Augmented Reality-Enhanced Robot Teleoperation for Collecting User Demonstrations
作者: Shiqi Gong, Sebastian Zudaire, Chi Zhang, Zhen Li
分类: cs.RO
发布日期: 2025-09-15
备注: Accepted by 2025 8th International Conference on Robotics, Control and Automation Engineering (RCAE 2025)
💡 一句话要点
提出基于增强现实的机器人遥操作系统,用于收集用户示教数据。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 增强现实 机器人遥操作 编程演示 点云渲染 人机交互
📋 核心要点
- 传统机器人编程耗时且复杂,编程演示方法在界面直观性上存在挑战。
- 提出基于增强现实的机器人遥操作系统,通过AR控制和点云渲染实现非接触式演示。
- 实验表明,增强感知显著提升任务性能28%,系统可用性量表得分提高12%。
📝 摘要(中文)
传统的工业机器人编程复杂且耗时,通常需要专家程序员花费数周甚至数月。编程演示(PbD)提供了一种更易于访问的替代方案,但机器人控制和演示收集的直观界面仍然具有挑战性。为了解决这个问题,我们提出了一种增强现实(AR)增强的机器人遥操作系统,该系统集成了基于AR的控制与空间点云渲染,从而实现直观的非接触式演示。该方法允许操作员远程控制机器人,而无需进入工作区或使用示教器等传统工具。该系统具有通用性,已在ABB机器人平台上进行了演示,并使用IRB 1200工业机器人和GoFa 5协作机器人进行了验证。用户研究评估了实时环境感知(特别是使用和不使用点云渲染)对任务完成准确性、效率和用户信心的影响。结果表明,增强的感知显著提高了任务性能28%,并通过系统可用性量表(SUS)得分提高12%来反映用户体验的提升。这项工作有助于推动工业环境中用于演示收集的直观机器人遥操作、AR界面设计、环境感知和遥操作安全机制的发展。收集到的演示可以作为机器学习应用的宝贵训练数据。
🔬 方法详解
问题定义:工业机器人编程通常需要专业的编程人员,耗时较长。编程演示(PbD)虽然降低了编程门槛,但缺乏直观的机器人控制和示教数据收集界面,操作人员难以高效地进行示教。
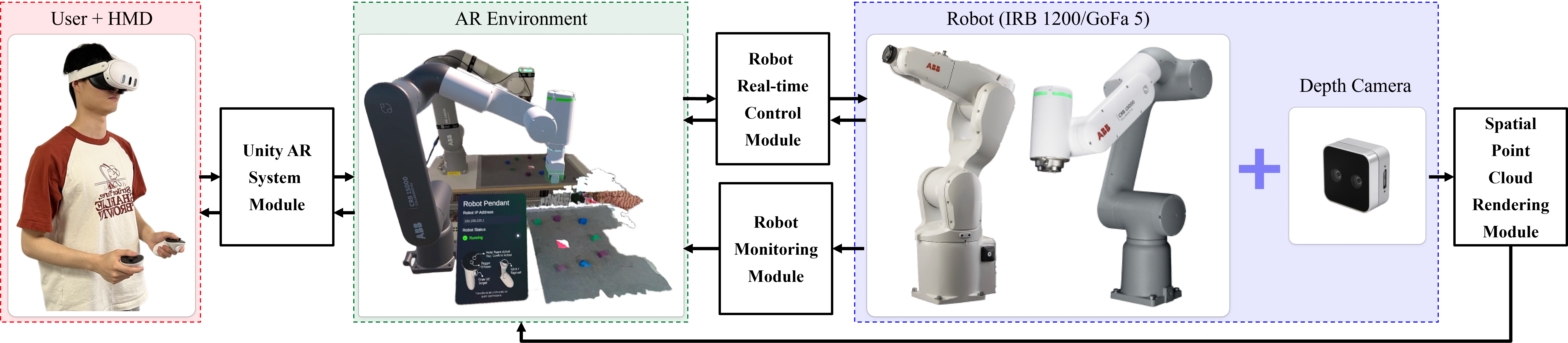
核心思路:利用增强现实(AR)技术,将虚拟控制界面叠加到真实环境中,操作人员可以通过AR界面远程控制机器人,并结合点云渲染提供环境感知,从而实现直观、安全的机器人遥操作和示教数据收集。
技术框架:该系统主要包含三个模块:1) AR控制界面:操作人员通过AR设备观察和控制机器人;2) 机器人遥操作:将AR控制指令转换为机器人运动指令;3) 环境感知:通过点云渲染提供实时环境信息,辅助操作人员进行精确控制。整个流程无需进入机器人工作空间,提高了安全性。
关键创新:该方法的核心创新在于将AR技术与机器人遥操作相结合,并利用点云渲染增强环境感知。与传统的示教器相比,AR界面更加直观易用,且无需直接接触机器人,降低了安全风险。与纯视觉遥操作相比,点云渲染提供了更精确的空间信息。
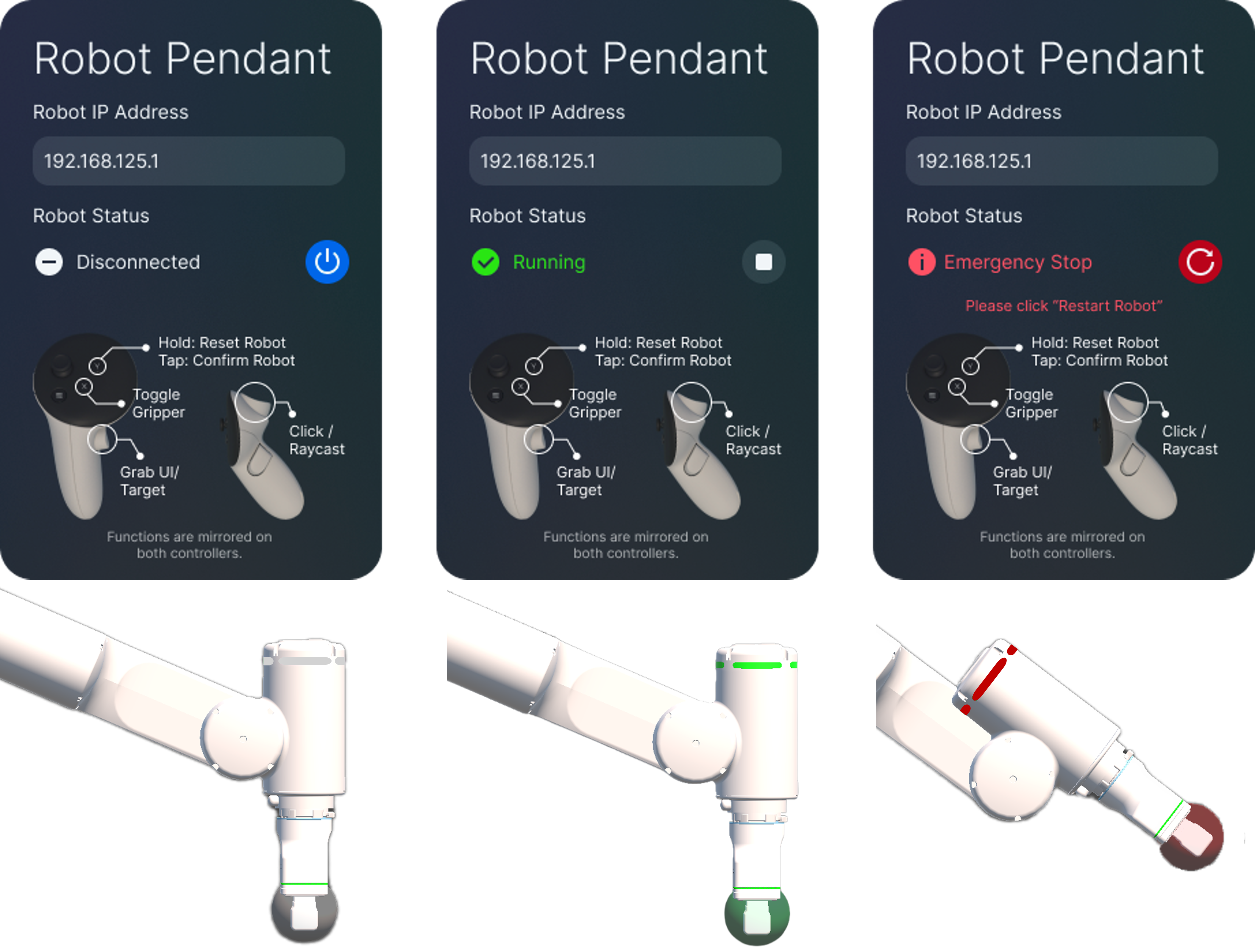
关键设计:AR控制界面设计需要考虑操作的便捷性和精度,例如采用虚拟按钮、手势识别等方式进行控制。点云渲染的质量直接影响环境感知的效果,需要选择合适的传感器和渲染算法。遥操作的控制算法需要保证机器人的运动平滑性和稳定性,避免抖动或碰撞。
🖼️ 关键图片

📊 实验亮点
用户研究表明,与没有点云渲染的系统相比,使用点云渲染的AR遥操作系统在任务完成准确性上提高了28%。同时,系统可用性量表(SUS)得分提高了12%,表明用户对该系统的易用性和满意度更高。这些结果表明,增强的环境感知显著提升了机器人遥操作的性能和用户体验。
