MIMo grows! Simulating body and sensory development in a multimodal infant model
作者: Francisco M. López, Miles Lenz, Marco G. Fedozzi, Arthur Aubret, Jochen Triesch
分类: cs.RO
发布日期: 2025-09-11
备注: Accepted at IEEE ICDL 2025. 6 pages, 6 figures
🔗 代码/项目: GITHUB
💡 一句话要点
MIMo v2:构建可模拟身体和感觉发育的多模态婴儿模型
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 发育机器人 多模态模型 婴儿模型 感觉运动发育 仿真平台
📋 核心要点
- 现有发育机器人和仿真平台难以模拟婴儿身体生长和感觉运动能力的快速变化。
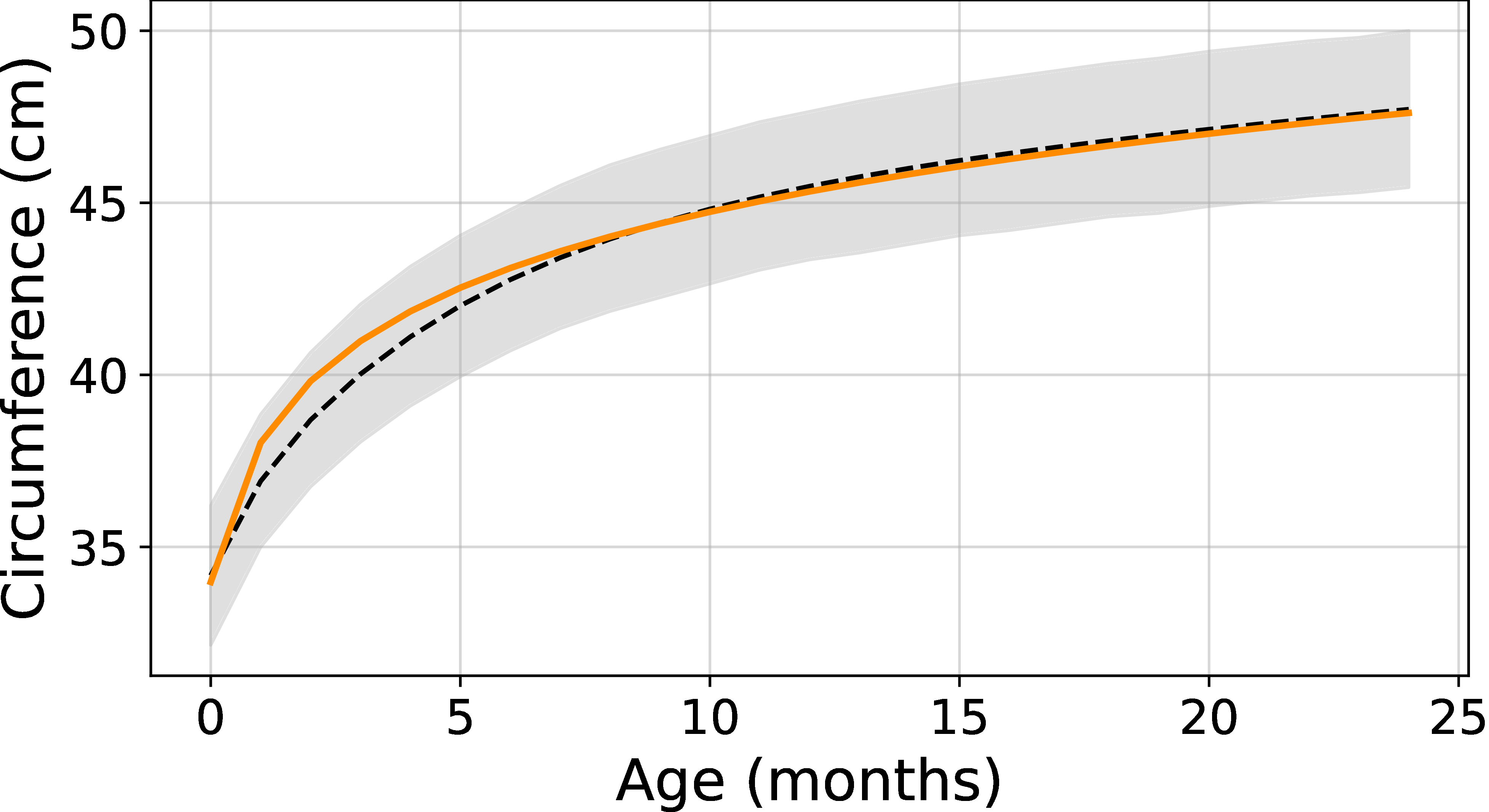
- MIMo v2通过构建一个具有生长身体、发展性视觉和感觉运动延迟的婴儿模型来解决此问题。
- 新版MIMo包含逆运动学模块和随机环境生成器,并增强了与第三方库的兼容性,提高了模拟真实性。
📝 摘要(中文)
本研究提出了MIMo v2,一个多模态婴儿模型的新版本,旨在解决现有发育机器人和仿真平台难以捕捉婴儿快速身体生长和感觉运动能力爆炸性变化的问题。MIMo v2包含一个可生长的身体,其驱动强度随年龄增长(从出生到24个月)。它还具有具有发展性视敏度的中央凹视觉,以及模拟有限信号传输速度的感觉运动延迟。此外,该版本还包括逆运动学模块、随机环境生成器,并更新了与第三方仿真和学习库的兼容性。总体而言,新版MIMo提高了模拟感觉运动发育各个方面的真实性。代码已在官方仓库提供。
🔬 方法详解
问题定义:现有发育机器人和仿真平台通常针对特定年龄段设计,无法捕捉婴儿在出生后24个月内身体快速生长、感觉和运动能力迅速发展的动态过程。这限制了对婴儿感觉运动发育过程的深入研究和理解。现有方法缺乏对婴儿身体变化、视觉发展和神经信号传输延迟的建模。
核心思路:MIMo v2的核心思路是构建一个具有可变参数的婴儿模型,使其能够模拟从出生到24个月的身体生长、视觉发展和感觉运动延迟。通过这种方式,可以更真实地模拟婴儿的感觉运动发育过程,并为研究婴儿的学习和认知发展提供更可靠的平台。
技术框架:MIMo v2的整体框架包括以下几个主要模块:1) 可生长的身体模型:模拟婴儿身体的生长过程,包括身体尺寸、关节活动范围和肌肉力量的变化。2) 发展性视觉系统:模拟婴儿视觉系统的发展,包括视敏度的提高和中央凹视觉的形成。3) 感觉运动延迟模型:模拟神经信号在感觉和运动系统中的传输延迟。4) 逆运动学模块:用于控制婴儿模型的运动。5) 随机环境生成器:用于生成各种不同的环境,以测试婴儿模型的适应能力。6) 第三方库兼容性:支持与常用的仿真和学习库集成。
关键创新:MIMo v2的关键创新在于其综合考虑了婴儿身体生长、视觉发展和感觉运动延迟等多个因素,并将其整合到一个统一的模型中。这使得MIMo v2能够更真实地模拟婴儿的感觉运动发育过程,并为研究婴儿的学习和认知发展提供更全面的平台。与现有方法相比,MIMo v2更注重模拟婴儿的动态发展过程,而不仅仅是静态的身体结构。
