Robot guide with multi-agent control and automatic scenario generation with LLM
作者: Elizaveta D. Moskovskaya, Anton D. Moscowsky
分类: cs.RO, cs.LG
发布日期: 2025-09-12
备注: 14 pages, 5 figures, 2 tables, 1 demo-video and repository link
💡 一句话要点
提出基于LLM自动生成场景的多智能体导游机器人控制架构
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 导游机器人 多智能体系统 大型语言模型 行为场景生成 人机交互
📋 核心要点
- 传统导游机器人依赖手动配置行为,存在灵活性差、行为不自然等问题,难以适应复杂环境。
- 利用大型语言模型自动生成导游场景,并结合多智能体系统进行资源管理和冲突解决,提升机器人行为的自然性。
- 试验结果表明,该方法在自动化和扩展社交机器人控制系统方面具有潜在价值,能够提升导游机器人的智能化水平。
📝 摘要(中文)
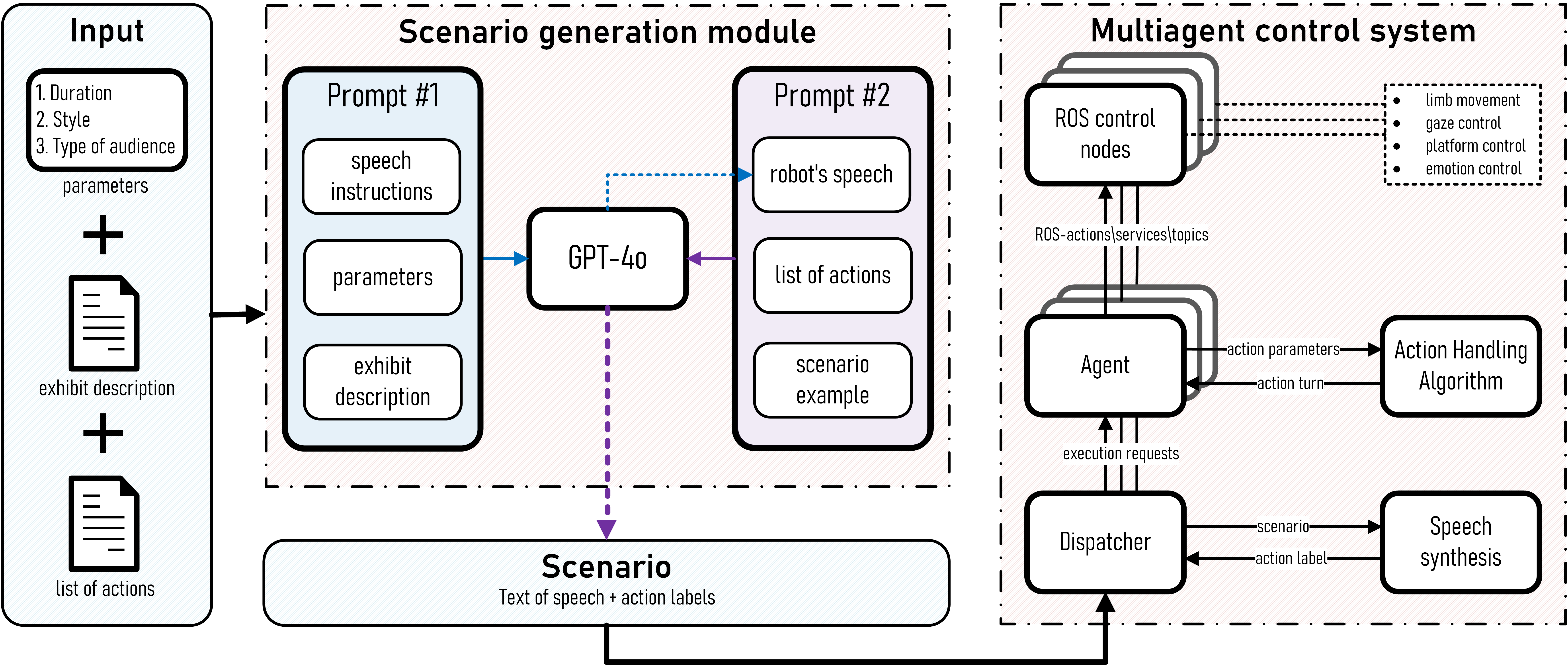
本文提出了一种用于拟人化导游机器人的混合控制架构,该架构结合了多智能体资源管理系统和基于大型语言模型的自动行为场景生成。该方法旨在克服传统系统的局限性,传统系统依赖于手动调整行为场景,存在配置繁琐、灵活性低和机器人行为不自然等问题。 旅游场景的准备过程通过两阶段生成实现:首先,创建风格化的叙述;然后,将非语言动作标签集成到文本中。多智能体系统确保并行动作执行期间的协调和冲突解决,并在主要操作完成后维持默认行为,从而使机器人行为更加自然。试验结果表明,该方法在自动化和扩展社交机器人控制系统方面具有潜力。
🔬 方法详解
问题定义:现有导游机器人系统依赖于手动配置行为场景,这导致了配置过程繁琐、灵活性不足,并且机器人行为缺乏自然性。尤其是在需要机器人执行复杂、多步骤的导游任务时,手动设计和调整行为脚本变得非常困难,难以应对各种突发情况和用户交互。
