BagIt! An Adaptive Dual-Arm Manipulation of Fabric Bags for Object Bagging
作者: Peng Zhou, Jiaming Qi, Hongmin Wu, Chen Wang, Yizhou Chen, Zeqing Zhang
分类: cs.RO, eess.SY
发布日期: 2025-09-11
💡 一句话要点
提出一种自适应双臂操作策略,用于机器人自动抓取袋子进行物体装袋
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人操作 可变形物体操作 双臂机器人 自动化装袋 视觉伺服
📋 核心要点
- 工业装袋任务中,袋子的可变形和不可预测性给机器人操作带来挑战,现有方法难以适应。
- 提出自适应结构兴趣点(SOI)操作策略,通过视觉反馈动态调整动作,无需预先了解袋子属性。
- 实验验证了系统在不同物体上的装袋能力,展示了其精确性和鲁棒性,为可变形物体操作提供新方案。
📝 摘要(中文)
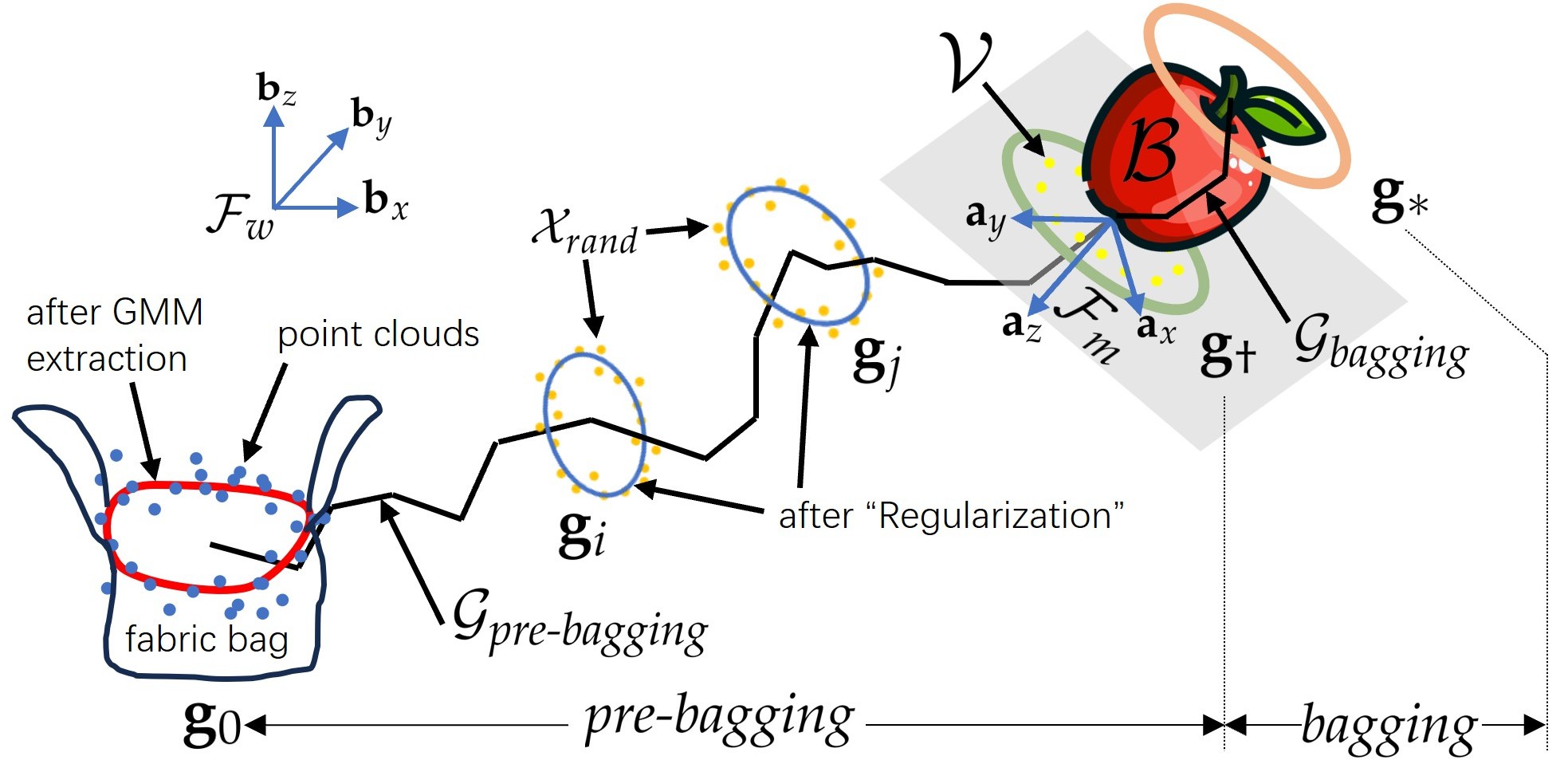
本文提出了一种用于双臂机器人的自适应结构兴趣点(SOI)操作策略,旨在解决工业场景中常见的装袋任务。考虑到袋子的复杂性和不可预测性,该系统能够基于实时视觉反馈动态调整其动作,无需预先了解袋子的属性。该框架结合了高斯混合模型(GMM)用于估计SOI状态,优化技术用于SOI生成,使用约束双向快速探索随机树(CBiRRT)进行运动规划,以及使用模型预测控制(MPC)进行双臂协调。大量实验验证了该系统在各种物体上执行精确和鲁棒装袋的能力,展示了其适应性。这项工作为机器人可变形物体操作(DOM)提供了一种新的解决方案,尤其是在自动化装袋任务中。
🔬 方法详解
问题定义:论文旨在解决工业自动化中,使用机器人进行物体装袋的问题。现有方法通常需要预先了解袋子的形状、材质等属性,并且难以应对袋子在操作过程中的形变和不确定性,导致装袋效率低、鲁棒性差。
核心思路:论文的核心思路是利用视觉反馈,实时估计袋子的状态,并根据状态动态调整机器人的操作策略。通过定义“结构兴趣点”(SOI),将复杂的袋子操作简化为对关键点的控制,从而提高操作的效率和鲁棒性。
技术框架:该系统的整体框架包括以下几个主要模块:1) SOI状态估计:使用高斯混合模型(GMM)对视觉数据进行处理,估计SOI的位置和姿态。2) SOI生成:通过优化算法,确定合适的SOI位置,以实现最佳的装袋效果。3) 运动规划:使用约束双向快速探索随机树(CBiRRT)算法,规划双臂机器人的运动轨迹,确保运动的安全性和效率。4) 双臂协调:使用模型预测控制(MPC)算法,协调双臂机器人的运动,实现精确的装袋操作。
关键创新:该论文的关键创新在于提出了自适应的SOI操作策略。与传统的基于预定义规则的操作策略不同,该策略能够根据实时视觉反馈动态调整机器人的动作,从而更好地适应袋子的形变和不确定性。此外,将GMM、CBiRRT和MPC等多种技术相结合,构建了一个完整的自动化装袋系统。