关键设计:MIMo v2的关键设计包括:1) 身体生长模型:使用参数化的模型来描述婴儿身体的生长过程,参数可以根据年龄进行调整。2) 视觉发展模型:使用高斯函数来模拟视敏度的提高,并使用中央凹区域来模拟中央凹视觉的形成。3) 感觉运动延迟模型:使用延迟线来模拟神经信号的传输延迟,延迟时间可以根据年龄进行调整。4) 逆运动学模块:使用数值优化方法来求解逆运动学问题,以控制婴儿模型的运动。
🖼️ 关键图片


📊 实验亮点
MIMo v2通过集成身体生长、视觉发展和感觉运动延迟等多个因素,实现了对婴儿感觉运动发育过程的更真实模拟。新版本还增加了逆运动学模块和随机环境生成器,并更新了与第三方库的兼容性,显著提升了模型的可用性和研究价值。虽然论文中没有给出具体的性能数据,但其在模拟真实婴儿行为方面的潜力是显著的。
🎯 应用场景
MIMo v2可应用于发育机器人研究、婴儿认知发展建模、早期干预策略设计等领域。通过模拟婴儿的感觉运动发育过程,可以更好地理解婴儿的学习机制,并为开发更有效的早期教育和干预方法提供理论基础。此外,该模型还可用于测试和验证各种关于婴儿发展的假设。
📄 摘要(原文)
Infancy is characterized by rapid body growth and an explosive change of sensory and motor abilities. However, developmental robots and simulation platforms are typically designed in the image of a specific age, which limits their ability to capture the changing abilities and constraints of developing infants. To address this issue, we present MIMo v2, a new version of the multimodal infant model. It includes a growing body with increasing actuation strength covering the age range from birth to 24 months. It also features foveated vision with developing visual acuity as well as sensorimotor delays modeling finite signal transmission speeds to and from an infant's brain. Further enhancements of this MIMo version include an inverse kinematics module, a random environment generator and updated compatiblity with third-party simulation and learning libraries. Overall, this new MIMo version permits increased realism when modeling various aspects of sensorimotor development. The code is available on the official repository (https://github.com/trieschlab/MIMo).