Empowering Multi-Robot Cooperation via Sequential World Models
作者: Zijie Zhao, Honglei Guo, Shengqian Chen, Kaixuan Xu, Bo Jiang, Yuanheng Zhu, Dongbin Zhao
分类: cs.RO
发布日期: 2025-09-16 (更新: 2025-09-26)
💡 一句话要点
SeqWM:通过序列化世界模型赋能多机器人协作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 多机器人协作 强化学习 世界模型 序列化建模 机器人控制
📋 核心要点
- 多机器人协作面临联合动力学复杂和依赖同步通信的挑战,限制了基于模型的强化学习的应用。
- SeqWM采用独立的agent-wise世界模型,通过序列化预测和规划,降低建模复杂性并减少对同步通信的依赖。
- 实验表明,SeqWM在模拟和真实机器人平台上均优于现有方法,并展现出预测适应、时间对齐等高级协作行为。
📝 摘要(中文)
基于模型的强化学习(MBRL)由于其高样本效率和规划能力,在机器人领域展现出巨大的潜力。然而,由于联合动力学的复杂性和对同步通信的依赖,将MBRL扩展到多机器人协作仍然具有挑战性。SeqWM采用独立的、自回归的agent-wise世界模型来表示联合动力学,其中每个agent生成其未来的轨迹,并基于其前任的预测来规划其动作。这种设计降低了建模的复杂性,减轻了对通信同步的依赖,并通过显式的意图共享实现了高级协作行为的出现。在具有挑战性的模拟环境(Bi-DexHands和Multi-Quad)中的实验表明,SeqWM在整体性能和样本效率方面都优于现有的最先进的基于模型和无模型的基线,同时表现出高级的协作行为,如预测适应、时间对齐和角色分工。此外,SeqWM已成功部署在物理四足机器人上,证明了其在真实世界多机器人系统中的有效性。
🔬 方法详解
问题定义:多机器人协作中,直接对所有机器人进行联合建模非常复杂,计算量巨大,且对通信的同步性要求高。现有的方法难以在复杂环境中实现高效的协作学习,尤其是在真实机器人平台上。
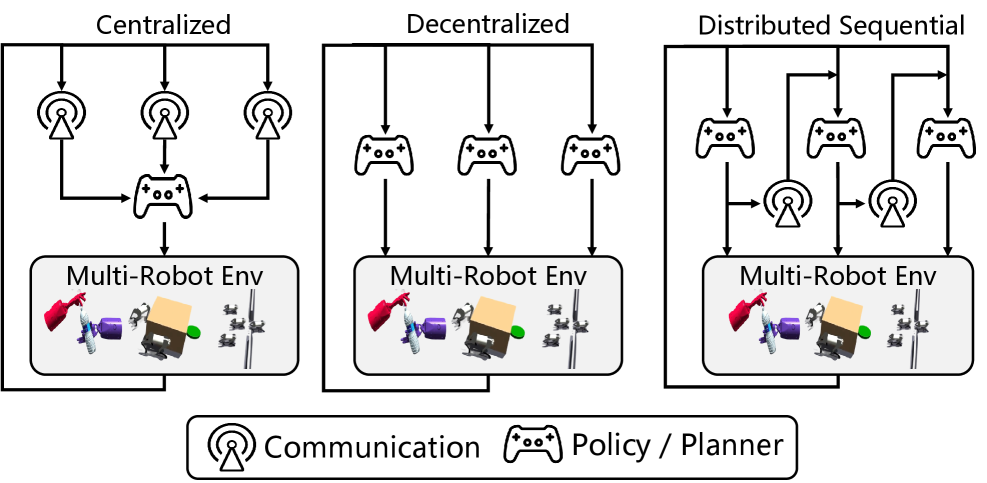
核心思路:SeqWM的核心思想是将联合动力学分解为一系列独立的、自回归的agent-wise世界模型。每个agent只对自身的状态和环境进行建模,并依赖于其“前任”agent的预测结果来规划自己的动作。通过这种序列化的方式,降低了建模的复杂性,并且减少了对全局同步通信的需求。
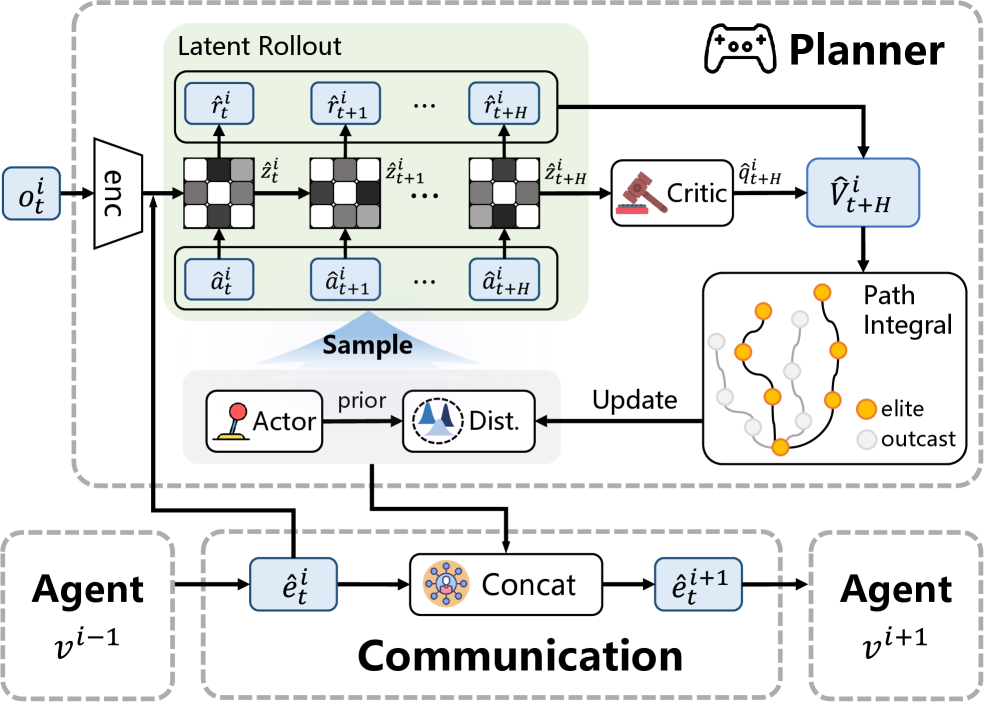
技术框架:SeqWM的整体框架包含多个独立的agent-wise世界模型。每个agent的世界模型接收自身的状态和前任agent的预测轨迹作为输入,预测自身未来的状态和奖励。然后,每个agent使用这些预测结果进行规划,选择最优的动作。整个过程是序列化的,即agent按照预定义的顺序依次进行预测和规划。
关键创新:SeqWM最重要的创新在于其序列化的世界模型结构。与传统的联合建模方法不同,SeqWM将复杂的联合动力学分解为一系列独立的agent-wise模型,从而显著降低了建模的复杂性。此外,通过序列化的预测和规划,SeqWM能够实现agent之间的隐式通信和协作,而无需显式的通信协议。
关键设计:每个agent-wise世界模型通常采用循环神经网络(RNN)或Transformer等序列模型来实现。损失函数包括状态预测误差、奖励预测误差和动作规划误差等。Agent的顺序可以根据任务的特点进行设计,例如,可以按照重要性或依赖关系进行排序。在真实机器人平台上,需要考虑传感器噪声和执行器误差等因素,并采用鲁棒的控制策略。
