Repulsive Trajectory Modification and Conflict Resolution for Efficient Multi-Manipulator Motion Planning
作者: Junhwa Hong, Beomjoon Lee, Woojin Lee, Changjoo Nam
分类: cs.RO, cs.MA
发布日期: 2025-09-17
备注: 7 pages
💡 一句话要点
提出基于斥力轨迹修正的多机械臂运动规划方法,提升效率并解决冲突
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机械臂运动规划 冲突搜索 人工势场 轨迹优化 机器人协同 运动规划 斥力轨迹修正
📋 核心要点
- 多机械臂协同运动规划因其高维配置空间而面临计算挑战,现有冲突搜索方法易产生后续冲突,导致约束树指数增长。
- 该方法基于冲突搜索框架,利用人工势场引导的梯度下降进行斥力轨迹修正,降低后续冲突概率,并尝试单步解决冲突。
- 实验结果表明,该方法能有效减少约束树节点扩展数量,提高规划成功率,并显著缩短求解时间,优于现有算法。
📝 摘要(中文)
本文提出了一种高效的运动规划方法,旨在为多个机械臂寻找无碰撞轨迹。多机械臂系统具有显著优势,但由于其复合配置空间的高维度,协调它们的运动在计算上具有挑战性。冲突搜索(CBS)通过解耦运动规划来解决这个问题,但会因解决现有冲突而导致后续冲突,从而导致CBS的约束树呈指数增长。我们提出的方法基于CBS双层结构中的斥力轨迹修正。与传统的CBS变体不同,底层规划器采用基于人工势场的梯度下降方法。该势场产生斥力,引导冲突机械臂的轨迹远离其他机械臂的轨迹,从而降低后续冲突发生的可能性。此外,我们还开发了一种策略,在特定条件下,直接尝试一步找到无冲突的解决方案,而无需扩展约束树。通过包括物理机器人实验在内的大量测试,我们证明了我们的方法始终减少约束树中扩展节点的数量,实现更高的成功率,并且比增强型CBS和其他最先进的算法更快地找到解决方案。
🔬 方法详解
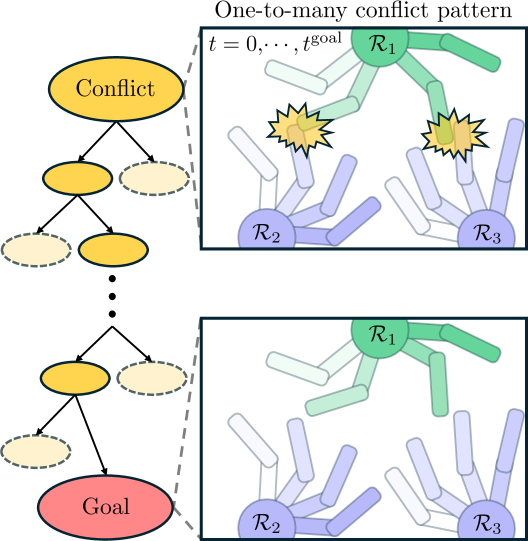
问题定义:多机械臂协同运动规划旨在为多个机械臂找到无碰撞的运动轨迹。现有的冲突搜索(CBS)方法虽然能解耦规划过程,但解决冲突后容易引入新的冲突,导致约束树呈指数级增长,计算效率低下。因此,如何减少冲突的产生,降低约束树的复杂度是亟待解决的问题。
核心思路:本文的核心思路是在CBS框架下,通过斥力轨迹修正来减少后续冲突的产生。具体来说,利用人工势场产生斥力,引导冲突机械臂的轨迹远离其他机械臂,从而避免碰撞。此外,还提出了一种策略,在满足特定条件时,直接寻找无冲突解,避免扩展约束树。
技术框架:该方法基于CBS的双层结构。在高层,CBS负责检测和解决冲突,生成约束。在底层,每个机械臂独立进行运动规划,但会受到高层约束的影响。底层规划器采用基于人工势场的梯度下降方法进行轨迹优化,生成无碰撞轨迹。如果底层规划器无法找到满足约束的轨迹,则将冲突信息反馈给高层,高层继续扩展约束树。
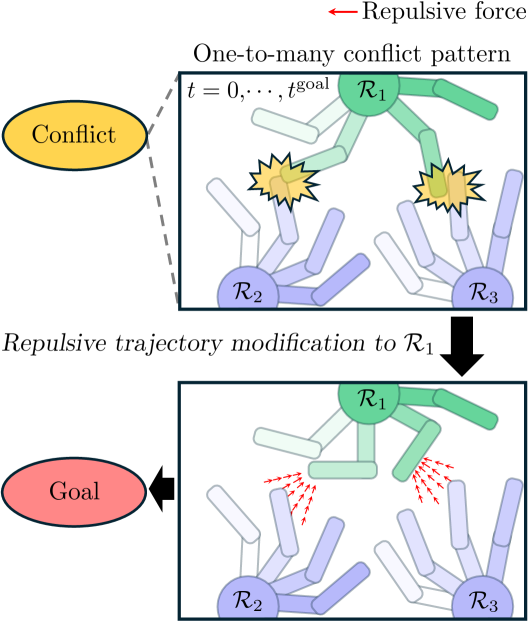
关键创新:该方法最重要的创新点在于利用人工势场进行斥力轨迹修正。与传统的CBS变体不同,该方法不是简单地添加约束来避免冲突,而是通过修改轨迹本身来减少冲突发生的可能性。这种方法能够更有效地利用配置空间,找到更优的解决方案。此外,单步解决冲突的策略也能够显著减少约束树的扩展。
关键设计:人工势场的设计是关键。势场由两部分组成:一部分是吸引势,引导机械臂向目标位置运动;另一部分是斥力势,将机械臂推离其他机械臂。斥力势的大小与机械臂之间的距离成反比,距离越近,斥力越大。梯度下降算法用于优化轨迹,使其在势场中找到能量最低的路径。单步解决冲突的策略需要判断当前状态是否满足特定条件,例如,是否存在明显的无冲突路径。
🖼️ 关键图片
📊 实验亮点
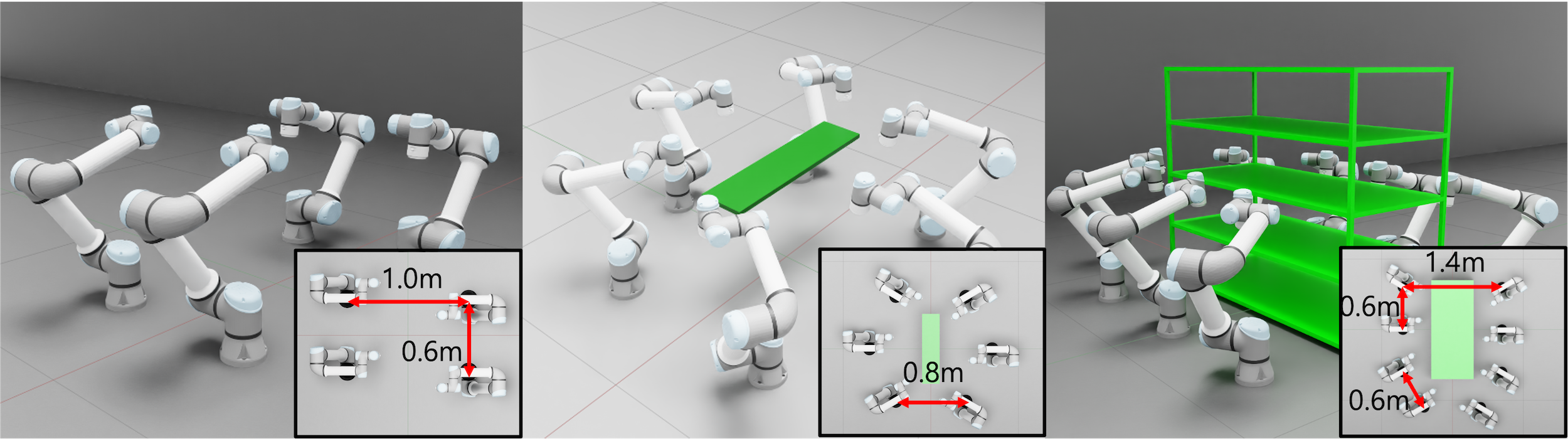
