Underactuated Robotic Hand with Grasp State Estimation Using Tendon-Based Proprioception
作者: Jae-Hyun Lee, Jonghoo Park, Kyu-Jin Cho
分类: cs.RO
发布日期: 2025-09-16 (更新: 2025-11-28)
备注: 11 pages, 15 figures, 3 tables, Supplementary video
💡 一句话要点
提出基于肌腱本体感受的欠驱动机械手抓取状态估计方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 欠驱动机械手 抓取状态估计 肌腱本体感受 串联弹性驱动器 势能建模
📋 核心要点
- 现有欠驱动机械手难以在不增加结构复杂性的前提下准确捕捉抓取状态。
- 该论文提出了一种基于肌腱本体感受的欠驱动手,利用串联弹性驱动器(SEA)进行抓取状态估计。
- 实验验证表明,该方法能够有效估计接触时间、关节角度、物体刚度和外部扰动等关键变量。
📝 摘要(中文)
拟人化的欠驱动机械手因其结构简单和内在适应性而备受重视。然而,相互依赖的关节运动带来的不确定性使得在手-物交互过程中难以捕捉各种抓取状态,除非通过多个嵌入式传感器来增加结构复杂性。这促使人们需要一种能够从单一传感源提取丰富的抓取状态信息,同时保持欠驱动手简单性的方法。本研究提出了一种拟人化的欠驱动手,它仅使用由串联弹性驱动器(SEA)提供的基于肌腱的本体感受来实现全面的抓取状态估计。我们的方法得益于紧凑、高精度和高可靠性的SEA设计,该SEA可以无缝集成到无传感器手指中。通过将精确的本体感受测量与基于势能的建模相结合,该系统可以估计多个关键的抓取状态变量,包括接触时间、关节角度、相对物体刚度和外部扰动。手指级别的实验验证和广泛的手部抓取功能演示证实了所提出方法的有效性。这些结果突出了基于肌腱的本体感受作为一种紧凑而稳健的传感方式,适用于无需依赖视觉或触觉反馈的实际操作。
🔬 方法详解
问题定义:欠驱动机械手由于其固有的关节耦合特性,难以准确估计抓取状态。传统的解决方案通常依赖于增加额外的传感器,例如力/扭矩传感器或视觉系统,这增加了机械手的复杂性和成本。因此,如何在保持欠驱动手结构简单性的前提下,实现精确的抓取状态估计是一个关键问题。
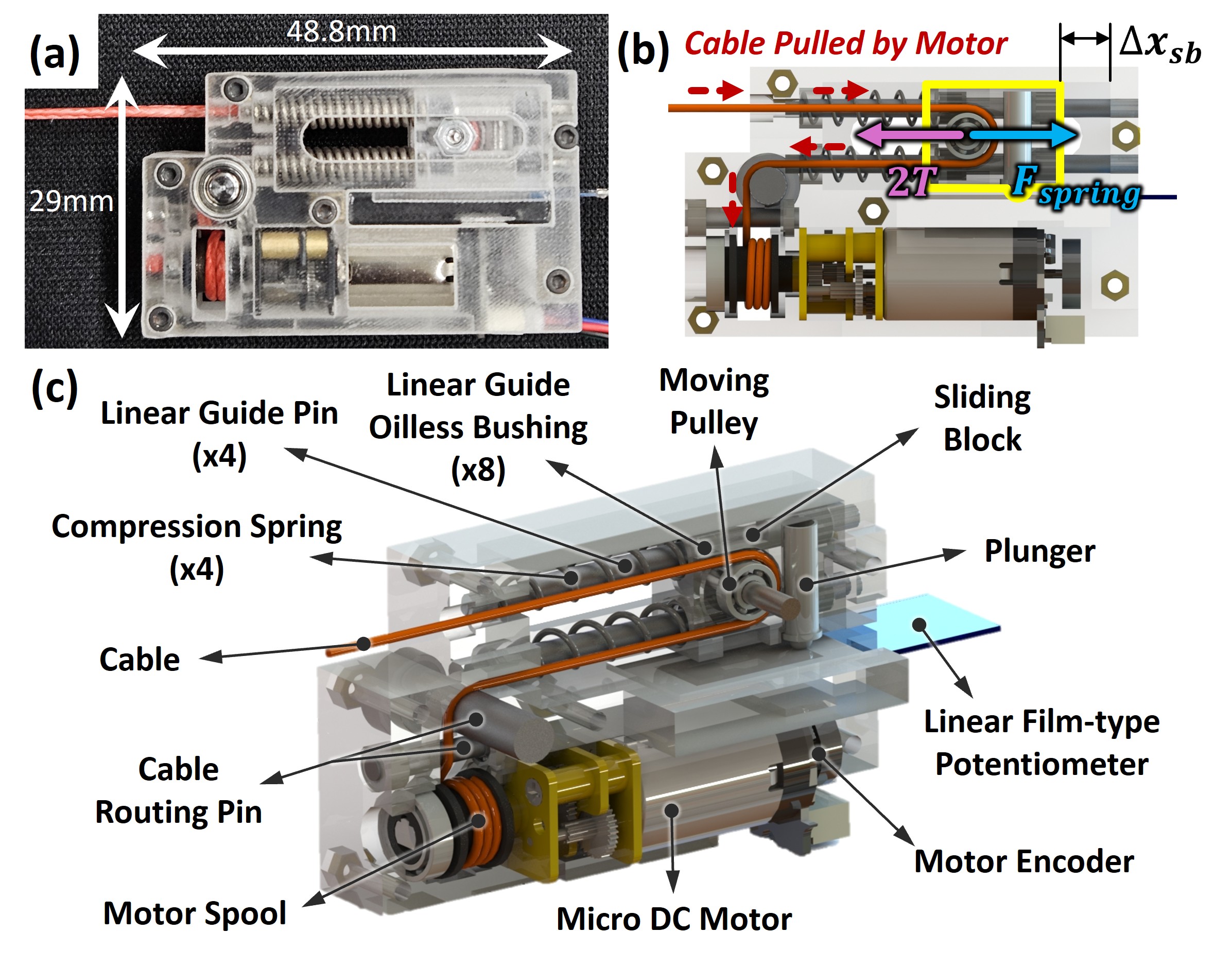
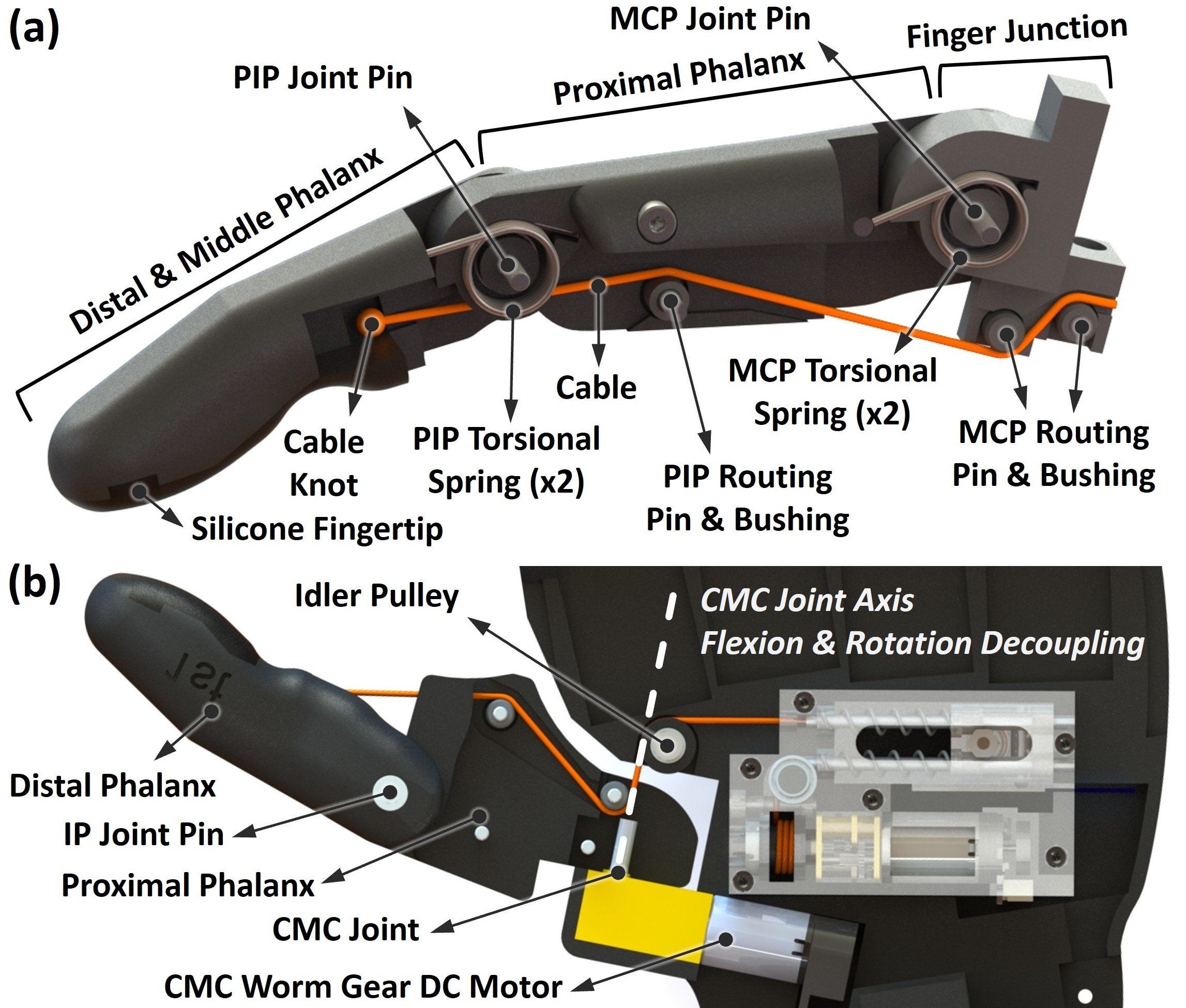
