Follow-Bench: A Unified Motion Planning Benchmark for Socially-Aware Robot Person Following
作者: Hanjing Ye, Weixi Situ, Jianwei Peng, Yu Zhan, Bingyi Xia, Kuanqi Cai, Hong Zhang
分类: cs.RO
发布日期: 2025-09-13 (更新: 2025-10-11)
备注: Project page: https://follow-bench.github.io/
💡 一句话要点
提出Follow-Bench,用于评估和提升社交感知机器人跟随的运动规划算法。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人跟随 运动规划 社交感知 基准测试 安全性 舒适性 仿真实验 真实实验
📋 核心要点
- 现有机器人跟随方法在安全性和舒适性方面考虑不足,缺乏统一的评估标准和基准。
- 提出Follow-Bench,通过模拟多样化的场景和人群动态,为机器人跟随提供全面的评估平台。
- 通过仿真和真实实验,对现有算法进行定量分析,揭示安全-舒适权衡,并指明未来研究方向。
📝 摘要(中文)
机器人跟随(RPF)在个人助理、安保巡逻、养老服务和物流等领域具有新兴应用。为了有效,机器人必须在跟随目标的同时,确保目标和周围人员的安全和舒适。本文对RPF进行了首次全面研究,包括:(i) 调研了代表性场景、运动规划方法和评估指标,重点关注安全性和舒适性;(ii) 提出了Follow-Bench,一个统一的基准,模拟了各种场景,包括不同的目标轨迹模式、人群动态和环境布局;(iii) 重新实现了六种具有代表性的RPF规划器,确保系统地考虑安全性和舒适性。此外,我们在差速驱动机器人上评估了基准测试中表现最佳的两个规划器,以深入了解RPF规划器的实际部署。大量的仿真和真实世界实验对现有规划器的安全-舒适权衡进行了定量研究,同时揭示了开放的挑战和未来的研究方向。