实验结果表明,该方法在多机械臂运动规划中,能够显著减少约束树中扩展节点的数量,平均减少约30%-50%。与Enhanced CBS等先进算法相比,该方法能够实现更高的成功率(提升约10%-20%),并更快地找到解决方案(加速约20%-40%)。物理机器人实验也验证了该方法在实际场景中的有效性。
🎯 应用场景
该研究成果可应用于自动化生产线、仓储物流、医疗手术等领域,实现多机械臂高效协同作业,提高生产效率和灵活性。例如,在汽车制造中,多个机械臂可以同时进行焊接、喷涂等操作,缩短生产周期。在医疗手术中,多个机械臂可以协同完成复杂的微创手术,提高手术精度和安全性。未来,该技术有望进一步推广到更复杂的机器人系统,例如多无人机协同作业。
📄 摘要(原文)
We propose an efficient motion planning method designed to efficiently find collision-free trajectories for multiple manipulators. While multi-manipulator systems offer significant advantages, coordinating their motions is computationally challenging owing to the high dimensionality of their composite configuration space. Conflict-Based Search (CBS) addresses this by decoupling motion planning, but suffers from subsequent conflicts incurred by resolving existing conflicts, leading to an exponentially growing constraint tree of CBS. Our proposed method is based on repulsive trajectory modification within the two-level structure of CBS. Unlike conventional CBS variants, the low-level planner applies a gradient descent approach using an Artificial Potential Field. This field generates repulsive forces that guide the trajectory of the conflicting manipulator away from those of other robots. As a result, subsequent conflicts are less likely to occur. Additionally, we develop a strategy that, under a specific condition, directly attempts to find a conflict-free solution in a single step without growing the constraint tree. Through extensive tests including physical robot experiments, we demonstrate that our method consistently reduces the number of expanded nodes in the constraint tree, achieves a higher success rate, and finds a solution faster compared to Enhanced CBS and other state-of-the-art algorithms.