核心思路:该论文的核心思路是利用肌腱的本体感受信息来推断抓取状态。通过在手指中集成串联弹性驱动器(SEA),可以精确测量肌腱的张力,从而反映关节的运动和受力情况。结合基于势能的建模方法,可以将肌腱张力与抓取状态变量(如接触时间、关节角度、物体刚度等)联系起来。
技术框架:该方法的技术框架主要包括以下几个模块:1) 紧凑型SEA设计与集成:设计高精度、高可靠性的SEA,并将其集成到欠驱动手指中。2) 肌腱张力测量:利用SEA测量肌腱的张力信息。3) 基于势能的建模:建立肌腱张力与抓取状态变量之间的关系模型。4) 抓取状态估计:利用肌腱张力测量值和势能模型,估计抓取状态变量。
关键创新:该论文的关键创新在于利用肌腱本体感受作为主要的传感模态,实现了欠驱动机械手的抓取状态估计。与传统的依赖于外部传感器或视觉的方法相比,该方法具有结构简单、成本低廉、鲁棒性强等优点。此外,紧凑型SEA的设计也是一个重要的创新点,它使得肌腱张力的精确测量成为可能。
关键设计:SEA的关键设计包括:1) 采用高精度的力传感器测量弹性元件的形变,从而推断肌腱张力。2) 优化弹性元件的刚度,以提高测量灵敏度和动态范围。3) 采用紧凑的结构设计,以便于集成到欠驱动手指中。在抓取状态估计方面,论文采用了基于势能的建模方法,通过最小化势能函数来估计抓取状态变量。势能函数的设计需要考虑肌腱张力、关节角度和物体刚度等因素。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法能够准确估计接触时间、关节角度、相对物体刚度和外部扰动等关键抓取状态变量。手指级别的实验验证了SEA的精度和可靠性。手部抓取功能演示表明,该机械手能够成功抓取各种形状和尺寸的物体,并能够适应不同的抓取姿势。与传统的基于视觉或触觉的抓取方法相比,该方法具有更高的鲁棒性和更低的成本。
🎯 应用场景
该研究成果可应用于各种需要灵巧操作的机器人领域,例如:工业自动化中的装配和分拣任务、医疗机器人中的手术辅助、以及服务机器人中的物体抓取和操作。该方法无需依赖视觉或触觉反馈,使其在环境光照条件差或物体表面复杂的情况下具有优势。未来,该技术有望推动欠驱动机械手在更广泛的实际场景中应用。
📄 摘要(原文)
Anthropomorphic underactuated hands are valued for their structural simplicity and inherent adaptability. However, the uncertainty arising from interdependent joint motions makes it challenging to capture various grasp states during hand-object interaction without increasing structural complexity through multiple embedded sensors. This motivates the need for an approach that can extract rich grasp-state information from a single sensing source while preserving the simplicity of underactuation. This study proposes an anthropomorphic underactuated hand that achieves comprehensive grasp state estimation, using only tendon-based proprioception provided by series elastic actuators (SEAs). Our approach is enabled by the design of a compact SEA with high accuracy and reliability that can be seamlessly integrated into sensorless fingers. By coupling accurate proprioceptive measurements with potential energy-based modeling, the system estimates multiple key grasp state variables, including contact timing, joint angles, relative object stiffness, and external disturbances. Finger-level experimental validations and extensive hand-level grasp functionality demonstrations confirmed the effectiveness of the proposed approach. These results highlight tendon-based proprioception as a compact and robust sensing modality for practical manipulation without reliance on vision or tactile feedback.