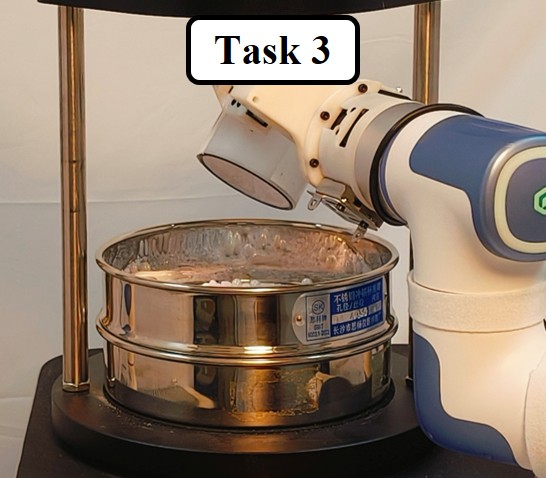
本文旨在解决材料实验室中振动筛分机操作自动化的挑战,重点关注三个关键任务:1) 3厘米狭窄空间内的双臂盖子操作;2) 重叠工作空间中的双手传递;3) 具有方向约束的受阻粉末样品容器的递送。这些任务带来了重大挑战,包括狭窄通道中低效的采样、防止溢出的平滑轨迹需求以及传统方法生成的不理想路径。为了克服这些挑战,我们提出了一种分层规划框架,该框架结合了先验引导的路径规划和多步轨迹优化。前者使用有限高斯混合模型来提高狭窄通道中的采样效率,而后者通过缩短、简化、施加关节约束和B样条平滑来优化路径。实验结果表明了该框架的有效性:规划时间最多减少80.4%,路径点减少89.4%。此外,该系统在物理实验中完成了完整的振动筛分机操作流程,验证了其在复杂实验室自动化中的实际适用性。
🔬 方法详解
问题定义:论文旨在解决材料实验室中振动筛分机操作的自动化问题。现有方法在处理狭窄空间内的双臂操作、重叠工作空间中的物体传递以及带有方向约束的物体递送时存在采样效率低、轨迹不平滑、规划路径不佳等问题,导致自动化效率低下甚至失败。
核心思路:论文的核心思路是采用分层规划框架,将路径规划和轨迹优化解耦。首先,利用先验引导的路径规划快速生成粗略但可行的路径;然后,通过多步轨迹优化对路径进行精细调整,保证轨迹的平滑性、安全性以及满足各种约束条件。这种分层结构能够有效降低规划复杂度,提高规划效率。
技术框架:该分层规划框架主要包含两个阶段:先验引导的路径规划和多步轨迹优化。在路径规划阶段,使用有限高斯混合模型(Finite Gaussian Mixture Model, FGMM)对狭窄通道进行建模,引导采样过程,提高在狭窄区域的采样效率。在轨迹优化阶段,通过一系列优化步骤,包括路径缩短、路径简化、关节约束施加和B样条平滑,逐步优化路径,最终生成满足要求的平滑轨迹。
关键创新:该论文的关键创新在于将先验知识引入路径规划过程,并结合多步轨迹优化,从而显著提高了复杂环境下的双臂机器人操作规划效率。传统的路径规划方法在狭窄空间内采样效率较低,而该方法通过FGMM建模,有效引导采样,避免了无效采样,提高了规划速度。此外,多步轨迹优化保证了轨迹的平滑性和安全性。
关键设计:在先验引导的路径规划中,FGMM的参数(如高斯分量的数量、均值和方差)需要根据实际环境进行调整。在多步轨迹优化中,需要仔细设计各个优化步骤的权重,以平衡路径长度、平滑性和关节约束等因素。B样条平滑的控制点数量和阶数也会影响轨迹的平滑程度和计算复杂度。
🖼️ 关键图片

📊 实验亮点
实验结果表明,所提出的分层规划框架能够显著提高规划效率和轨迹质量。与传统方法相比,规划时间最多减少80.4%,路径点减少89.4%。此外,该系统成功完成了完整的振动筛分机操作流程,验证了其在实际应用中的可行性。这些结果表明,该方法在复杂实验室自动化任务中具有显著优势。
🎯 应用场景
该研究成果可应用于各种实验室自动化场景,例如化学合成、生物实验、材料制备等。通过自动化重复性高、危险性高的实验操作,可以提高实验效率、降低人为误差、保障实验人员安全。此外,该方法也可推广到其他需要双臂协同操作的工业自动化领域,例如装配、搬运等。
📄 摘要(原文)
This paper addresses the challenges of automating vibratory sieve shaker operations in a materials laboratory, focusing on three critical tasks: 1) dual-arm lid manipulation in 3 cm clearance spaces, 2) bimanual handover in overlapping workspaces, and 3) obstructed powder sample container delivery with orientation constraints. These tasks present significant challenges, including inefficient sampling in narrow passages, the need for smooth trajectories to prevent spillage, and suboptimal paths generated by conventional methods. To overcome these challenges, we propose a hierarchical planning framework combining Prior-Guided Path Planning and Multi-Step Trajectory Optimization. The former uses a finite Gaussian mixture model to improve sampling efficiency in narrow passages, while the latter refines paths by shortening, simplifying, imposing joint constraints, and B-spline smoothing. Experimental results demonstrate the framework's effectiveness: planning time is reduced by up to 80.4%, and waypoints are decreased by 89.4%. Furthermore, the system completes the full vibratory sieve shaker operation workflow in a physical experiment, validating its practical applicability for complex laboratory automation.