🔬 方法详解
问题定义:机器人跟随(RPF)旨在使机器人能够安全、舒适地跟随目标人物。现有方法的痛点在于缺乏一个统一的、综合性的评估框架,难以系统地比较不同算法在安全性、舒适性和效率方面的性能。此外,现有方法往往只关注单一场景,泛化能力不足。
核心思路:Follow-Bench的核心思路是构建一个包含多样化场景、人群动态和评估指标的统一基准,从而能够全面、客观地评估和比较不同的RPF规划器。通过系统地考虑安全性和舒适性,为RPF算法的开发和改进提供指导。
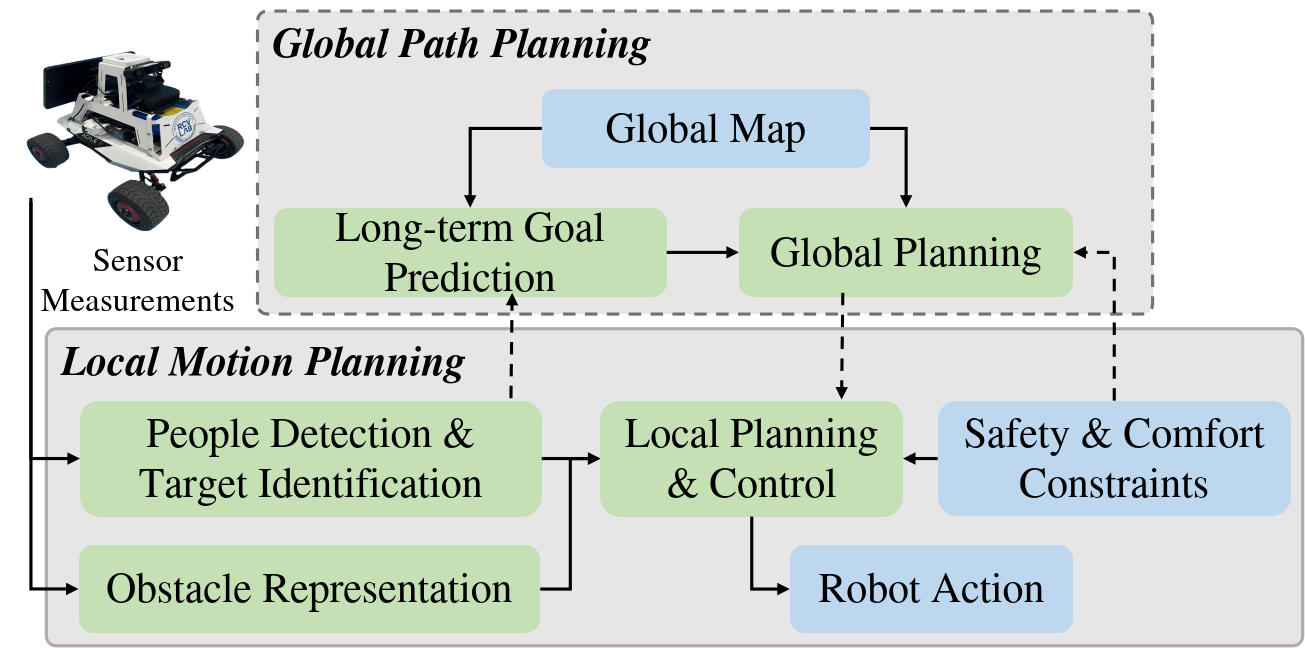
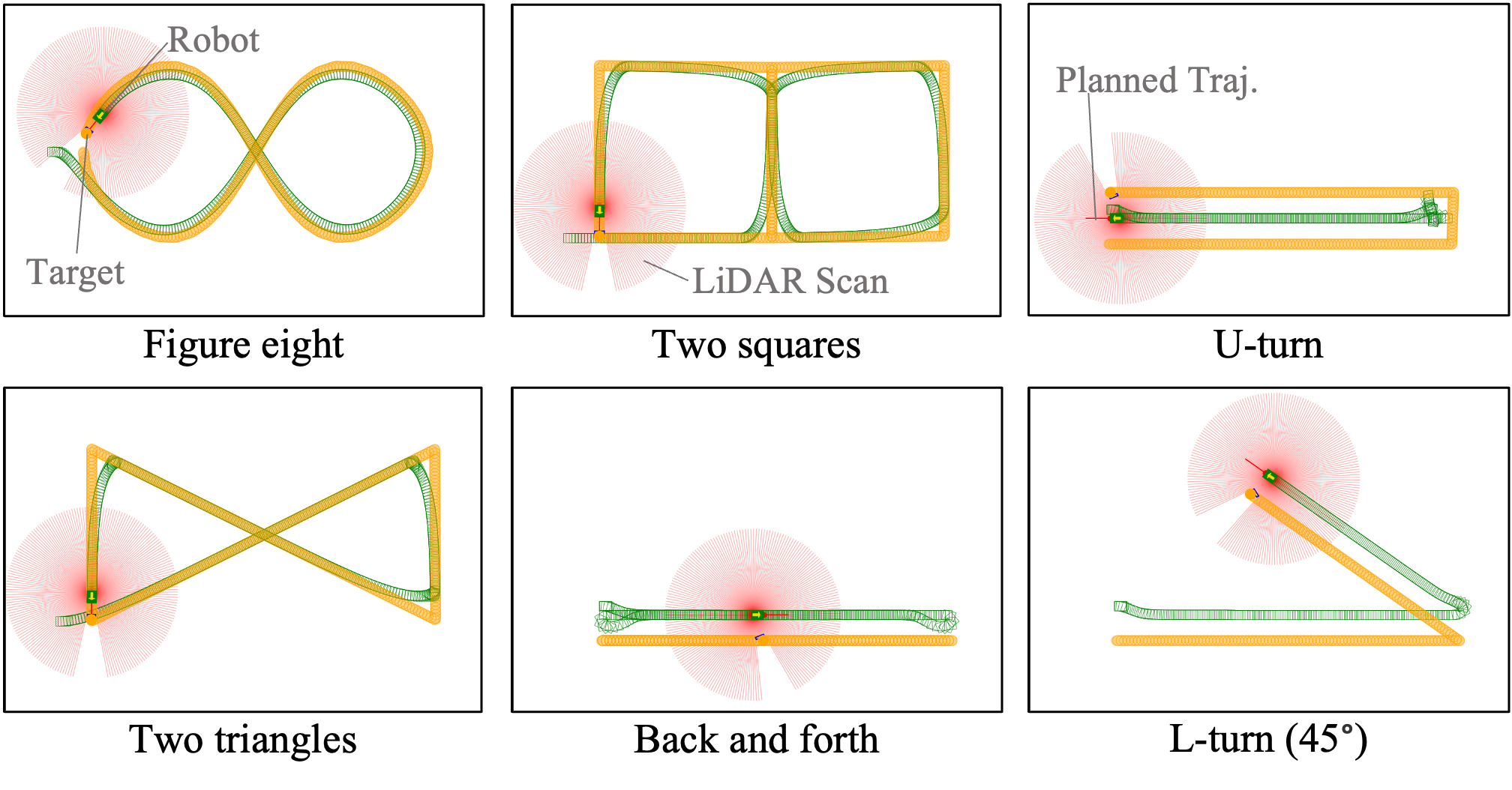
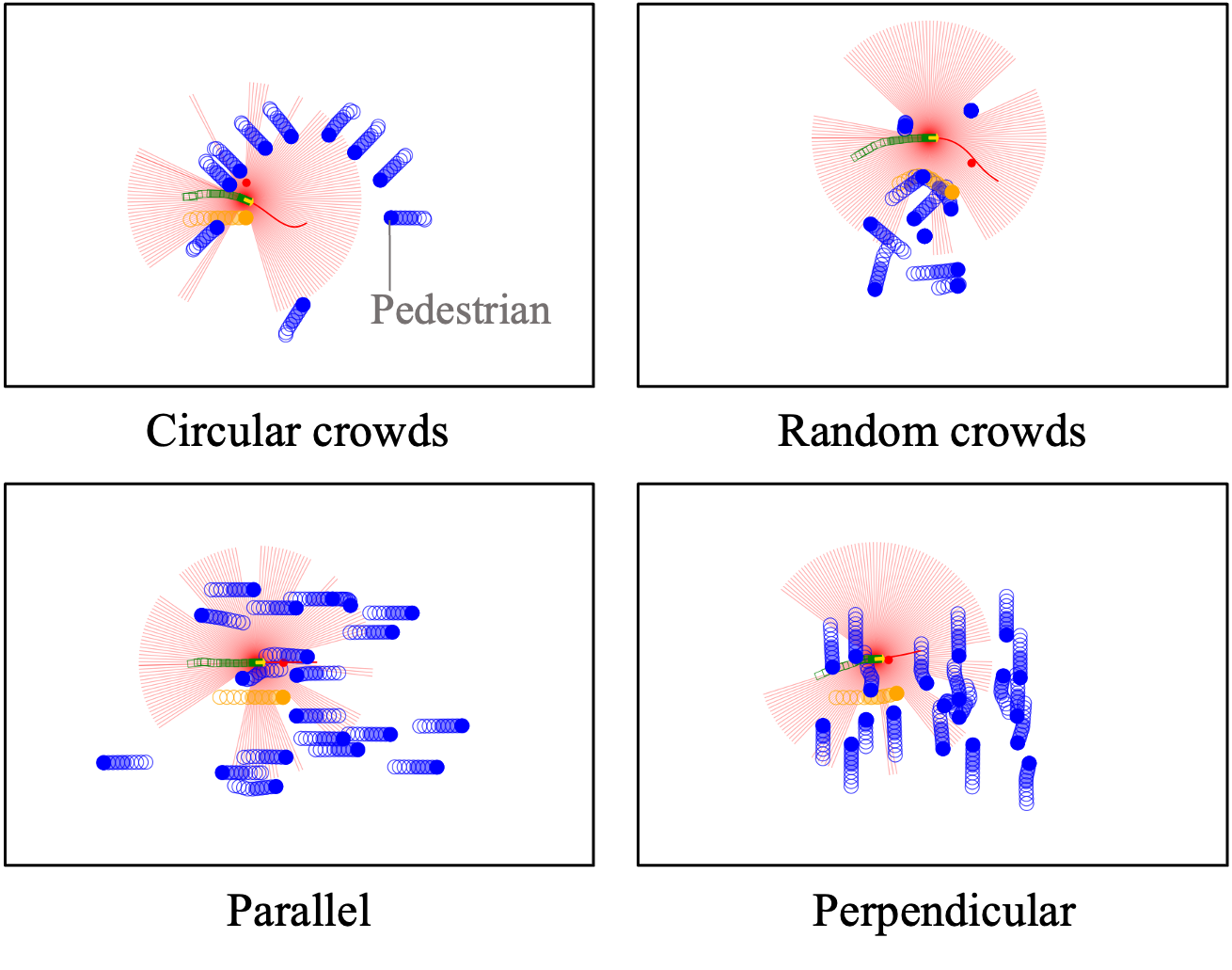
技术框架:Follow-Bench包含以下主要模块:1) 场景生成器:用于生成各种不同的环境布局、目标轨迹模式和人群动态;2) 运动规划器接口:提供统一的接口,方便集成和评估不同的RPF规划器;3) 评估指标:包括安全性指标(如碰撞次数、最小距离)、舒适性指标(如跟随距离、跟随角度)和效率指标(如跟随时间、路径长度);4) 可视化工具:用于可视化仿真结果和评估指标。
关键创新:Follow-Bench的关键创新在于其统一性和综合性。它不仅提供了一个多样化的场景集合,还定义了一套全面的评估指标,从而能够对RPF规划器进行全面、客观的评估。此外,Follow-Bench还重新实现了六种具有代表性的RPF规划器,为研究人员提供了一个可复现的基线。