🎯 应用场景
该研究成果可应用于各种工业机器人遥操作场景,例如危险环境下的远程操作、复杂装配任务的示教、以及机器人技能学习的数据收集。通过降低机器人编程的门槛,可以加速机器人在制造业中的普及,并提高生产效率。此外,该系统收集的示教数据可用于训练机器学习模型,实现机器人的自主学习和智能化。
📄 摘要(原文)
Traditional industrial robot programming is often complex and time-consuming, typically requiring weeks or even months of effort from expert programmers. Although Programming by Demonstration (PbD) offers a more accessible alternative, intuitive interfaces for robot control and demonstration collection remain challenging. To address this, we propose an Augmented Reality (AR)-enhanced robot teleoperation system that integrates AR-based control with spatial point cloud rendering, enabling intuitive, contact-free demonstrations. This approach allows operators to control robots remotely without entering the workspace or using conventional tools like the teach pendant. The proposed system is generally applicable and has been demonstrated on ABB robot platforms, specifically validated with the IRB 1200 industrial robot and the GoFa 5 collaborative robot. A user study evaluates the impact of real-time environmental perception, specifically with and without point cloud rendering, on task completion accuracy, efficiency, and user confidence. Results indicate that enhanced perception significantly improves task performance by 28% and enhances user experience, as reflected by a 12% increase in the System Usability Scale (SUS) score. This work contributes to the advancement of intuitive robot teleoperation, AR interface design, environmental perception, and teleoperation safety mechanisms in industrial settings for demonstration collection. The collected demonstrations may serve as valuable training data for machine learning applications.