核心思路:本文的核心思路是利用大型语言模型(LLM)的强大生成能力,自动生成导游机器人的行为场景。通过将LLM生成的文本叙述与非语言动作标签相结合,可以为机器人提供更丰富、更自然的行动指令。同时,引入多智能体系统来协调和管理机器人的行为,确保在执行并行动作时能够避免冲突,并在完成主要操作后维持默认行为,从而提升机器人的整体表现。
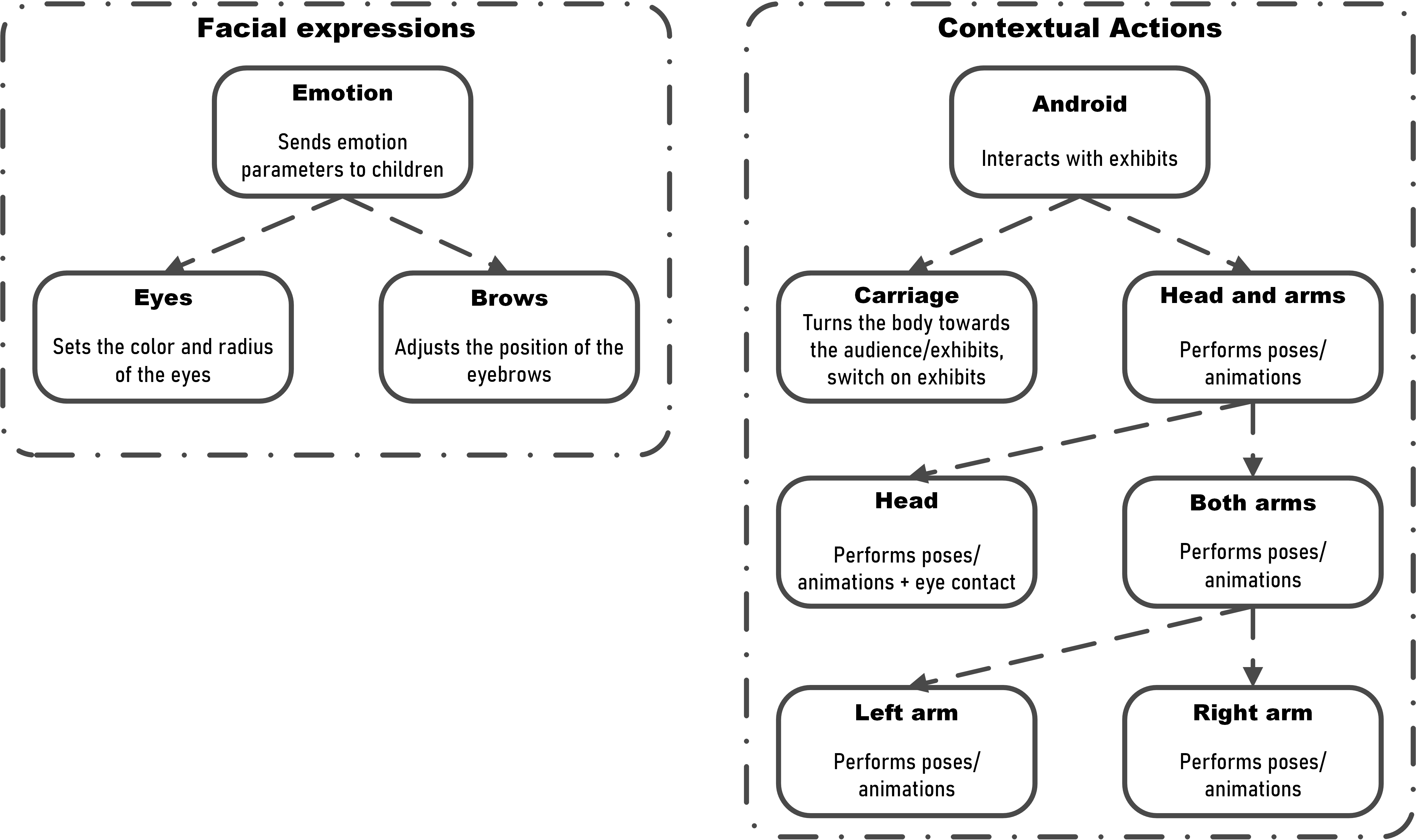
技术框架:该混合控制架构包含两个主要阶段:场景生成阶段和行为执行阶段。在场景生成阶段,首先使用LLM生成风格化的导游叙述文本,然后将非语言动作标签(例如,行走、指向、微笑等)集成到文本中。在行为执行阶段,多智能体系统负责解析带有动作标签的文本,并协调各个智能体(例如,运动控制、语音合成、面部表情等)执行相应的动作。多智能体系统还负责资源管理和冲突解决,确保机器人能够平稳、自然地完成导游任务。
关键创新:该方法的主要创新点在于将大型语言模型与多智能体系统相结合,实现了导游机器人行为场景的自动生成和智能控制。与传统的基于手动配置的方法相比,该方法能够显著降低开发成本,提高系统的灵活性和可扩展性。此外,通过LLM生成的叙述文本和非语言动作标签的结合,可以使机器人的行为更加自然、流畅,从而提升用户体验。
关键设计:在场景生成阶段,需要选择合适的LLM模型,并设计有效的提示语(prompt),以生成符合要求的导游叙述文本。同时,需要定义一套清晰、明确的非语言动作标签,以便多智能体系统能够正确解析和执行。在多智能体系统方面,需要设计合理的通信协议和冲突解决机制,确保各个智能体能够协同工作,并避免出现死锁或资源争用等问题。具体的参数设置和网络结构等技术细节在论文中可能未详细描述,属于未知信息。
🖼️ 关键图片

📊 实验亮点
论文通过试验验证了所提出的混合控制架构的有效性,展示了利用LLM自动生成场景并结合多智能体系统控制导游机器人的可行性。虽然具体的性能数据和对比基线未在摘要中明确给出,但试验结果表明该方法在自动化和扩展社交机器人控制系统方面具有潜力,能够提升导游机器人的智能化水平。
🎯 应用场景
该研究成果可应用于博物馆、展览馆、旅游景点等场所,实现智能化的导游服务。通过自动生成导游场景,可以快速部署和定制不同主题的导游机器人,降低运营成本。此外,该技术还可扩展到其他社交机器人应用领域,例如智能客服、教育机器人等,提升人机交互的自然性和智能化水平。
📄 摘要(原文)
The work describes the development of a hybrid control architecture for an anthropomorphic tour guide robot, combining a multi-agent resource management system with automatic behavior scenario generation based on large language models. The proposed approach aims to overcome the limitations of traditional systems, which rely on manual tuning of behavior scenarios. These limitations include manual configuration, low flexibility, and lack of naturalness in robot behavior. The process of preparing tour scenarios is implemented through a two-stage generation: first, a stylized narrative is created, then non-verbal action tags are integrated into the text. The multi-agent system ensures coordination and conflict resolution during the execution of parallel actions, as well as maintaining default behavior after the completion of main operations, contributing to more natural robot behavior. The results obtained from the trial demonstrate the potential of the proposed approach for automating and scaling social robot control systems.