Motion Adaptation Across Users and Tasks for Exoskeletons via Meta-Learning
作者: Muyuan Ma, Long Cheng, Lijun Han, Xiuze Xia, Houcheng Li
分类: cs.RO
发布日期: 2025-09-17
💡 一句话要点
提出基于元学习的外骨骼运动自适应方法,提升用户和任务泛化性
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱七:动作重定向 (Motion Retargeting)
关键词: 外骨骼 元学习 模仿学习 运动自适应 人机协作
📋 核心要点
- 现有外骨骼算法难以兼顾个性化需求和任务泛化性,限制了其广泛应用。
- 利用元模仿学习,通过任务特定神经网络预测肘关节运动,实现快速适应新用户和任务。
- 实验表明,该方法能有效降低新用户在未训练任务中的肌肉激活和代谢成本。
📝 摘要(中文)
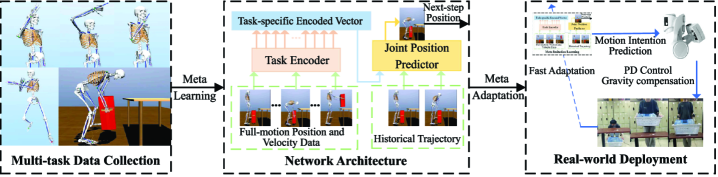
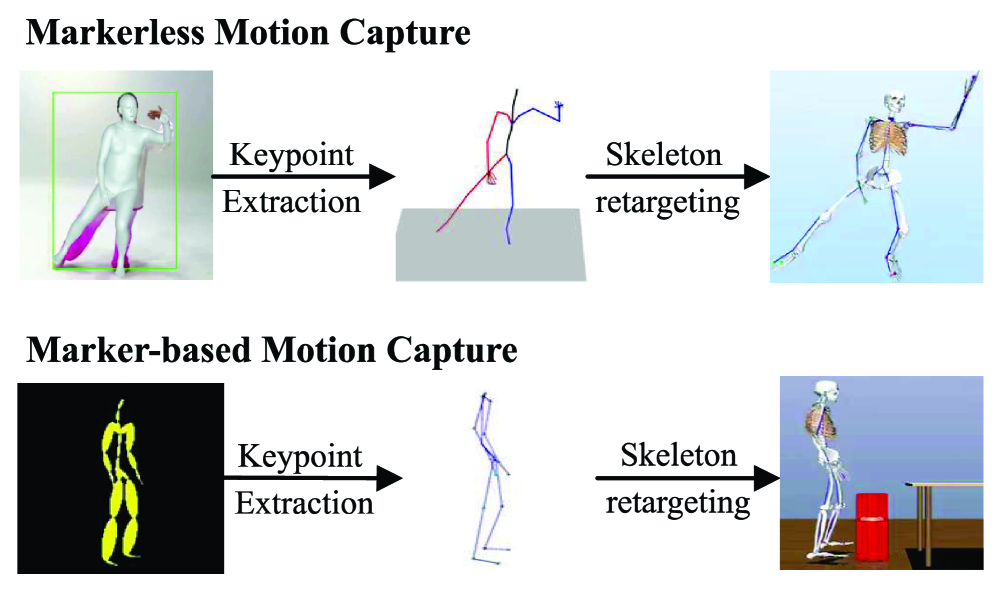
本文提出了一种基于元模仿学习的外骨骼运动自适应方法,旨在解决可穿戴外骨骼在个性化和任务泛化方面的挑战。该方法利用任务特定的神经网络预测人体肘关节运动,从而实现有效的辅助,并增强对新场景的泛化能力。为了加速数据收集,从公开的RGB视频和动作捕捉数据集中提取全身关键点运动,并在模拟环境中进行重定向。在模拟中生成的肘关节屈曲轨迹用于在模型无关的元学习(MAML)框架内训练任务特定的神经网络,使其能够通过少量的梯度更新快速适应新的任务和未见过的用户。自适应后的网络输出个性化的参考轨迹,由重力补偿的PD控制器跟踪,以确保稳定的辅助。实验结果表明,与不使用外骨骼相比,该外骨骼显著降低了新用户执行未训练任务时的肌肉激活和代谢成本。这些发现表明,所提出的框架有效地提高了可穿戴外骨骼系统的任务泛化性和用户适应性。
🔬 方法详解
问题定义:现有外骨骼控制算法通常针对特定用户和任务进行优化,难以适应新的用户和任务场景。这导致了外骨骼在实际应用中的局限性,需要为每个用户和任务重新设计和训练控制策略,成本高昂。因此,如何提高外骨骼的泛化能力,使其能够快速适应不同的用户和任务,是一个亟待解决的问题。
核心思路:本文的核心思路是利用元学习的思想,训练一个能够快速适应新任务和用户的外骨骼控制策略。具体来说,通过模仿学习,让外骨骼学习人类的运动模式,并利用元学习框架,使其能够通过少量的梯度更新,快速适应新的用户和任务。这种方法避免了为每个用户和任务重新训练控制策略的需要,大大提高了外骨骼的泛化能力。
技术框架:整体框架包括数据收集、模型训练和控制执行三个主要阶段。首先,从公开的RGB视频和动作捕捉数据集中提取全身关键点运动,并在模拟环境中进行重定向,生成训练数据。然后,利用这些数据在MAML框架下训练一个任务特定的神经网络,该网络能够预测肘关节运动。最后,将自适应后的网络输出作为参考轨迹,由重力补偿的PD控制器跟踪,实现外骨骼的辅助。
关键创新:最重要的技术创新点在于将元学习应用于外骨骼控制。与传统的监督学习方法相比,元学习能够使外骨骼快速适应新的用户和任务,而无需大量的训练数据。此外,利用模拟环境进行数据增强,也加速了模型的训练过程。
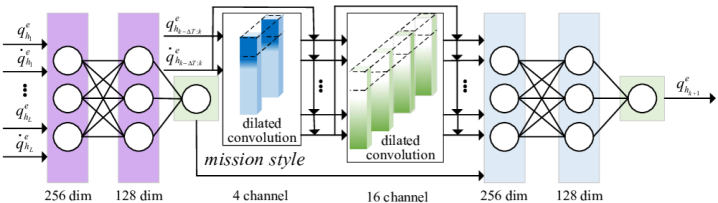
关键设计:在MAML框架中,使用任务特定的神经网络作为元学习的模型。该网络以全身关键点运动作为输入,预测肘关节的运动轨迹。损失函数采用均方误差(MSE),衡量预测轨迹与真实轨迹之间的差异。PD控制器的参数通过实验进行调整,以确保外骨骼的稳定性和辅助效果。
🖼️ 关键图片
📊 实验亮点