🖼️ 关键图片

📊 实验亮点
SeqWM在Bi-DexHands和Multi-Quad模拟环境中显著优于现有的基于模型和无模型的基线方法。例如,在Bi-DexHands任务中,SeqWM的成功率比SAC提高了约20%。此外,SeqWM成功部署在物理四足机器人上,实现了多机器人协同行走,验证了其在真实世界中的有效性。实验结果表明,SeqWM能够实现预测适应、时间对齐和角色分工等高级协作行为。
🎯 应用场景
SeqWM具有广泛的应用前景,例如:多机器人协同搬运、多无人机协同搜索与救援、自动驾驶车队的协同控制等。该方法能够降低多机器人系统的开发和部署成本,提高系统的鲁棒性和适应性,并促进更高级的协作行为的涌现。未来,SeqWM有望应用于更复杂的机器人系统,例如人机协作机器人、群体机器人等。
📄 摘要(原文)
Model-based reinforcement learning (MBRL) has shown significant potential in robotics due to its high sample efficiency and planning capability. However, extending MBRL to multi-robot cooperation remains challenging due to the complexity of joint dynamics and the reliance on synchronous communication. SeqWM employs independent, autoregressive agent-wise world models to represent joint dynamics, where each agent generates its future trajectory and plans its actions based on the predictions of its predecessors. This design lowers modeling complexity, alleviates the reliance on communication synchronization, and enables the emergence of advanced cooperative behaviors through explicit intention sharing. Experiments in challenging simulated environments (Bi-DexHands and Multi-Quad) demonstrate that SeqWM outperforms existing state-of-the-art model-based and model-free baselines in both overall performance and sample efficiency, while exhibiting advanced cooperative behaviors such as predictive adaptation, temporal alignment, and role division. Furthermore, SeqWM has been success fully deployed on physical quadruped robots, demonstrating its effectiveness in real-world multi-robot systems. Demos and code are available at: https://sites.google.com/view/seqwm-marl