关键设计:在SOI状态估计中,GMM用于对袋子的视觉特征进行建模,通过最大化似然函数来估计SOI的位置和姿态。在运动规划中,CBiRRT算法考虑了机器人的运动学约束和环境约束,生成安全可行的运动轨迹。在双臂协调中,MPC算法通过预测未来状态,优化控制输入,实现精确的装袋操作。具体的参数设置和损失函数在论文中有详细描述。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该系统能够成功完成各种物体的装袋任务,并且具有良好的鲁棒性和适应性。与传统的基于规则的方法相比,该系统能够显著提高装袋效率,并减少人工干预。具体的性能数据和对比基线在论文中有详细展示,视频演示见 https://youtu.be/6JWjCOeTGiQ。
🎯 应用场景
该研究成果可广泛应用于自动化生产线、仓储物流等领域,实现对各种物体的自动装袋。例如,在食品包装、服装打包、零件装配等场景中,可以显著提高生产效率,降低人工成本。未来,该技术有望进一步扩展到其他可变形物体的操作任务中,例如折叠衣物、整理线缆等。
📄 摘要(原文)
Bagging tasks, commonly found in industrial scenarios, are challenging considering deformable bags' complicated and unpredictable nature. This paper presents an automated bagging system from the proposed adaptive Structure-of-Interest (SOI) manipulation strategy for dual robot arms. The system dynamically adjusts its actions based on real-time visual feedback, removing the need for pre-existing knowledge of bag properties. Our framework incorporates Gaussian Mixture Models (GMM) for estimating SOI states, optimization techniques for SOI generation, motion planning via Constrained Bidirectional Rapidly-exploring Random Tree (CBiRRT), and dual-arm coordination using Model Predictive Control (MPC). Extensive experiments validate the capability of our system to perform precise and robust bagging across various objects, showcasing its adaptability. This work offers a new solution for robotic deformable object manipulation (DOM), particularly in automated bagging tasks. Video of this work is available at https://youtu.be/6JWjCOeTGiQ.