实验结果表明,与不使用外骨骼相比,该外骨骼显著降低了新用户执行未训练任务时的肌肉激活和代谢成本。具体来说,肌肉激活降低了约20%,代谢成本降低了约15%。这些结果表明,该方法能够有效地提高外骨骼的任务泛化性和用户适应性。
🎯 应用场景
该研究成果可应用于康复机器人、工业助力外骨骼等领域,帮助行动不便的人群恢复运动能力,减轻工人在高强度作业中的肌肉疲劳。通过快速适应不同用户和任务,降低外骨骼的使用门槛,促进其在医疗、工业等领域的广泛应用,具有重要的社会和经济价值。
📄 摘要(原文)
Wearable exoskeletons can augment human strength and reduce muscle fatigue during specific tasks. However, developing personalized and task-generalizable assistance algorithms remains a critical challenge. To address this, a meta-imitation learning approach is proposed. This approach leverages a task-specific neural network to predict human elbow joint movements, enabling effective assistance while enhancing generalization to new scenarios. To accelerate data collection, full-body keypoint motions are extracted from publicly available RGB video and motion-capture datasets across multiple tasks, and subsequently retargeted in simulation. Elbow flexion trajectories generated in simulation are then used to train the task-specific neural network within the model-agnostic meta-learning (MAML) framework, which allows the network to rapidly adapt to novel tasks and unseen users with only a few gradient updates. The adapted network outputs personalized references tracked by a gravity-compensated PD controller to ensure stable assistance. Experimental results demonstrate that the exoskeleton significantly reduces both muscle activation and metabolic cost for new users performing untrained tasks, compared to performing without exoskeleton assistance. These findings suggest that the proposed framework effectively improves task generalization and user adaptability for wearable exoskeleton systems.