Language Conditioning Improves Accuracy of Aircraft Goal Prediction in Untowered Airspace
作者: Sundhar Vinodh Sangeetha, Chih-Yuan Chiu, Sarah H. Q. Li, Shreyas Kousik
分类: cs.RO
发布日期: 2025-09-17
备注: The last two authors advised equally. Submitted to the 2026 IEEE International Conference on Robotics and Automation. 8 pages, 6 figures
💡 一句话要点
提出语言条件约束的飞机目标预测框架,提升非塔台空域自主飞行安全性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 飞机目标预测 自然语言理解 多模态融合 非塔台空域 自主飞行 语音识别 时间卷积网络
📋 核心要点
- 非塔台空域依赖语音通信协调,自主飞行器需预测其他飞机的意图和目标位置,现有方法精度不足。
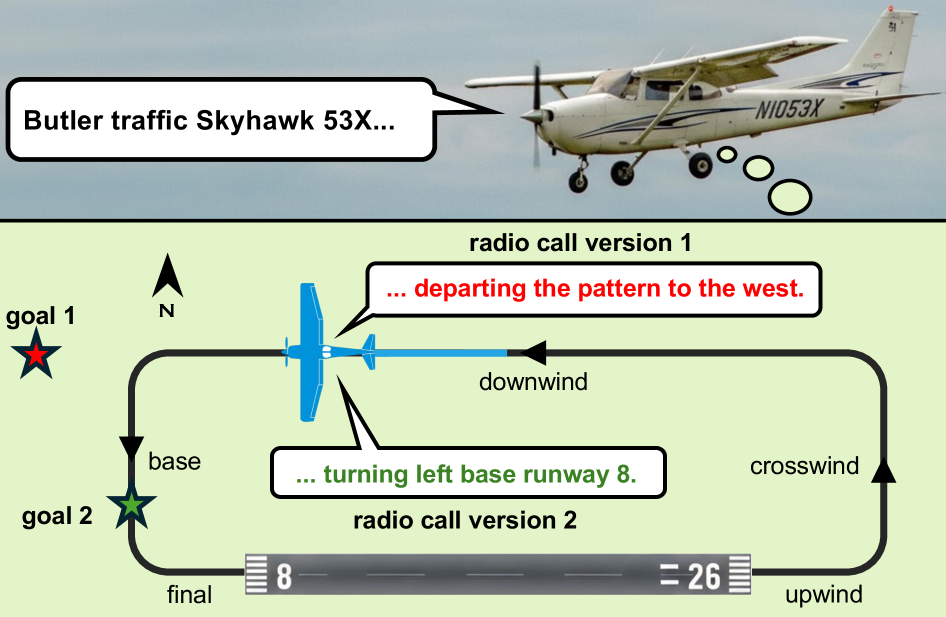
- 论文提出融合自然语言理解与空间推理的多模态框架,利用语音识别和语言模型提取意图标签。
- 实验表明,该方法显著降低了目标预测误差,验证了语言条件约束预测的有效性,并具有实际应用潜力。
📝 摘要(中文)
本文提出了一种多模态飞机目标预测框架,旨在提升非塔台空域中自主飞行的安全性。该框架融合了自然语言理解与空间推理,以改善自主决策。具体而言,利用自动语音识别和大型语言模型转录并理解飞行员无线电通话,识别飞机并提取离散的意图标签。这些意图标签与观测到的轨迹融合,用于调节时间卷积网络和高斯混合模型,从而进行概率性的目标预测。实验结果表明,与仅依赖运动历史的基线方法相比,该方法显著降低了目标预测误差,证明了语言条件约束预测能够提高预测精度。在非塔台机场的真实数据集上的实验验证了该方法,并突出了其在实现具有社会感知能力的、语言条件约束的机器人运动规划方面的潜力。
🔬 方法详解
问题定义:在非塔台空域中,自主飞行器需要准确预测其他飞机的目标位置,以便安全地进行导航和避让。现有的方法主要依赖于飞机的运动轨迹历史进行预测,忽略了飞行员之间的语音通信中包含的丰富意图信息。这种忽略导致预测精度不高,无法满足安全飞行的需求。
核心思路:论文的核心思路是将飞行员的语音通信内容融入到目标预测模型中,利用自然语言理解技术提取语音中的意图信息,并将这些信息作为条件来约束目标预测过程。通过融合语言信息和运动信息,可以更准确地推断出飞机的真实意图和目标位置。
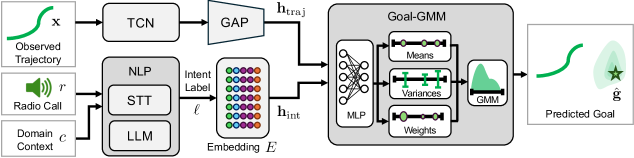
技术框架:该框架主要包含以下几个模块:1) 自动语音识别(ASR)模块,用于将飞行员的语音通信转录为文本;2) 自然语言理解(NLU)模块,利用大型语言模型(LLM)从文本中提取意图标签,例如“起飞”、“降落”等;3) 轨迹预测模块,使用时间卷积网络(TCN)和高斯混合模型(GMM)对飞机的运动轨迹进行建模,并预测未来的轨迹;4) 融合模块,将意图标签和运动轨迹信息融合在一起,作为TCN和GMM的输入,从而实现语言条件约束的目标预测。
关键创新:该论文最重要的创新点在于将自然语言理解技术引入到飞机目标预测问题中,并提出了一种有效的语言条件约束预测方法。与传统的仅依赖运动信息的方法相比,该方法能够利用语音通信中包含的意图信息,从而显著提高目标预测的精度。
