Model Predictive Control with Reference Learning for Soft Robotic Intracranial Pressure Waveform Modulation
作者: Fabian Flürenbrock, Yanick Büchel, Johannes Köhler, Marianne Schmid Daners, Melanie N. Zeilinger
分类: cs.RO, eess.SY
发布日期: 2025-09-16
💡 一句话要点
提出基于参考学习的模型预测控制,用于软体机器人颅内压波形调节
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 模型预测控制 贝叶斯优化 颅内压调节 参考学习
📋 核心要点
- 颅内压波形调节对于研究神经系统疾病至关重要,但ICP与电机位置的非线性关系难以建模。
- 提出双层控制框架,结合模型预测控制(MPC)和贝叶斯优化(BO),实现安全精确的ICP波形调节。
- 实验表明,该方法显著降低了电机位置跟踪误差,并在少量迭代内学习到期望的ICP波形。
📝 摘要(中文)
本文提出了一种基于学习的控制框架,用于软体机器人执行器的颅内压(ICP)波形调节,这对于研究脑脊液动力学和神经系统疾病的病理过程至关重要。该框架采用双层结构,以安全地实现所需的ICP波形调节。首先,使用带有扰动观测器的模型预测控制器(MPC),在安全约束下对系统的电机位置参考轨迹进行无偏移跟踪。其次,为了解决ICP对电机位置的未知非线性依赖关系,我们采用贝叶斯优化(BO)算法在线学习电机位置参考轨迹,从而产生所需的ICP调节。通过使用脑部模型在体外复制真实ICP动力学的测试平台,对该框架进行了实验验证。与先前使用的比例-积分-微分控制器相比,MPC将平均和最大电机位置参考跟踪误差分别降低了83%和73%。在不到20次迭代中,BO算法学习到了一个电机位置参考轨迹,该轨迹产生了具有所需平均值和幅度的ICP波形。
🔬 方法详解
问题定义:本文旨在解决软体机器人颅内压(ICP)波形调节问题。现有方法,如PID控制,难以应对ICP与电机位置之间的复杂非线性关系,导致控制精度不足,且难以保证安全性。此外,精确的ICP动力学模型难以获取,进一步加剧了控制的复杂性。
核心思路:论文的核心思路是将控制问题分解为两个层次。第一层使用模型预测控制(MPC)进行电机位置的精确跟踪,保证安全约束。第二层使用贝叶斯优化(BO)在线学习电机位置的参考轨迹,以实现期望的ICP波形。这种分层结构能够有效处理系统的非线性、不确定性和安全约束。
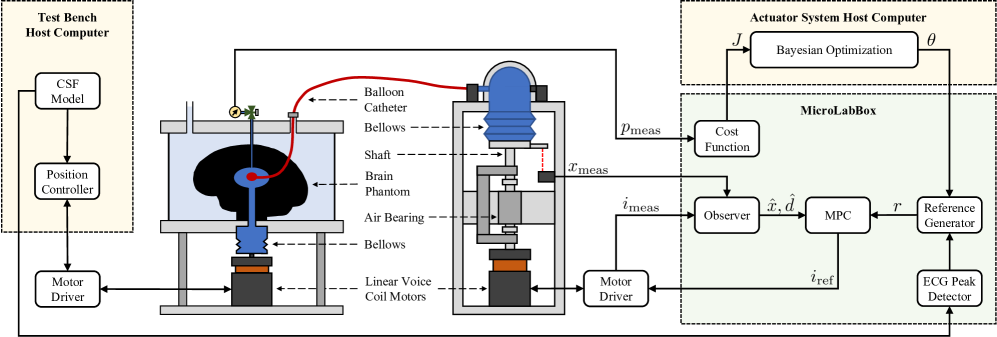
技术框架:该控制框架包含两个主要模块:1) 基于扰动观测器的模型预测控制器(MPC):该模块负责跟踪由BO算法生成的电机位置参考轨迹,同时考虑系统的安全约束。扰动观测器用于估计和补偿系统中的未知扰动。2) 基于贝叶斯优化(BO)的参考轨迹学习模块:该模块通过在线实验,学习一个电机位置参考轨迹,使得系统产生的ICP波形尽可能接近期望的波形。BO算法利用高斯过程模型对ICP与电机位置之间的关系进行建模,并使用采集函数指导实验过程。
关键创新:该论文的关键创新在于将模型预测控制和贝叶斯优化相结合,形成一个闭环学习控制框架。MPC保证了电机位置的精确跟踪和安全性,而BO则负责学习系统的未知非线性特性,从而实现期望的ICP波形调节。这种方法无需精确的系统模型,能够适应系统的变化和不确定性。
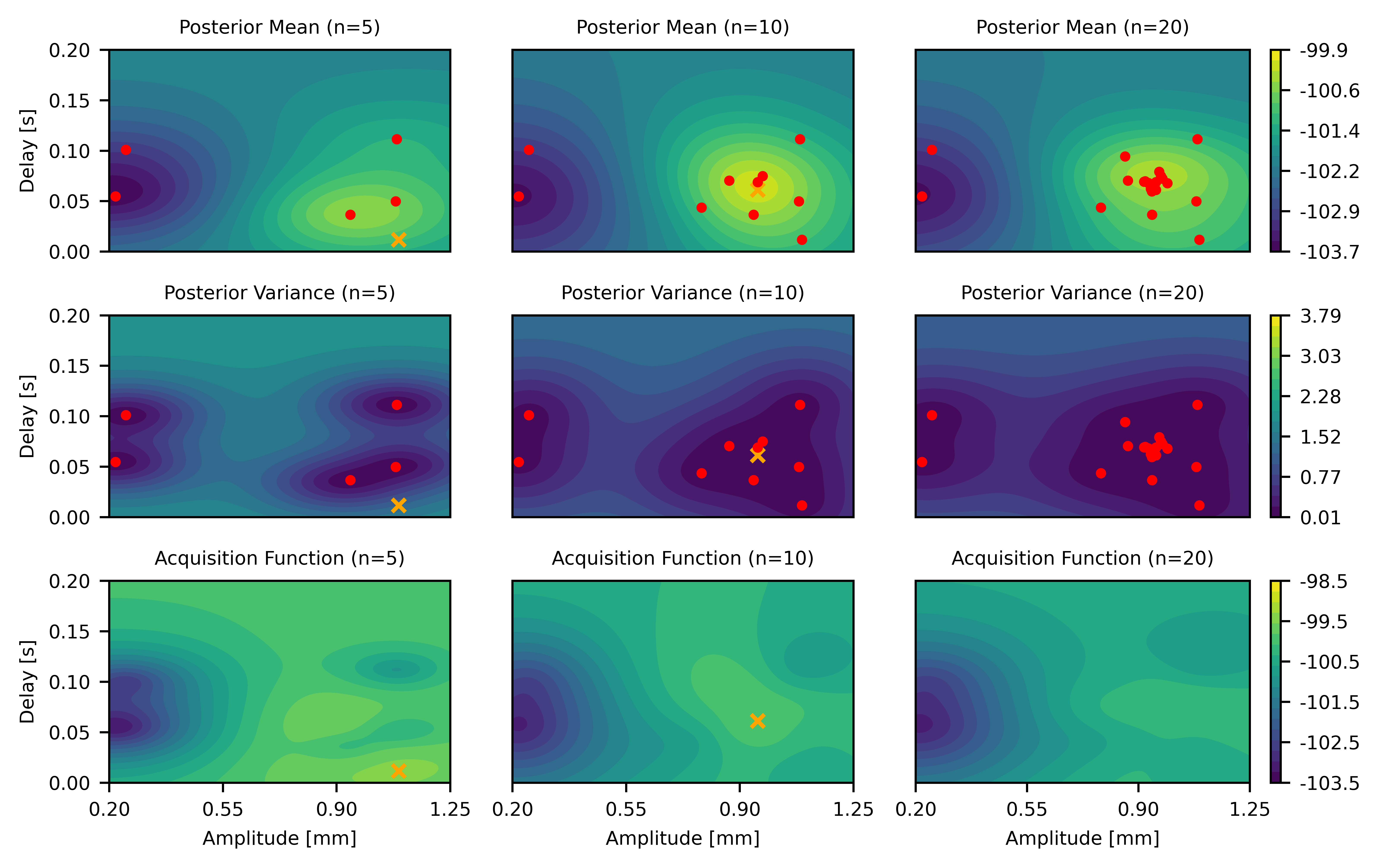