关键设计:Follow-Bench的关键设计包括:1) 场景生成器的参数化设计,允许用户自定义环境布局、目标轨迹模式和人群动态;2) 评估指标的加权组合,允许用户根据不同的应用场景调整安全性和舒适性的权重;3) 运动规划器接口的标准化,方便集成和评估不同的RPF规划器。
🖼️ 关键图片
📊 实验亮点
实验结果表明,不同的RPF规划器在安全性和舒适性之间存在权衡。在仿真实验中,某些规划器在安全性方面表现更好,而另一些规划器在舒适性方面表现更好。真实实验验证了仿真结果,并揭示了实际部署中需要考虑的因素。Follow-Bench为RPF算法的开发和评估提供了一个有价值的平台。
🎯 应用场景
该研究成果可广泛应用于个人助理机器人、安保巡逻机器人、养老服务机器人和物流机器人等领域。通过Follow-Bench,研究人员可以更方便地开发和评估RPF算法,从而提高机器人在复杂环境中的跟随能力,并确保目标和周围人员的安全和舒适。未来,该研究有望推动机器人跟随技术在实际场景中的广泛应用。
📄 摘要(原文)
Robot person following (RPF) -- mobile robots that follow and assist a specific person -- has emerging applications in personal assistance, security patrols, eldercare, and logistics. To be effective, such robots must follow the target while ensuring safety and comfort for both the target and surrounding people. In this work, we present the first comprehensive study of RPF, which (i) surveys representative scenarios, motion-planning methods, and evaluation metrics with a focus on safety and comfort; (ii) introduces Follow-Bench, a unified benchmark simulating diverse scenarios, including various target trajectory patterns, crowd dynamics, and environmental layouts; and (iii) re-implements six representative RPF planners, ensuring that both safety and comfort are systematically considered. Moreover, we evaluate the two best-performing planners from our benchmark on a differential-drive robot to provide insights into the real-world deployment of RPF planners. Extensive simulation and real-world experiments provide a quantitative study of the safety-comfort trade-offs of existing planners, while revealing open challenges and future research directions.