关键设计:在NLU模块中,使用了预训练的大型语言模型,并针对飞行员语音通信的特点进行了微调,以提高意图识别的准确率。在轨迹预测模块中,使用了时间卷积网络(TCN)来捕捉轨迹中的时序依赖关系,并使用高斯混合模型(GMM)来建模轨迹的不确定性。在融合模块中,将意图标签作为TCN和GMM的条件输入,从而实现语言条件约束的预测。
🖼️ 关键图片
📊 实验亮点
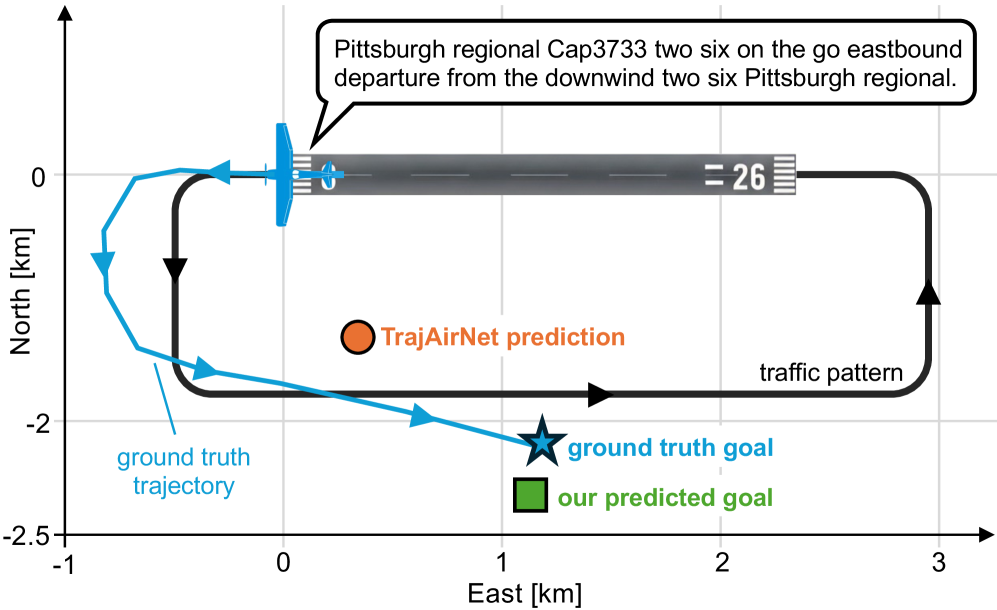
实验结果表明,与仅依赖运动历史的基线方法相比,该方法显著降低了目标预测误差。具体而言,语言条件约束的预测方法在目标预测精度上取得了显著提升,验证了该方法的有效性。在真实数据集上的实验结果进一步证明了该方法在实际应用中的潜力。
🎯 应用场景
该研究成果可应用于开发更安全、更智能的自主飞行系统,尤其是在非塔台空域等复杂环境中。通过融合语音通信信息,自主飞行器能够更好地理解其他飞机的意图,从而做出更合理的决策,避免潜在的冲突。此外,该技术还可应用于空中交通管理、无人机集群控制等领域,具有广阔的应用前景。
📄 摘要(原文)
Autonomous aircraft must safely operate in untowered airspace, where coordination relies on voice-based communication among human pilots. Safe operation requires an aircraft to predict the intent, and corresponding goal location, of other aircraft. This paper introduces a multimodal framework for aircraft goal prediction that integrates natural language understanding with spatial reasoning to improve autonomous decision-making in such environments. We leverage automatic speech recognition and large language models to transcribe and interpret pilot radio calls, identify aircraft, and extract discrete intent labels. These intent labels are fused with observed trajectories to condition a temporal convolutional network and Gaussian mixture model for probabilistic goal prediction. Our method significantly reduces goal prediction error compared to baselines that rely solely on motion history, demonstrating that language-conditioned prediction increases prediction accuracy. Experiments on a real-world dataset from an untowered airport validate the approach and highlight its potential to enable socially aware, language-conditioned robotic motion planning.