关键设计:MPC采用线性时变模型预测控制,目标函数包含电机位置跟踪误差和控制输入的惩罚项。安全约束包括电机位置和速度的限制。BO算法使用高斯过程回归对ICP与电机位置之间的关系进行建模,采集函数选择Expected Improvement。实验中,BO算法的迭代次数设置为20次,以在精度和效率之间取得平衡。
🖼️ 关键图片
📊 实验亮点
实验结果表明,与传统的PID控制器相比,所提出的MPC将平均和最大电机位置参考跟踪误差分别降低了83%和73%。此外,贝叶斯优化算法在不到20次迭代中,成功学习到了一个电机位置参考轨迹,该轨迹产生了具有所需平均值和幅度的ICP波形。这些结果验证了该控制框架的有效性和优越性。
🎯 应用场景
该研究成果可应用于软体机器人辅助的神经外科手术、脑脊液动力学研究和神经系统疾病的病理机制研究。通过精确控制颅内压波形,可以更深入地了解脑脊液循环的规律,并为开发新的治疗方法提供依据。此外,该方法也可推广到其他需要精确控制和在线学习的软体机器人应用场景。
📄 摘要(原文)
This paper introduces a learning-based control framework for a soft robotic actuator system designed to modulate intracranial pressure (ICP) waveforms, which is essential for studying cerebrospinal fluid dynamics and pathological processes underlying neurological disorders. A two-layer framework is proposed to safely achieve a desired ICP waveform modulation. First, a model predictive controller (MPC) with a disturbance observer is used for offset-free tracking of the system's motor position reference trajectory under safety constraints. Second, to address the unknown nonlinear dependence of ICP on the motor position, we employ a Bayesian optimization (BO) algorithm used for online learning of a motor position reference trajectory that yields the desired ICP modulation. The framework is experimentally validated using a test bench with a brain phantom that replicates realistic ICP dynamics in vitro. Compared to a previously employed proportional-integral-derivative controller, the MPC reduces mean and maximum motor position reference tracking errors by 83 % and 73 %, respectively. In less than 20 iterations, the BO algorithm learns a motor position reference trajectory that yields an ICP waveform with the desired mean and amplitude.