Hydrosoft: Non-Holonomic Hydroelastic Models for Compliant Tactile Manipulation
作者: Miquel Oller, An Dang, Nima Fazeli
分类: cs.RO
发布日期: 2025-09-16
💡 一句话要点
提出Hydrosoft模型,解决柔顺触觉操作中非完整约束水弹性建模难题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 柔顺触觉传感器 水弹性模型 非完整约束 机器人操作 轨迹优化
📋 核心要点
- 现有触觉传感器在柔顺操作中面临挑战,难以捕捉柔顺元件引入的复杂非线性动力学,限制了其应用。
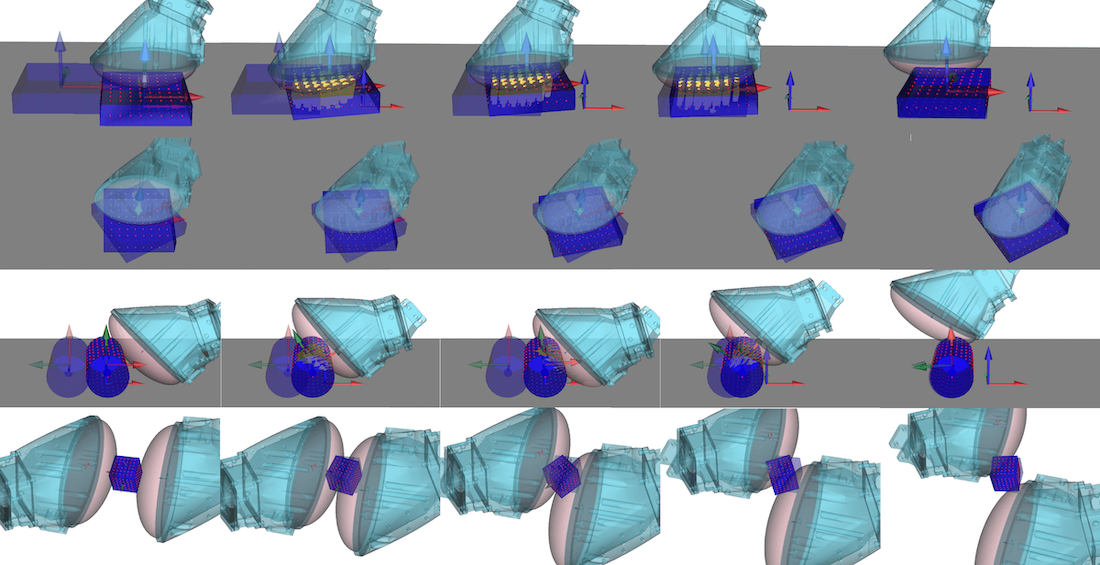
- Hydrosoft模型通过扩展对象状态空间,显式地包含柔顺传感器产生的分布式力,实现了对路径依赖行为的精确建模。
- 实验结果表明,该方法能够有效模拟路径相关的接触力分布和动态表面积变化,并支持基于梯度的轨迹优化。
📝 摘要(中文)
触觉传感器因其感知能力而备受重视,能够提供机器人与抓取物体之间隐藏界面的丰富信息。然而,其固有的柔顺性(force-rich交互的关键驱动因素)仍未被充分探索。核心挑战在于捕捉这些被动柔顺元件引入的复杂非线性动力学。本文提出了一种计算高效的非完整约束水弹性模型,该模型能够准确地模拟路径相关的接触力分布和动态表面积变化。核心思想是扩展对象的状态空间,显式地包含由柔顺传感器产生的分布式力。我们的可微公式不仅考虑了路径相关行为,还支持基于梯度的轨迹优化,从而与高分辨率触觉反馈无缝集成。我们通过一系列模拟和真实实验证明了该方法的有效性,并强调了对传感器动力学路径依赖性进行建模的重要性。
🔬 方法详解
问题定义:论文旨在解决柔顺触觉传感器在操作过程中,由于其自身形变带来的复杂非线性动力学建模问题。现有方法难以准确捕捉路径依赖的接触力分布和动态表面积变化,导致无法有效利用高分辨率触觉反馈进行精确操作。
核心思路:核心思路是将柔顺触觉传感器视为一种水弹性体,并将其形变产生的分布式力显式地纳入到对象的状态空间中。通过这种方式,可以将传感器的柔顺性建模为一种非完整约束,从而能够更准确地描述其动力学行为。
技术框架:该方法的核心是一个非完整约束水弹性模型。整体流程包括:1) 建立柔顺触觉传感器的水弹性模型;2) 将传感器形变产生的分布式力纳入对象的状态空间;3) 推导非完整约束下的动力学方程;4) 利用可微公式进行基于梯度的轨迹优化。
关键创新:最重要的技术创新在于将柔顺触觉传感器的形变建模为一种非完整约束,并将其与水弹性模型相结合。这种方法能够有效地捕捉路径依赖的接触力分布和动态表面积变化,从而提高了触觉操作的精度和鲁棒性。与现有方法相比,该方法能够更准确地描述传感器的动力学行为,并支持基于梯度的轨迹优化。
关键设计:论文中涉及的关键设计包括:1) 水弹性模型的参数选择,需要根据传感器的材料属性进行调整;2) 分布式力的计算方法,需要考虑传感器的形变和接触情况;3) 非完整约束的施加方式,需要保证动力学方程的稳定性和收敛性;4) 轨迹优化算法的选择,需要考虑计算效率和优化效果。
🖼️ 关键图片


📊 实验亮点
论文通过模拟和真实实验验证了Hydrosoft模型的有效性。实验结果表明,该模型能够准确地模拟路径相关的接触力分布和动态表面积变化,并支持基于梯度的轨迹优化。与传统方法相比,该方法能够显著提高触觉操作的精度和鲁棒性。具体性能数据未知。
🎯 应用场景
该研究成果可应用于机器人灵巧操作、医疗手术机器人、人机协作等领域。通过精确建模柔顺触觉传感器的动力学行为,可以提高机器人操作的精度和鲁棒性,使其能够更好地适应复杂和不确定的环境。此外,该方法还可以用于设计新型的柔顺触觉传感器,以满足不同应用场景的需求。
📄 摘要(原文)
Tactile sensors have long been valued for their perceptual capabilities, offering rich insights into the otherwise hidden interface between the robot and grasped objects. Yet their inherent compliance -- a key driver of force-rich interactions -- remains underexplored. The central challenge is to capture the complex, nonlinear dynamics introduced by these passive-compliant elements. Here, we present a computationally efficient non-holonomic hydroelastic model that accurately models path-dependent contact force distributions and dynamic surface area variations. Our insight is to extend the object's state space, explicitly incorporating the distributed forces generated by the compliant sensor. Our differentiable formulation not only accounts for path-dependent behavior but also enables gradient-based trajectory optimization, seamlessly integrating with high-resolution tactile feedback. We demonstrate the effectiveness of our approach across a range of simulated and real-world experiments and highlight the importance of modeling the path dependence of sensor dynamics.