A Neuromorphic Incipient Slip Detection System using Papillae Morphology
作者: Yanhui Lu, Zeyu Deng, Stephen J. Redmond, Efi Psomopoulou, Benjamin Ward-Cherrier
分类: cs.RO
发布日期: 2025-09-11
备注: 7 pages, 12 figures. Submitted to IEEE Robotics and Automation Letters (RAL), under review
💡 一句话要点
提出一种基于乳突形态的神经形态初始滑动检测系统,用于提升机器人操作安全性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 神经形态计算 触觉传感 滑动检测 脉冲神经网络 机器人操作
📋 核心要点
- 现有边缘平台上的滑动检测系统面临能量约束的挑战,限制了其在机器人操作中的应用。
- 该研究提出了一种基于NeuroTac传感器的神经形态系统,结合脉冲卷积神经网络进行滑动状态分类。
- 实验结果表明,该系统能有效检测初始滑动,且在完全滑动前至少360毫秒即可识别,响应迅速。
📝 摘要(中文)
本文提出了一种神经形态触觉传感系统,用于检测初始滑动,从而实现早期干预,防止物体滑落并提高机器人操作的安全性。该系统基于NeuroTac传感器,该传感器具有基于突出乳突的皮肤,并采用脉冲卷积神经网络(SCNN)进行滑动状态分类。在传感器运动引起的滑动条件下,SCNN模型在三个类别(无滑动、初始滑动和完全滑动)中实现了94.33%的分类精度。在动态重力引起的滑动验证条件下,对SCNN最终层脉冲计数进行时间平滑后,该系统在所有试验中至少在完全滑动前360毫秒检测到初始滑动,始终在完全滑动发生之前识别出初始滑动。这些结果表明,该神经形态系统具有稳定且响应迅速的初始滑动检测能力。
🔬 方法详解
问题定义:论文旨在解决机器人操作中早期滑动检测的问题。现有的滑动检测系统在边缘设备上部署时,面临着计算资源和能量消耗的限制,难以实现实时、高效的滑动检测,从而影响了机器人操作的安全性。
核心思路:论文的核心思路是利用神经形态计算的低功耗特性,结合具有乳突结构的触觉传感器,模拟生物触觉感知机制,并通过脉冲神经网络(SNN)进行信息处理。这种方法旨在降低计算复杂度,提高能量效率,从而实现在边缘设备上的实时滑动检测。
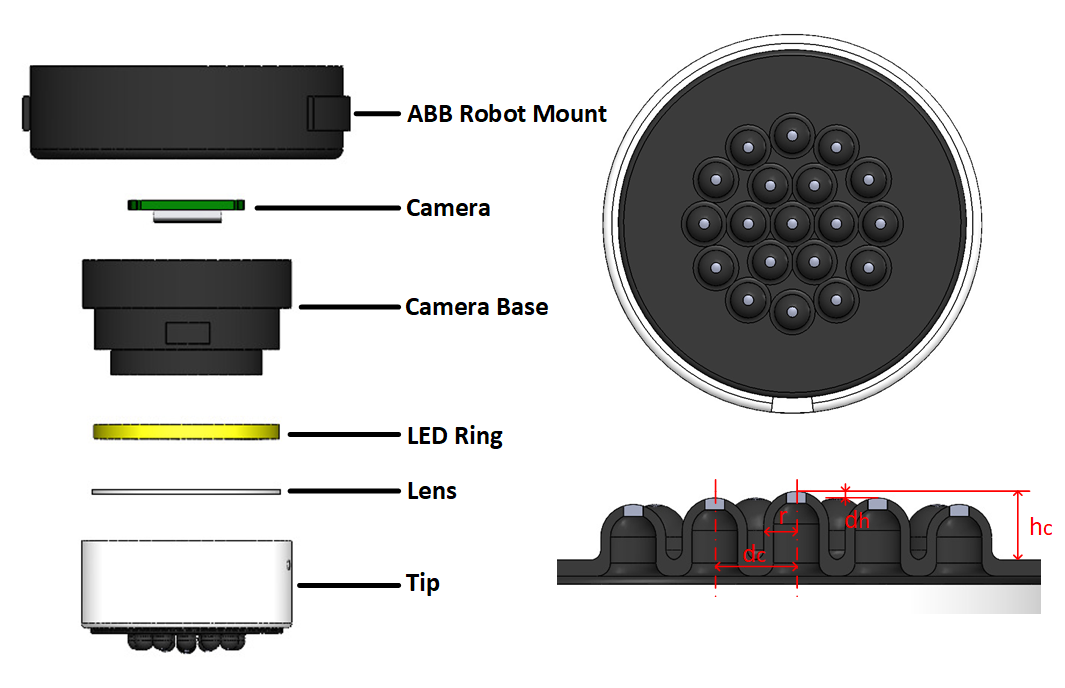
技术框架:该系统的整体框架包括三个主要部分:1) NeuroTac触觉传感器,该传感器具有基于突出乳突的皮肤,用于感知触觉信息;2) 信号处理模块,用于将传感器信号转换为适合SNN处理的脉冲序列;3) 脉冲卷积神经网络(SCNN),用于对脉冲序列进行分类,识别滑动状态(无滑动、初始滑动和完全滑动)。
关键创新:该研究的关键创新在于将神经形态计算与具有特定结构的触觉传感器相结合,构建了一个低功耗、高效率的滑动检测系统。与传统的基于深度学习的滑动检测方法相比,该系统利用SNN的稀疏激活特性,显著降低了计算量和能量消耗。此外,乳突结构的设计模拟了生物触觉感受器的功能,提高了传感器对微小滑动的敏感度。
关键设计:SCNN的网络结构包括卷积层、池化层和全连接层。网络的输入是来自触觉传感器的脉冲序列,输出是三种滑动状态的分类结果。论文中对SCNN的参数进行了优化,以提高分类精度和降低计算复杂度。此外,论文还采用了时间平滑技术,对SCNN最终层的脉冲计数进行平滑处理,以提高滑动检测的鲁棒性。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该系统在传感器运动引起的滑动条件下,SCNN模型在三个类别(无滑动、初始滑动和完全滑动)中实现了94.33%的分类精度。更重要的是,在动态重力引起的滑动验证条件下,该系统在所有试验中至少在完全滑动前360毫秒检测到初始滑动,证明了其具有快速、可靠的初始滑动检测能力。
🎯 应用场景
该研究成果可应用于各种需要精确操作和安全保障的机器人应用场景,例如:工业机器人中的精密装配、医疗机器人中的微创手术、服务机器人中的物体抓取等。通过及早检测到初始滑动,可以防止物体掉落或操作失误,提高机器人操作的可靠性和安全性,并降低潜在的风险。
📄 摘要(原文)
Detecting incipient slip enables early intervention to prevent object slippage and enhance robotic manipulation safety. However, deploying such systems on edge platforms remains challenging, particularly due to energy constraints. This work presents a neuromorphic tactile sensing system based on the NeuroTac sensor with an extruding papillae-based skin and a spiking convolutional neural network (SCNN) for slip-state classification. The SCNN model achieves 94.33% classification accuracy across three classes (no slip, incipient slip, and gross slip) in slip conditions induced by sensor motion. Under the dynamic gravity-induced slip validation conditions, after temporal smoothing of the SCNN's final-layer spike counts, the system detects incipient slip at least 360 ms prior to gross slip across all trials, consistently identifying incipient slip before gross slip occurs. These results demonstrate that this neuromorphic system has stable and responsive incipient slip detection capability.