Multi-Quadruped Cooperative Object Transport: Learning Decentralized Pinch-Lift-Move
作者: Bikram Pandit, Aayam Kumar Shrestha, Alan Fern
分类: cs.RO
发布日期: 2025-09-17 (更新: 2025-09-19)
💡 一句话要点
提出一种分散式策略,实现多足机器人协同搬运无抓取物体
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 多足机器人 协同搬运 分散式控制 强化学习 无抓取物体
📋 核心要点
- 现有方法依赖刚性连接或集中控制,限制了多足机器人协同搬运的灵活性和可扩展性,本文旨在解决这一问题。
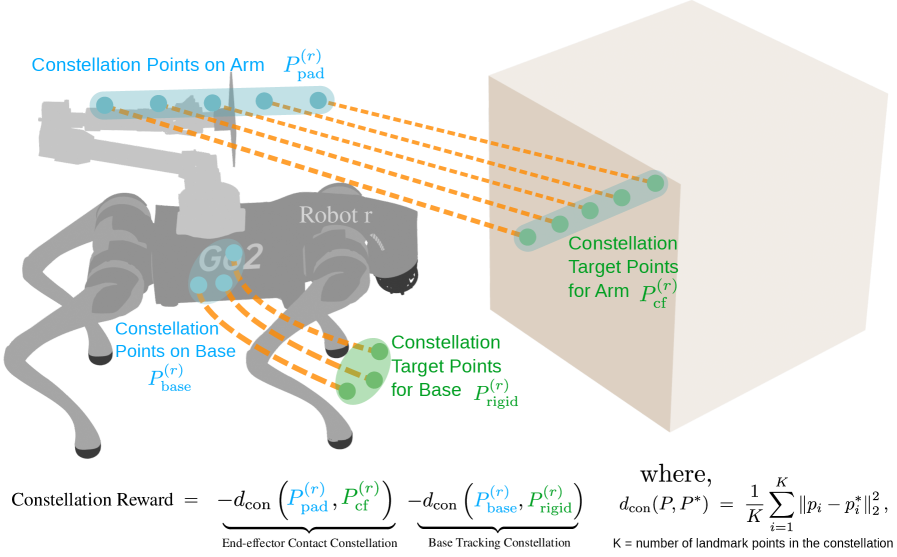
- 论文提出一种分层策略架构和星座奖励函数,鼓励机器人通过接触力进行协调,模拟刚性连接,实现分散式控制。
- 实验证明该方法在不同物体和机器人数量下具有鲁棒性,并成功进行了从仿真到真实的迁移,验证了其有效性。
📝 摘要(中文)
本文研究了使用N个带手臂的四足机器人团队进行分散式协同运输,这些机器人必须仅通过物理接触来夹取、抬起和移动无法抓取的物体。与依赖机器人和物体之间刚性机械耦合的先前工作不同,我们解决了更具挑战性的设置,即机械独立的机器人必须仅通过接触力进行协调,而无需任何通信或集中控制。为此,我们采用了一种分层策略架构,将基座运动与手臂控制分开,并提出了一种星座奖励公式,该公式统一了位置和方向跟踪,以强制执行刚性接触行为。关键的见解是鼓励机器人通过仔细的奖励设计和训练课程表现得好像与物体刚性连接,而不是显式的机械约束。我们的方法通过共享策略参数和隐式同步提示来实现协调——无需重新训练即可扩展到任意团队规模。我们展示了广泛的仿真实验,以证明在不同的物体几何形状和质量上,2-10个机器人的鲁棒运输,以及轻量级物体的sim2real迁移结果。
🔬 方法详解
问题定义:现有方法在多足机器人协同搬运无抓取物体时,通常依赖于机器人与物体之间的刚性机械连接或集中式控制。这些方法限制了系统的灵活性和可扩展性,难以应对复杂环境和大规模机器人团队。因此,需要一种分散式控制方法,使机器人仅通过接触力即可协同搬运物体,无需显式通信或集中协调。
核心思路:论文的核心思路是通过奖励函数的设计,使机器人学习到一种“虚拟刚性连接”的行为模式。即,虽然机器人之间没有物理连接,但通过优化奖励函数,使它们在运动过程中保持相对稳定的位置和姿态关系,从而实现协同搬运。这种方法避免了显式的机械约束和通信需求,提高了系统的鲁棒性和可扩展性。
技术框架:该方法采用分层策略架构,将机器人的控制分为基座运动控制和手臂控制两个层次。基座运动控制负责机器人的整体移动,手臂控制负责调整机器人与物体之间的接触力。两个层次的控制策略通过共享策略参数进行训练,从而实现协同运动。此外,论文还提出了一个星座奖励函数,用于统一位置和方向跟踪,鼓励机器人保持与物体之间的刚性接触行为。
关键创新:该方法最重要的创新在于其分散式控制策略和星座奖励函数的设计。分散式控制策略避免了集中式控制的单点故障问题,提高了系统的鲁棒性。星座奖励函数通过鼓励机器人保持与物体之间的刚性接触行为,实现了无需显式机械约束的协同搬运。
关键设计:星座奖励函数是该方法中的一个关键设计。它将位置和方向跟踪误差统一到一个奖励函数中,鼓励机器人保持与物体之间的相对位置和姿态。具体而言,该奖励函数包括位置误差项、方向误差项和接触力误差项。通过调整这些误差项的权重,可以控制机器人与物体之间的接触力大小和稳定性。此外,论文还采用了一种课程学习策略,逐步增加训练难度,从而提高机器人的学习效率和泛化能力。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法能够实现2-10个机器人在不同物体几何形状和质量下的鲁棒运输。在仿真环境中,该方法能够成功搬运各种形状和质量的物体。此外,该方法还成功进行了从仿真到真实的迁移,验证了其在实际应用中的可行性。具体来说,该方法在轻量级物体的搬运任务中取得了良好的效果。
🎯 应用场景
该研究成果可应用于物流、仓储、建筑等领域,实现多机器人协同搬运重物或异形物体。例如,在仓库中,多个机器人可以协同搬运大型货物,提高搬运效率和安全性。在建筑工地,多个机器人可以协同安装大型构件,降低人工成本和安全风险。此外,该技术还可应用于灾难救援等场景,实现多机器人协同清理障碍物或搬运救援物资。
📄 摘要(原文)
We study decentralized cooperative transport using teams of N-quadruped robots with arm that must pinch, lift, and move ungraspable objects through physical contact alone. Unlike prior work that relies on rigid mechanical coupling between robots and objects, we address the more challenging setting where mechanically independent robots must coordinate through contact forces alone without any communication or centralized control. To this end, we employ a hierarchical policy architecture that separates base locomotion from arm control, and propose a constellation reward formulation that unifies position and orientation tracking to enforce rigid contact behavior. The key insight is encouraging robots to behave as if rigidly connected to the object through careful reward design and training curriculum rather than explicit mechanical constraints. Our approach enables coordination through shared policy parameters and implicit synchronization cues - scaling to arbitrary team sizes without retraining. We show extensive simulation experiments to demonstrate robust transport across 2-10 robots on diverse object geometries and masses, along with sim2real transfer results on lightweight objects.